Всех приветствую, кто заглянул на огонек. Речь в обзоре пойдет, как вы наверно уже догадались, о 6-ти осевом квадрокоптере Bayang X5 — бюджетной копии всем известного квадрика Syma X5 с отличным функционалом. Всего планируется две части — непосредственно сам обзор квадрика и его небольшая доработка. В первой части я попытаюсь простым языком объяснить некоторые функции, а также опишу доработку комплектного зарядного устройства, ибо эта первая необходимость. При удачном раскладе во второй части будет описана замена проводов для питания двигателей на более толстые (стоковые провода очень тонкие, большие потери), замена шестерен и самих движков, установка защиты для шестеренок, замена антенны передатчиков и установка нового 1100mah аккумулятора с небольшим допилом. Если интересна первая часть, прошу под кат. Краткие ТТХ:
— Производитель — Bayang
— Номер модели – X5
— Общий вес без/с защитой и опорами — 100г
— Высота с опорами — 75мм
— Размах — 360мм
— Аккумулятор – 3,7V Li-Pol 600mah (SY 802540) с платой защиты
— Защита от переразряда – да, около 3V (светодиодная индикация)
— Стабилизация – 6-ти осевой датчик движения
— Диаметр отверстия под двигатели – 7мм
— Видеокамера – в данной версии нет (есть в X5C-1)
Дополнительные функции:
— headless mode (безголовый режим) – да
— Auto Home (автовозврат) – да
— 3D Eversion (автофлип) – да
— High/Low speed switch (режим газа) – да (по факту нет)
— Подстройка квадрокоптера — да
Полетные характеристики:
— Время полета при полной нагрузке и среднем газу — 7-8 мин.
— Грузоподъемность (с защитой и опорами) – 75гр
Пульт ДУ:
— Кол-во каналов — 4
— Частота — 2,4GHz
— дальность приема – 100 метров
— Питание – 4хАА батарейки/аккумулятора
Комплект поставки:
— квадрокоптер Bayang X5 с установленными винтами и 3,7V Li-Pol аккумулятором 600mah
— пульт ДУ (без элементов питания)
— зарядное устройство без адаптера/БП (нужен порт USB)
— 4 запасных винта/пропеллера
— 4 защиты для винтов/пропеллеров
— крестовая миниотвертка
— инструкция на английском языке
Как видим, комплектация бюджетная, но все необходимые компоненты присутствуют. Поставляется квадрик в красочной картонной коробке, правда на ней указана модель X5C-1, т.е. с камерой:
По факту, внутри обнаруживаем модель X5, т.е. базовая, без видеокамеры. Об этом говорит небольшая надпись с торца коробки:
Ну да ладно, тем более в бюджетных моделях толковой камеры нет, зачастую 2МП, а весит она прилично, да и кушает неплохо. Многие через пару полетов ее снимают, ибо качество съемки хромает.
Внутри коробки полипропиленой бокс, в котором помещается все необходимое, плюс он выполняет защиту при транспортировке:
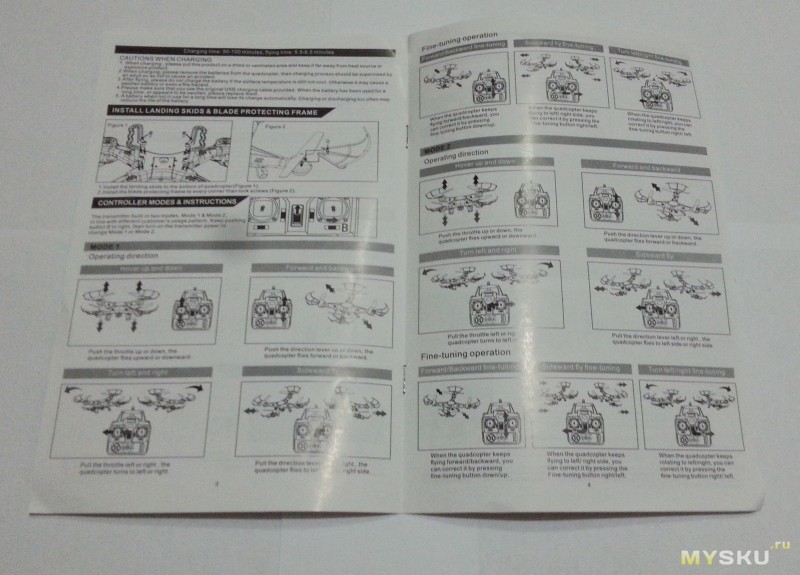
4 запасных винта были приклеены внутри пластикового бокса (снизу), поэтому обнаружил я их не сразу, :-). Комплектная инструкция совсем краткая, да еще и на английском. Для тех, кто приобретает квадрик в первый раз, разобраться во всем будет немного сложновато:
Итак, переходим непосредственно к квадрокоптеру:
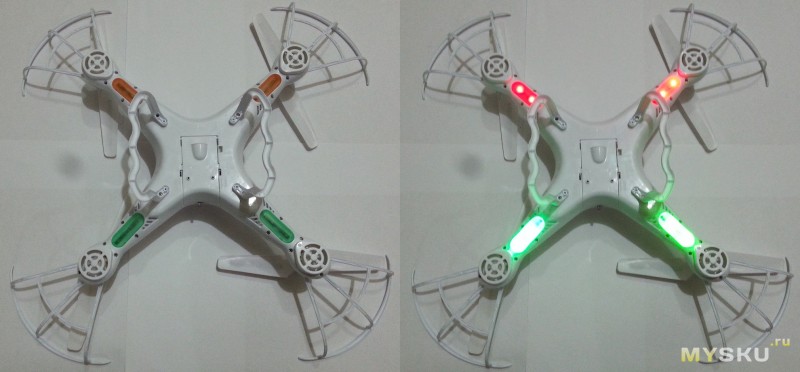
Данная модель квадрокоптера представляет не что иное, как копию всеми известного квадрика Syma X5:
Отличия незначительные — на мой взгляд более широкая защита винтов и более продуманная защита шестеренок (у Syma X5 шестеренки практически не защищены). Зачем производитель оставляет отверстия для меня остается загадкой, ведь смазывать шестеренки не нужно:
У нас же хоть и не идеальная, но все же защита. Несколько раз он падал в снег, пока моторы и шестерни целы. Смазывать шестерни не рекомендуется. Как защитить шестерни – см. во второй части.
Размеры квадрокоптера внушительные – 36см (до противоположных краев пропеллеров), по рекомендациям многих моделистов — это самый оптимальный размер для первого квадрика, ибо мини и нано версии слишком миниатюрны и постоянно путаешь перед и зад, да и больно маневренные они. Поэтому, если вам по душе РУ модельки, то для учебы берите бюджетную копию среднего по размерам квадрика. Как говорится, стоит недорого и убить не жалко.
Для управления в темное время суток, а также для ориентации (перед/зад) квадрика встроена подсветка в виде светодиодных лент (красный – перед, зеленый — зад):
При низком заряде аккумулятора подсветка начинает мигать, а при критическом – снижаются обороты движков и квадрик плавно спускается на землю. Контроллер сигнализирует о разряде не сразу, есть некий запас энергии, но как только подсветка замигала – лучше приземлять аппарат на базу. Стабилизация в квадрике 6-ти осевая, он сам выравнивается в пространстве, поэтому его можно с легкостью запускать с руки, просто откинув его в сторону. Квадрик можно сравнить с кошкой, всегда приземляется на лапы.
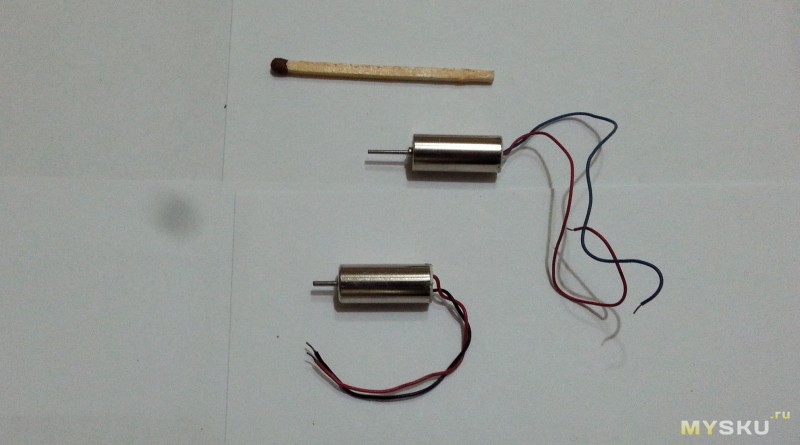
В квадрокоптере установлены коллекторные моторы. Благодаря неодимовым магнитам в качестве статора, эти малютки выдают очень бешеную скорость вращения. К сожалению, приходится платиться сроком службы и надежностью. При работе они ощутимо нагреваются и от огромных оборотов либо коллектор, либо щетки приказывают долго жить, ибо механическое трение, искрение и большие обороты дают о себе знать. Вот такие крохи там установлены, рекомендую прикупить в запас вместе с шестеренками:
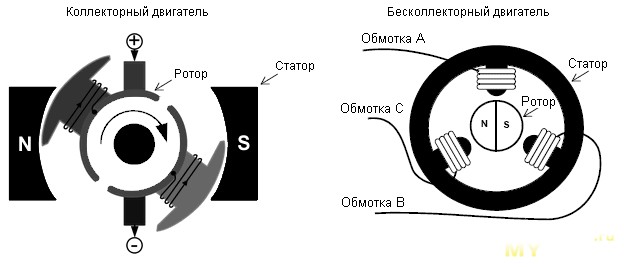
Для справки, есть коллекторные и безколлекторные моторы (взято отсюда):
Коллекторный и безколлекторный моторы:
Безколлекторные моторы имеют значительные преимущества перед коллекторными, но дороги, больше по размерам и сложнее в запуске, поэтому в бюджетных квадриках практически не встречаются.
Аккумулятор:
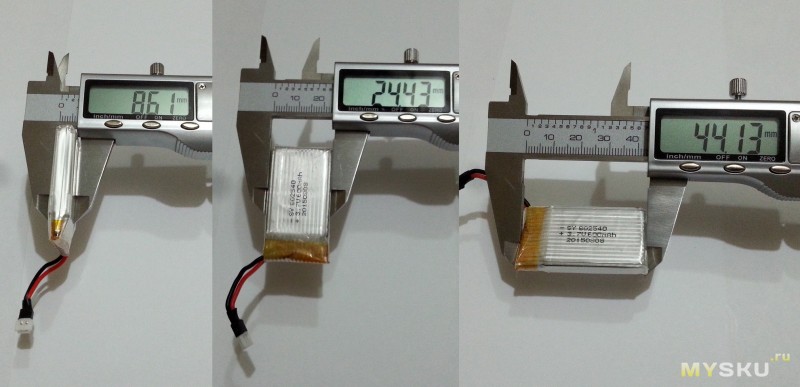
В квадрокоптере установлен 3,7V Li-Pol аккумулятор (липолька) емкостью 600mah (SY 802540), хотя в описании числится 500mah:
Залитая емкость составляет 627mah, реальная емкость аккумулятора будет в районе 600mah, что позволяет летать квадрику на среднем газу около 7-8 минут:
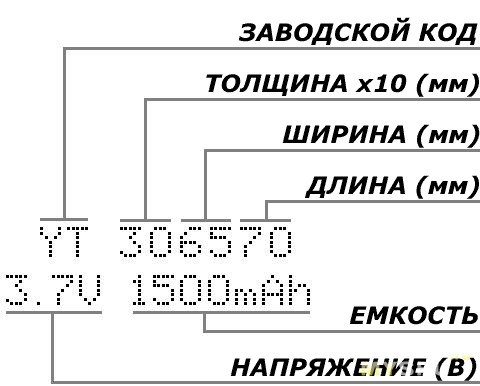
Для тех, кому интересна расшифровка маркировки липолек (взято отсюда):
Наш аккум имеет маркировку SY 802540, что должно бы означать 8мм толщина, 25мм ширина и 40мм длина. На самом деле так и есть, но это размер «ячейки» без защиты, а у нас встроена плата защиты, поэтому размеры чуть больше из-за дополнительной оболочки:
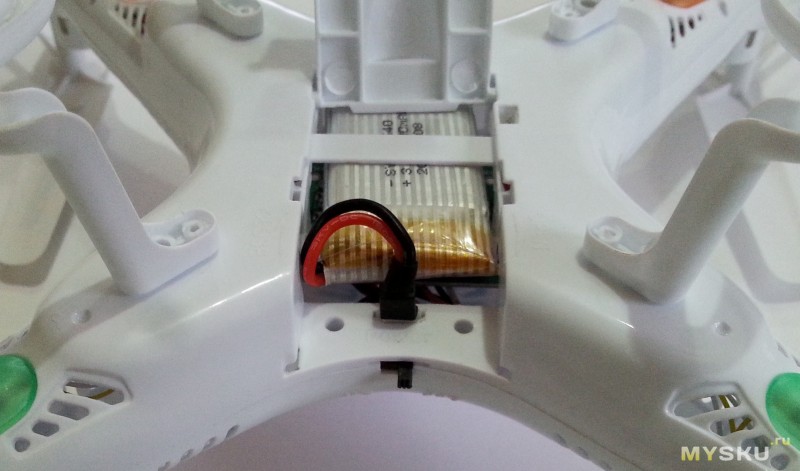
Отличительная особенность данного квадрика в том, что практически все элементы скрыты внутри корпуса, поэтому для аккумулятора продуман специальный отсек с защелкой:
Размеры отсека небольшие, но с некоторой доработкой позволяет установить более емкий аккумулятор, например на 1100mah. Об этом во второй части.
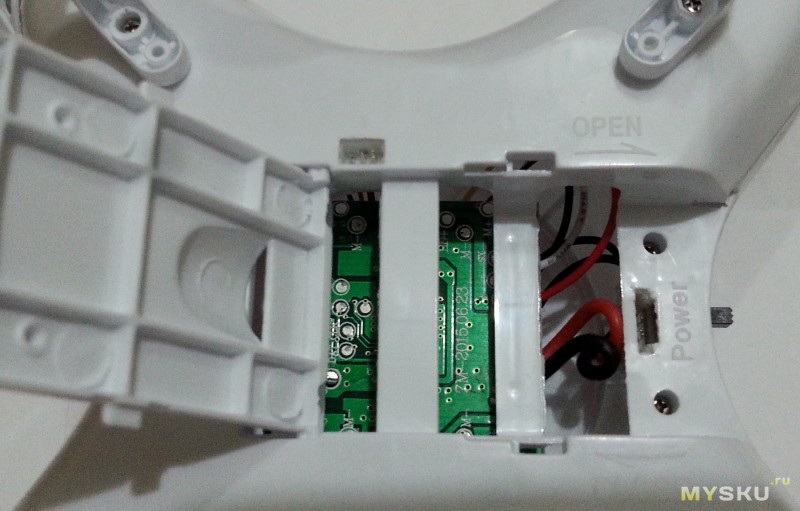
Выключатель питания расположен сбоку:
Разъем для видеокамеры: 4-х канальный пульт ДУ:
В комплекте поставляется самый базовый 4-канальный пульт ДУ, работающий на частоте 2,4 GHz и имеющий дальность приема около 100 метров (около 50м точно пробивает, дальше не пробовал):
Питается пульт от 4 АА батареек/аккумуляторов. По дальности приема ничего сказать не могу, ибо не имею достаточного опыта в пилотировании вдали «на глаз», но 50-60 метров держит отлично (в видео запускался на школьном стадионе, обрывов связи не было). Пульт средних размеров, в руках лежит очень удобно, а это главное, иначе можно потерять многое в управлении, если сравнивать с миниатюрными пультами.
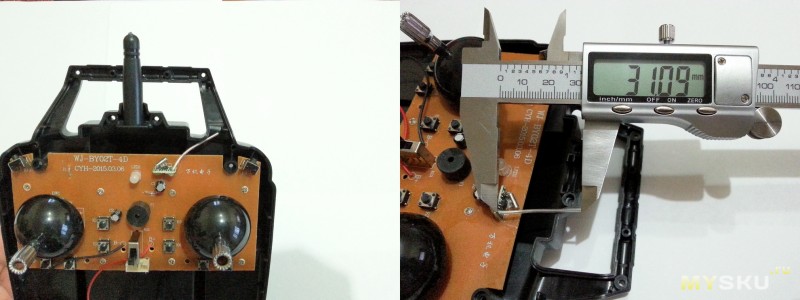
Кишочки пульта:
Первое, что бросается в глаза, антенна какая-то короткая, :-). Но на самом деле это самая базовая ВЧ антенна, именуемая в народе — четвертьволновой монополь. Монополь, по-простому, означает один ВЧ проводник. Диполь – два проводника, обычно это жила в оплетке/трубке. К сожалению, модуль ВЧ передатчика заклеен термоклеем, поэтому посмотреть маркировку не представляется возможным. Длина антенки равна 3,1см, как раз четверть длины волны (300/2400MHz=0,125м или 12,5см). При удачном раскладе я попробую заменить антенну, о результатах мб напишу во второй части статьи.
Пульт ДУ 4-х канальный, т.е. управление квадриком передается по четырем разным каналам: крен (влево/вправо), тангаж (вперед/назад), газ (изменение высоты) и вращение вокруг своей оси. Пульты с большим количеством каналов нужны для более навороченных моделей, например FPV, которые несут на себе камеру, т.е. плюс пару каналов на передачу видео и управление подвесом, на управление БК моторами, дополнительные устройства, к примеру, GPS, маячки и т.д. Т.е. для более дорогих моделей квадриков нужны пульты с большим количеством каналов.
Управление пультом ДУ:
Управление для первого режима (Mode 1):
— выключатель питания – при включенном квадрокоптере, при нажатии данной кнопки раздается звуковой сигнал и в течение 1-2 секунд происходит «стыковка». Как только приемник и передатчик состыковались, пульт издает еще один контрольный сигнал. Рычажок газа трогать не нужно! Защита от случайного включения моторов присутствует (если джойстик газа не в минимуме, моторы не включатся)
— левый рычаг (вперед/назад) – регулятор газа. Рычаг очень «мягкий», нужно привыкать, в данной модели всего одна скорость
— левый рычаг (влево/вправо) – поворот/вращение вокруг своей оси (rudder). Влево/вправо рычаг подпружинен, новичкам будет сложновато разворачивать квадрик, т.к. с непривычки будет прибавляться/убавляться регулятор газа и вместе с поворотом квадрик будет подниматься вверх или опускаться. Но через некоторое время разворачивать квадрик не составит проблемы
— правый рычаг (вперед/назад) – тангаж (elevator), т.е. наклон вперед/назад и следовательно движение вперед/назад (для новичков – как в фильмах начинают движение вертолеты, носом вниз, :-))
— правый рычаг (влево/вправо) – крен (aileron), т.е. наклон влево/вправо (для новичков – будет лететь как бы боком с наклоном)
— переключатель газа – регулятор газа, для дома низкий, для улицы высокий. В данной модели не работает, :-(
— 3D поворот или в народе «флипы» — нажимаем и тянем правый рычаг, в зависимости от того, в какую сторону зажали, туда и повернется квадрик (типа сальто). Выглядит интересно, напоминает мертвую петлю
— управление камерой – при нажатии кнопки вверх, камера делает фото. При нажатии вниз – снимает видео
— триммеры – нужны для подстройки квадрика, чтобы его не тянуло в разные стороны. Дома триммировать/настраивать не очень удобно, лучше всего это делать на улице в безветренную погоду. В зависимости от того, куда тянет, жмакаем кнопку триммера в противоположную сторону n-ое количество раз. Можно подстроить вплоть до того, что квадрик будет висеть в воздухе неподвижно
— если перемудрили с триммерами и квадрик совсем не слушается – зажимаем левый и правый рычаг в нижний правый угол на пару секунд. Произойдет рекалибровка и квадрик моргнет подсветкой, все настройки сбросятся.
— если вы новичок в управлении, то очень полезная функция – Headless Mode (безголовый режим) – т.е. без разницы, какой стороной квадрокоптер к вам повернут. Любая сторона, которая ближе к вам – зад. Это очень удобно, когда квадрик улетел высоко/далеко и вы не можете разглядеть подсветку. Смело шлепайте на триммер влево и зажимайте стик/рычаг на себя (при условии, что квадрик летит по прямой от вас), квадрокоптер полетит назад. Также присутствует режим Auto Home (автовозврат) – но в квадрике нет GPS модуля, поэтому возвращается он по памяти ваших нажатий на пульт ДУ. Если честно, не пробовал эту функцию, с учетом ветра можно вообще потерять квадрик, уж лучше сбросить газ.
— выбор режима (Mode 1 и Mode 2) – режим управления для профи и новичков, на мой взгляд кому как удобнее. Для включения зажимаем правый нижний триммер вправо и включаем пульт. Отличия заключаются только в том, что в зависимости от режима, рычаг крена или поворота вокруг своей оси может быть либо на левом рычажке, либо на правом. Для новичков, наверно, ближе вариант Mode 2, где крен влево/вправо расположен на левом рычажке, вместе с газом, а поворот вокруг своей оси – справа. Т.е. можно поворачивать квадрик не тревожа рычаг газа.
Зарядное устройство и его переделка:
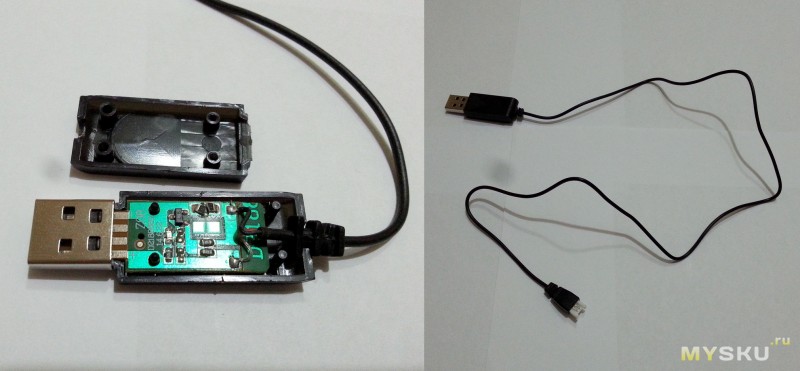
Комплектное зарядное устройство уж слишком примитивное, в деле я его опробовать не успел, ибо на выходе оно давало около 5V, а как известно, с липольками не шутят, от переразряда этот тип лития очень хорошо горит. При работе горел красный индикатор (адаптера/БП в комплекте не было), а при нечаянном КЗ контактов оно и вовсе приказало долго жить (фото до поломки):
При разборке стокового ЗУ обнаружился треснутый SMD резистор:
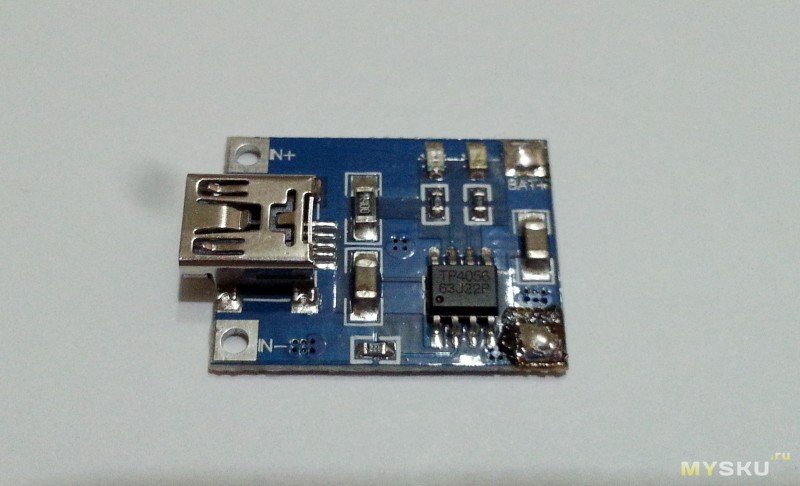
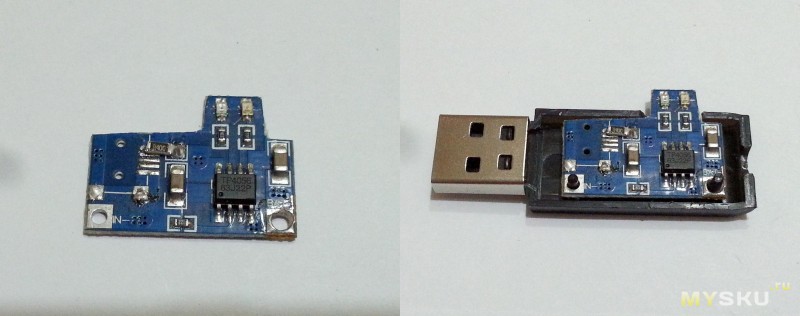
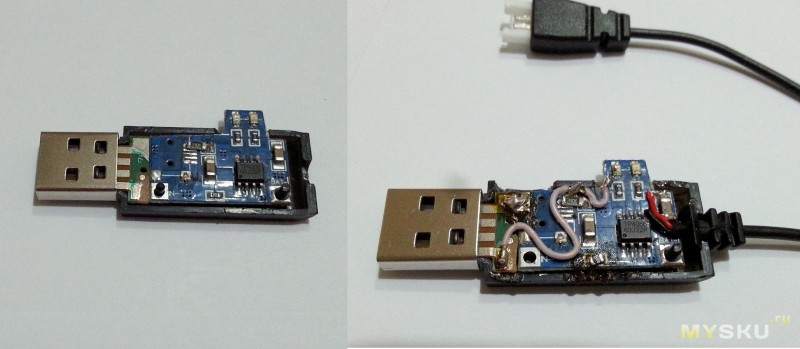
Чтобы обезопасить эксплуатацию аккумулятора, а также продлить и без того небольшое время жизни липольки (около 500 циклов заряд-разряд), решено было сделать новое ЗУ на базе народной платки TP4056 в старом корпусе, минуя, как говорится, провод USB->miniUSB:
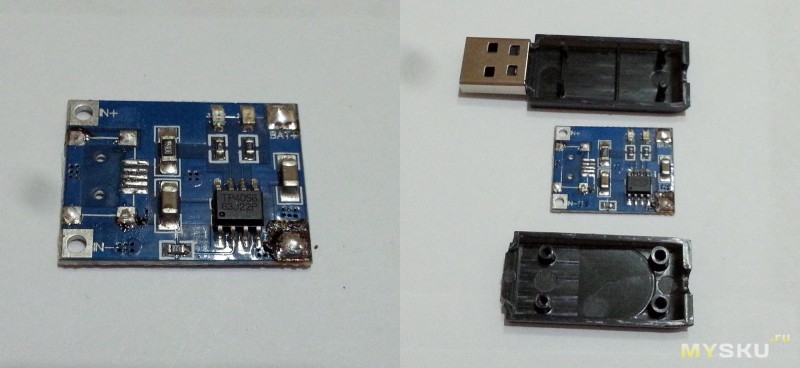
Для этого выпаиваем разъем miniUSB и удаляем припой с выходного минусового контакта (платка оденется на эти штырьки):
Далее вырезаем платку так, чтобы она вошла в стоковое ЗУ, индикаторы не трогаем (при желании их также можно перепаять):
Проверяем целостность всех дорожек, где есть обрыв дублируем дорожку тонким проводом, к примеру МГТФ:
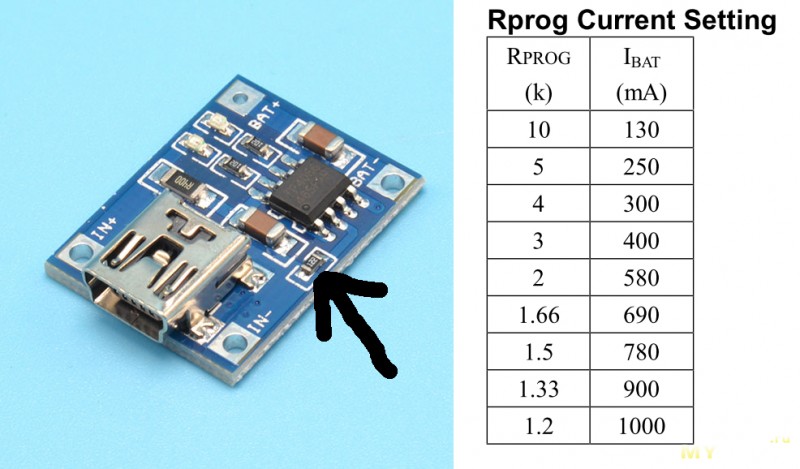
В стоковом варианте платку использовать нельзя, ибо ток заряда для липолек должен быть в диапазоне 0,7С, где С – емкость аккума. Для нашего акка с емкостью 600mah достаточно 420mah, а вот дефолтного варианта с током заряда в 1А очень много. Для изменения тока заряда подбираем подходящий токозадающий резистор по таблице (точность и мощность резюка не особо важны, какой найдете):
В моем варианте можно увидеть прорезь для микропереключателя, т.к. я планировал сделать через 3-х выводной переключатель два режима на выбор (500ма и 1000ма) – для стокового 600mah аккумулятора и покупного 1100mah. Но потом подумал, что квадриком будет пользоваться ребенок и все демонтировал, ибо все равно когда-нибудь она забудет про переключатель.
В итоге получается что-то типо этого. При желании можно пройтись клеем/герметиком/термоклеем по индикаторам, хотя изолировать их особого смысла нет:
Данная зарядка уже отработала около 10 раз, проблем нет, за безопасность я спокоен. По заряду все просто: красный индикатор – заряжается, синий – заряжен. В моем варианте токозадающий резистор – 2,2К, что позволяет установить зарядный ток около 500ma:
Теперь пройдемся по весу:
Вес квадрика с защитой и опорами/лыжами около 100гр (типичный вариант для дома):
Вес квадрика без защиты и опор/лыж около 90гр (типичный вариант для улицы):
Защита винтов/пропеллеров — 8гр:
Винты/пропеллеры – 7гр:
Опоры/лыжы – 2гр:
Li-Pol аккумулятор 600mah (SY 802540) с платой защиты – 17гр:
При тестах, квадрокоптер с защитой и опорами поднял 75гр веса. При этом обороты были на 70-80% от максимальных. При снятой защите и без опор, думаю осилит 80-85гр веса. Как только приедет новенький 1100mah аккумулятор попробую с ним, думаю он весит не более 35гр.
Видео:
Плюсы:
+ малая стоимость
+ средний размер (легко научиться базовым навыкам пилотирования)
+ приятный внешний вид
+ наличие дополнительных аксессуаров в комплекте (защита, опоры, винты)
+ механическая прочность (гибкий пластик)
+ очень резвая и послушная модель (опять плюс новичку)
+ неплохая стабилизация
+ хорошая дальность приема
+ запчасти дешевые и встречаются во многих магазах
+ закрытый корпус (все детали спрятаны внутри)
+ наличие режимов Headless и Auto Home, которые очень помогают новичку
Минусы:
— малый вес при больших габаритах, при ветре очень легко сносит (сопротивляться тяжело)
— отсутствует режим переключения мощности газа (расходы)
— комплектное ЗУ никуда не годится (на распайку)
— не слишком долговечные моторы и шестерни (особенность всех бюджетных квадриков)
Вывод: отличный квадрокоптер для начинающих, послушный, простой в управлении. Отлично подойдет в качестве подарка ребенку, он не останется равнодушным. При поломках найти нужную запчасть не составит труда. Рекомендую в качестве первого бюджетного квадрика!
Спасибо за качественный обзор. Приятно читать когда по ходу обзора объясняются все нюансы. Уже научился по содержимому определять 18 пункт обзора. Но в вашем обзоре до конца был уверен что купили за свои деньги.
Спасибо за подробный обзор!
Предугадывая наличие в этом топике любителей коптеров, посмею немного поофтопить)
Реально ли до 50$ купить квадрокоптер с камерой и качеством картинки «что бы было не стыдно друзьям показать»? Или без неё, но способный выдержать вес Xiaomi Yi (72 г) без каких-либо проблем. Сабж, как я понял, с этим справится может. Вот только можно ли их состыковать и каким образом? Заранее спасибо)
с камерой купить не реально, качество съемки будет удручать.
я брал себе для Xiaomi YI квадрик Tarantula X6, достаточно крупный, маневренный и очень мощный. Таскает камеру в аквабоксе или наже на подвесе со стабтлизацией без проблем.
И цена даже в рублях вполне лояльная.
Наверное позже напишу тут обзор на свой квадрик :)
Маркетинг, :-)
PS, на самом деле 6-ти осевой датчик движения — 3-х осевой гироскоп (по идее больше не бывает, XYZ) и трехосевой акселерометр…
PPS, чтобы не путать, исправил…
В самом начале обзора написано — при удачном раскладе все остальные доработки будут описаны во второй части. Допилинг зарядного устройства тоже хотел оставить для второй части, но стоковый зарядник приказал долго жить, поэтому добавил в первую. Остальные сравнения по дальности и времени полета — мб во второй части…





























Как у него с маневреностью?? Сима была весьма задумчива в этом плане.
Предугадывая наличие в этом топике любителей коптеров, посмею немного поофтопить)
Реально ли до 50$ купить квадрокоптер с камерой и качеством картинки «что бы было не стыдно друзьям показать»? Или без неё, но способный выдержать вес Xiaomi Yi (72 г) без каких-либо проблем. Сабж, как я понял, с этим справится может. Вот только можно ли их состыковать и каким образом? Заранее спасибо)
я брал себе для Xiaomi YI квадрик Tarantula X6, достаточно крупный, маневренный и очень мощный. Таскает камеру в аквабоксе или наже на подвесе со стабтлизацией без проблем.
И цена даже в рублях вполне лояльная.
Наверное позже напишу тут обзор на свой квадрик :)
У меня получилось заметно больше.
PS, на самом деле 6-ти осевой датчик движения — 3-х осевой гироскоп (по идее больше не бывает, XYZ) и трехосевой акселерометр…
PPS, чтобы не путать, исправил…
— какой акум на 1100 заказать?
— антену получилось усилить?