Ещё год назад как-то не представлял, что Xiaomi начнёт снабжать население игрушками. А сейчас выкатываю обещанный обзор про радиоуправляемого робота на гусеничном ходу, который нужно будет собирать из конструктора самостоятельно.
Очень много фото.
Трафик: вес обзора 27.9 MB
Технические характеристики
▫️ 1086 деталей
▫️ Bluetooth 4.0, Wi-Fi 2.4G, Type-C
▫️ Процессор 32-битный ARM Cortex M3
▫️ Аккумулятор 1650 мАч
▫️ Flash-память 32 Mb
▫️ 6-осевой гироскоп
Упаковка
Доставлялся набор курьером на дом, со склада внутри моей страны. Упаковочный пакет содержал предупреждающий знак «Хрупкий груз.» Внешний вид у непосредственно упаковки выполнен в голубых тонах. На переднем плане нарисован собранный робот-танк, на заднем же плане — погрузчик.
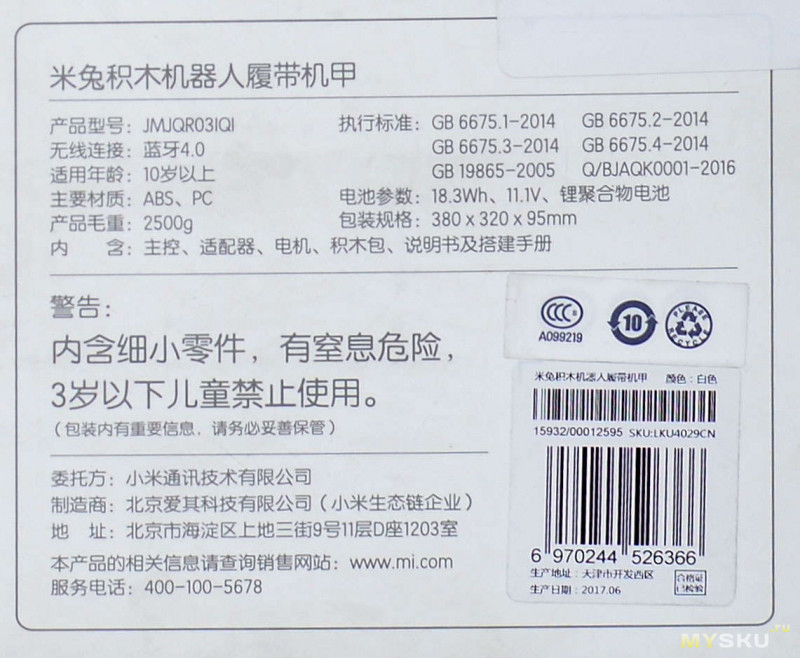
На обратной стороне видны общие характеристики. Вес 2.5кг, размеры 380х320х95мм, а также материалы, из которых изготовлен конструктор и пару технических данных.
Содержимое
Сняв верхнюю крышку, можно увить вставку из белого картона, занимающую всю площадь коробки, с круговым вырезом по центру, сквозь которое виднеется оранжевый логотип робота.
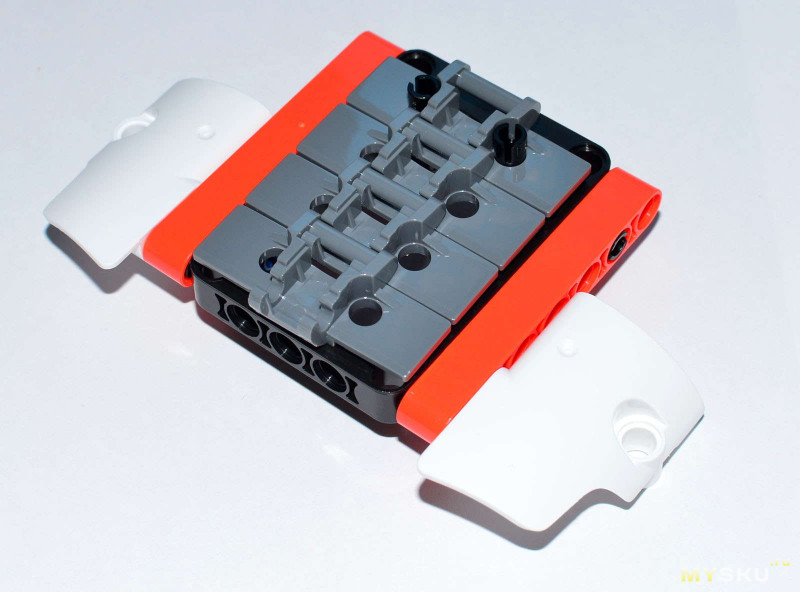
Снимаем картонку, и перед взорами предстают три основных управляющих модуля, где сосредоточена вся электроника и привод. Это блок с платой управления и аккумулятором — по центру. И два сервопривода — слева и справа
Отложим их пока в сторону и бегло осмотрим прилагающуюся макулатуру
Брошюра
Глянцевая. На ней имеется схематичное объяснение назначения деталей и разъёмов в них. Правда на китайском языке. Есть QR-код для сканирования и последующего скачивания приложения для управления роботом на смартфон.
Дополнительная информация
Руководство по сборке
Печать выполнена на глянцевой бумаге. Крайне подробно и пошагово проиллюстрировано, как и с чего начинать собирать конструктор. Цветные схематичные картинки. Приятный свежий запах отпечатанной бумаги. Разберётся даже ребёнок.
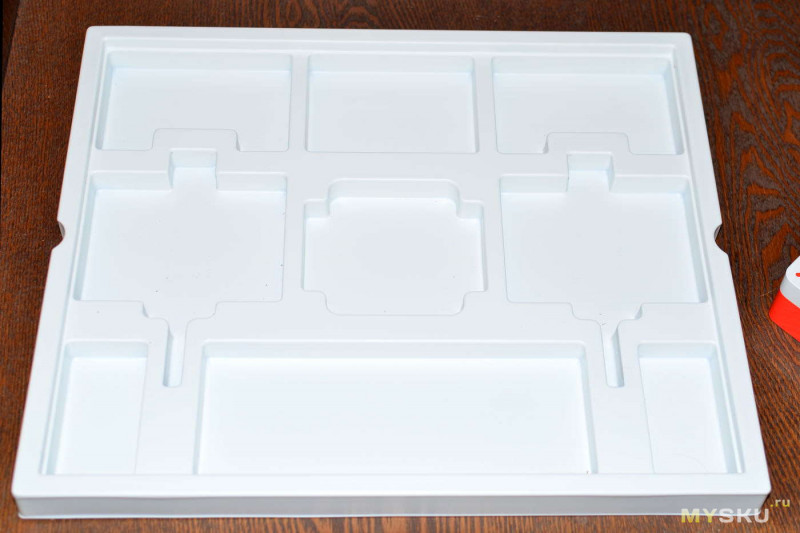
Управляющие модули лежали на крышке-подносе с 9 ячейками, в эти ячейки насыпаются отсортированные детали конструктора
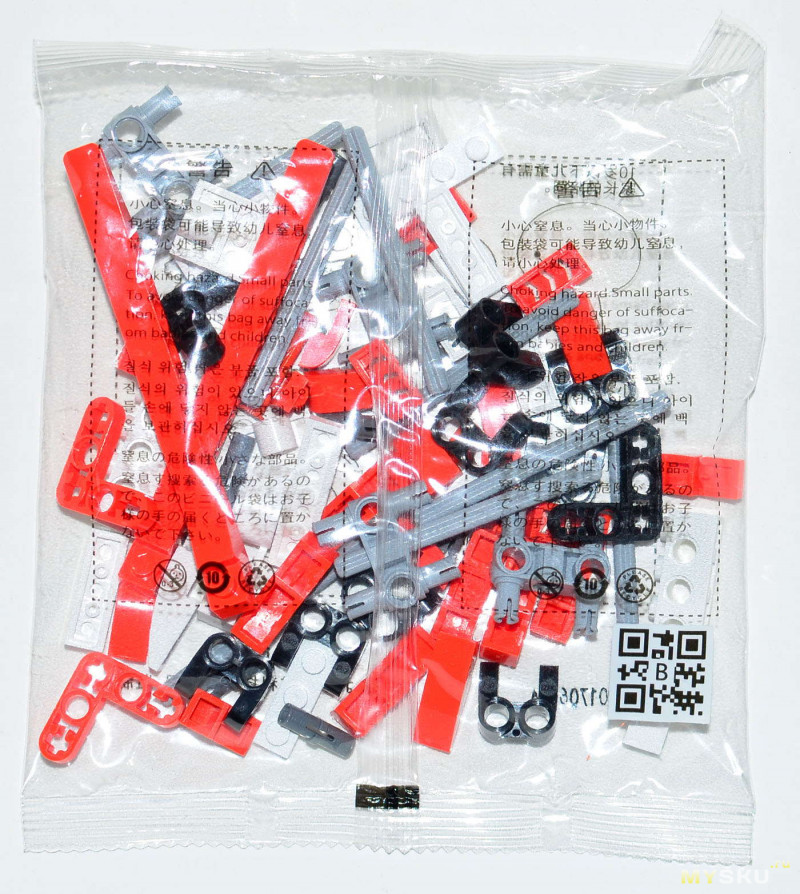
Под ней — собственно сам конструктор, расфасованный в 9 пакетиках
На каждом пакетике нанесено по QR-коду, однако отсканировать его на мятых пакетах — проблематично.
Дополнительная информация
Зарядное устройство
Прилагается, но имеет плоскую вилку. Шнур — не съёмный, длина 1 метр, тип Type C. Переходника под евровилку в комплекте небыло. Режимов работы имеет два: 5В/1А и 14В/1А, т.е. подходит как для зарядки основного модуля, так и для зарядки смартфона.
Осмотр управляющих модулей
Основной модуль
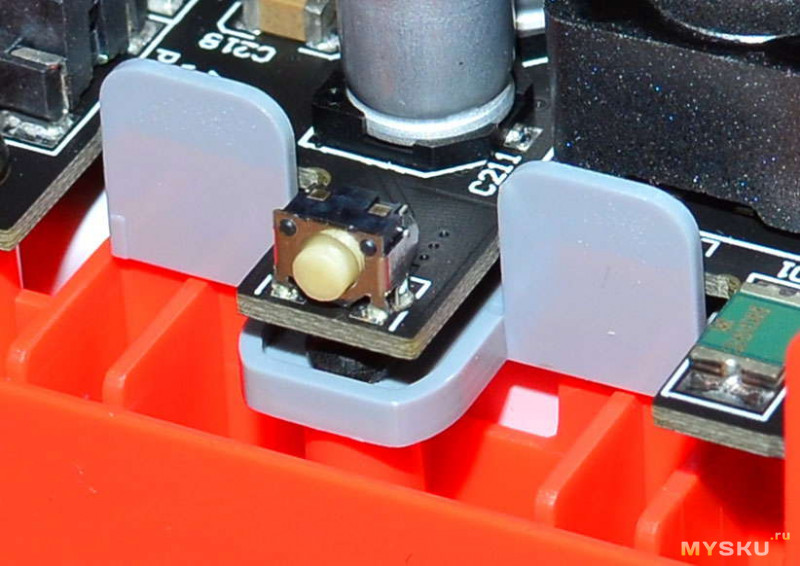
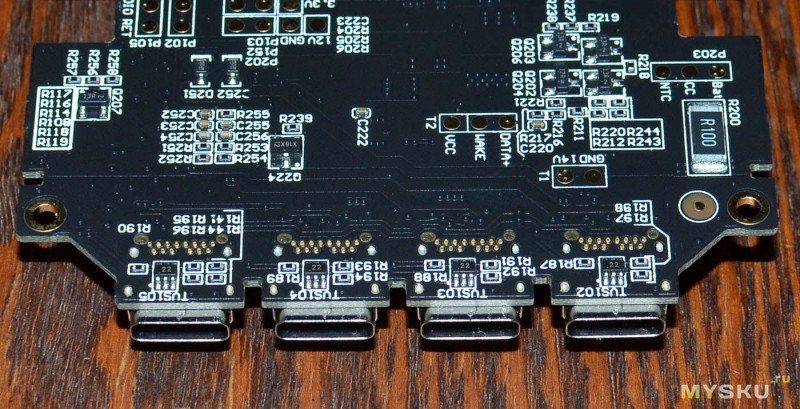
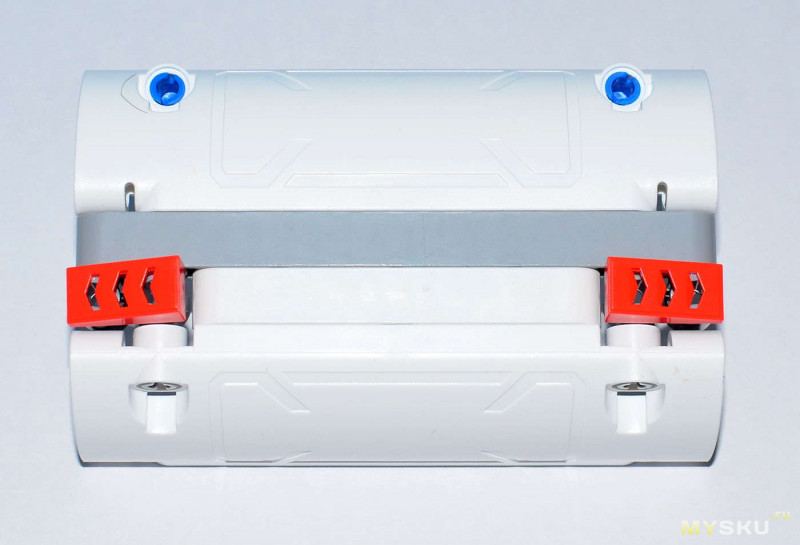
Бело-оранжевого цвета. Наверху нанесён логотип робота, рядом с котором имеются отверстия под встроенный динамик. Из органов управления — всего одна оранжевая кнопка, по однократному нажатию которой модуль включается. Пиктограмма в центре кнопки при этом загорается зелёным цветом, во время зарядки — уже красным. Над кнопкой — отверстие микрофона для голосового управления роботом. С противоположной стороны — 4 порта подключения периферии, разъёмы Type C, подписаны латинскими заглавными буквами A, B, C и D. В первые два подключаются два сервопривода, идущие в комплекте. В порт С подключается дополнительный модуль распознания цвета, который докупается отдельно.
Порт D служит для подключения комплектного зарядного устройства. Сбоку есть две симметричные Г-образные группы пазов для установки деталей конструктора. Между ними — отверстие для сброса микроконтроллера.
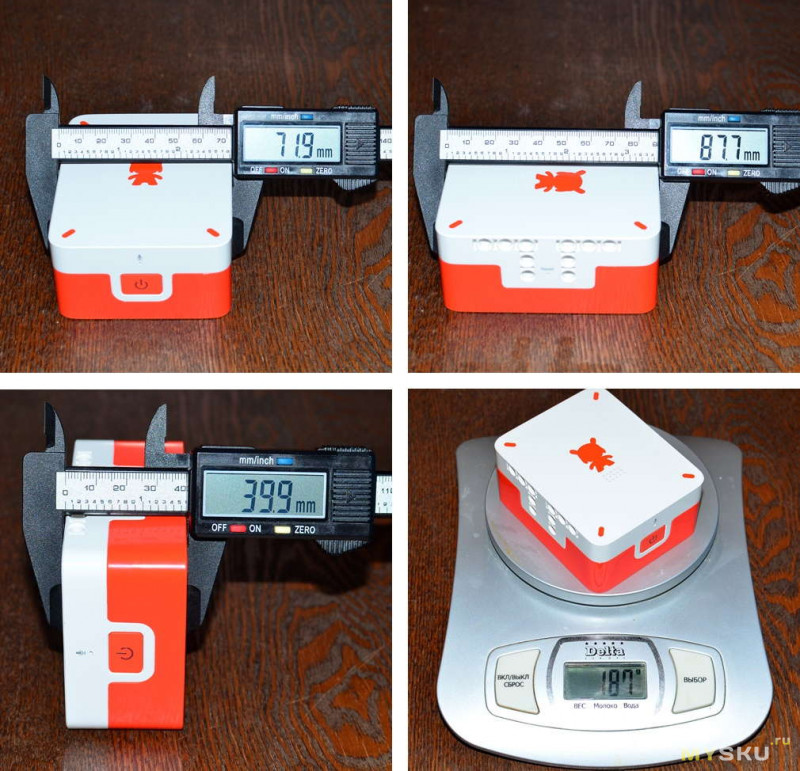
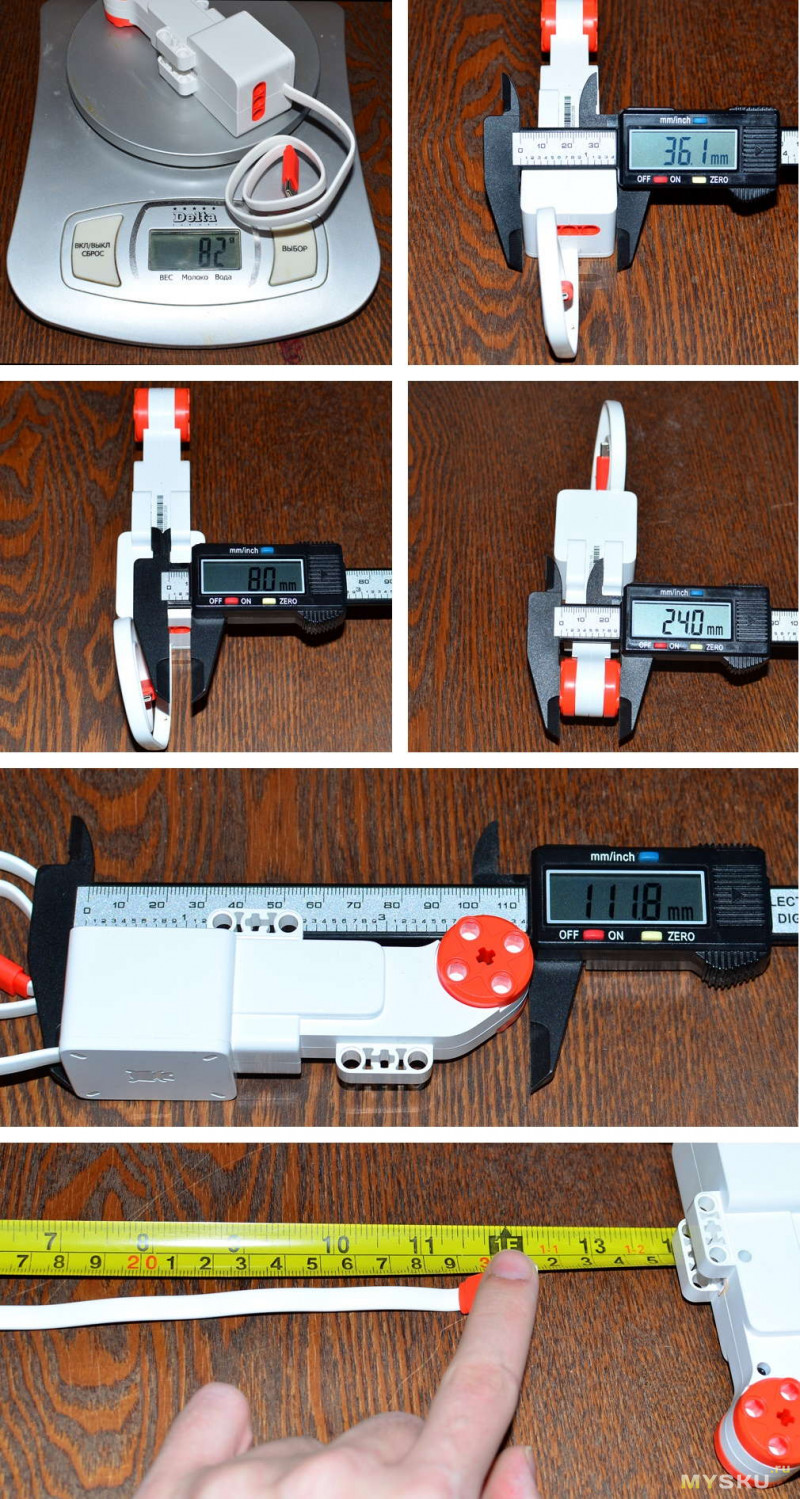
Размеры и вес основного модуля
Длина 87.7мм
Ширина 71.9мм
Высота 39.9мм
Вес 187гр
Дополнительная информация
Разбор основного модуля
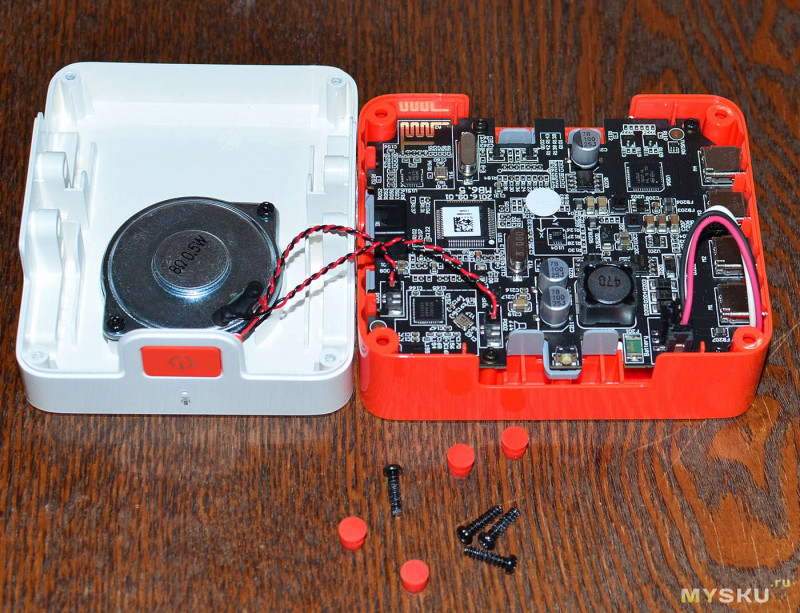
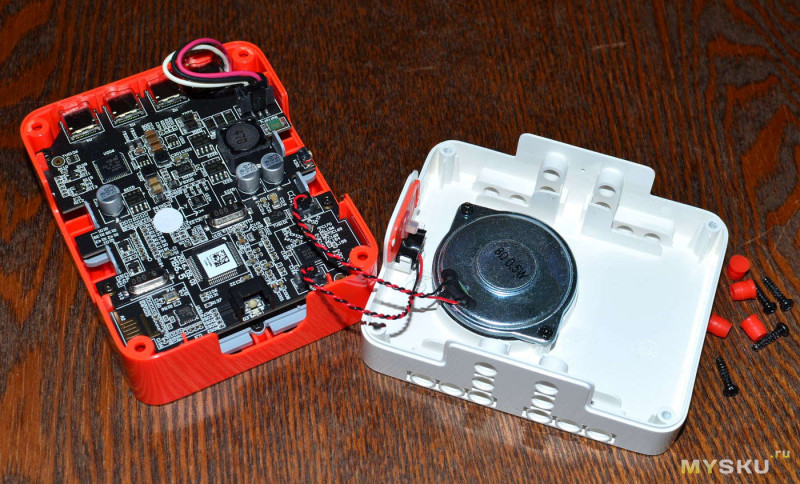
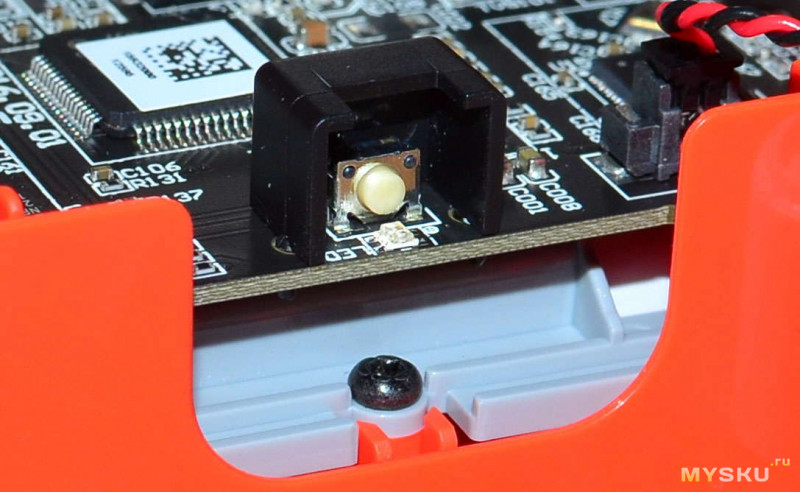
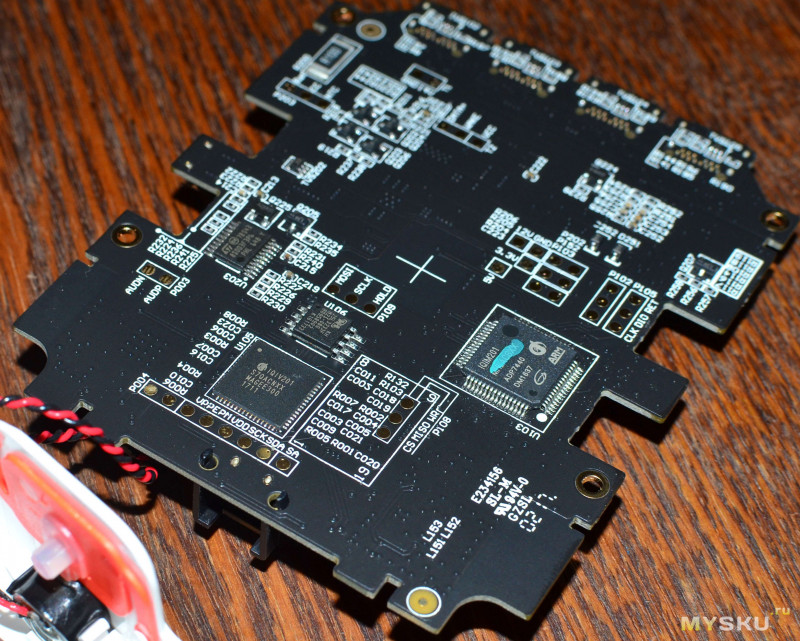
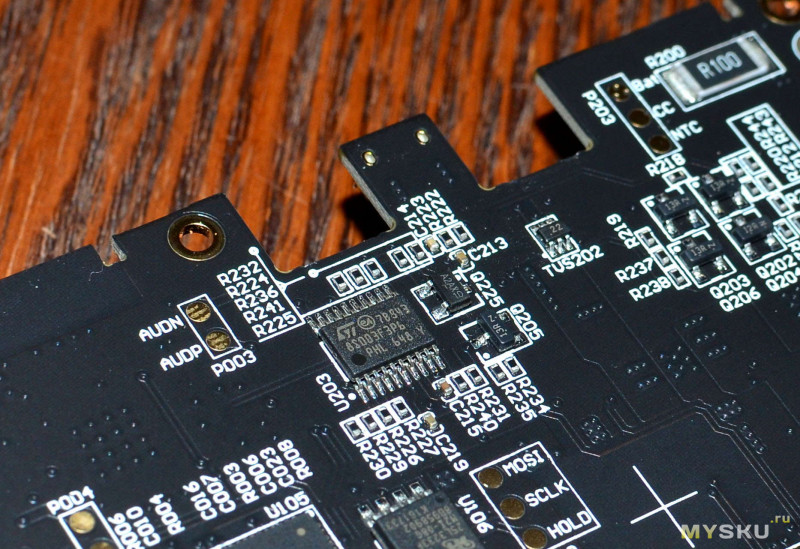
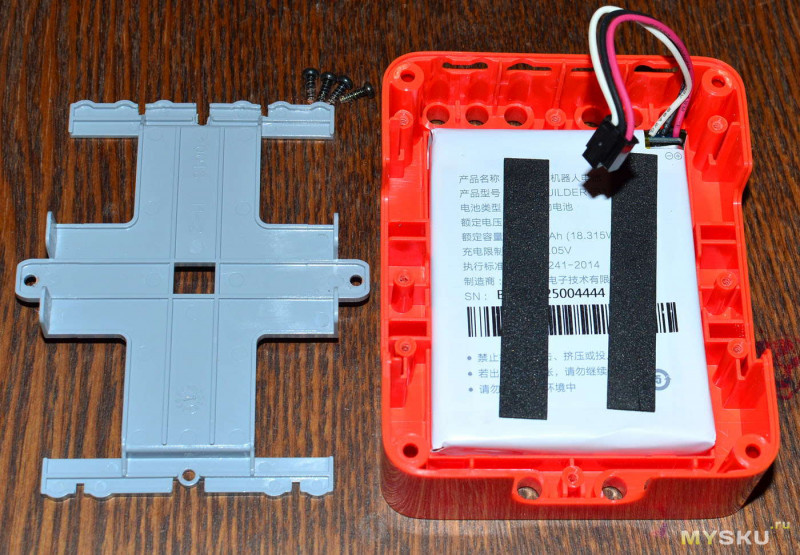
Половинки модуля скрепляются на 4-х шурупах, скрытых за оранжевыми заглушками из резины, поэтому он разбирается достаточно просто. Слева динамик, рядом же с ним — микрофон. Сама же плата выполнена качественно, покрыта матовой чёрной маской.
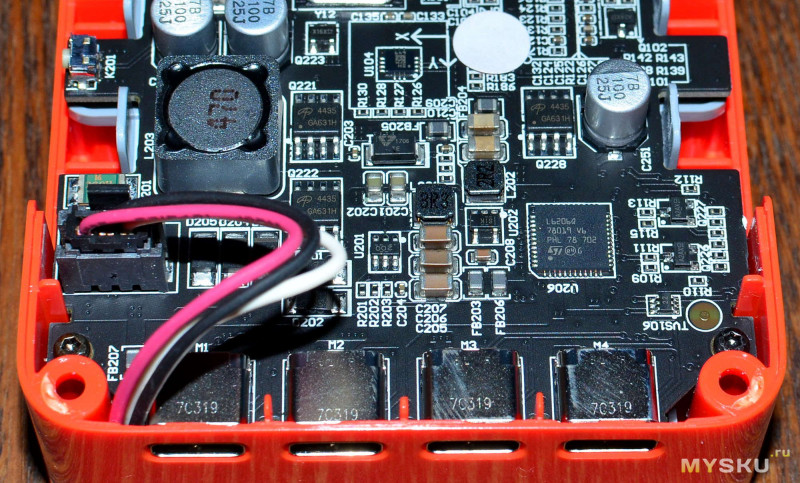
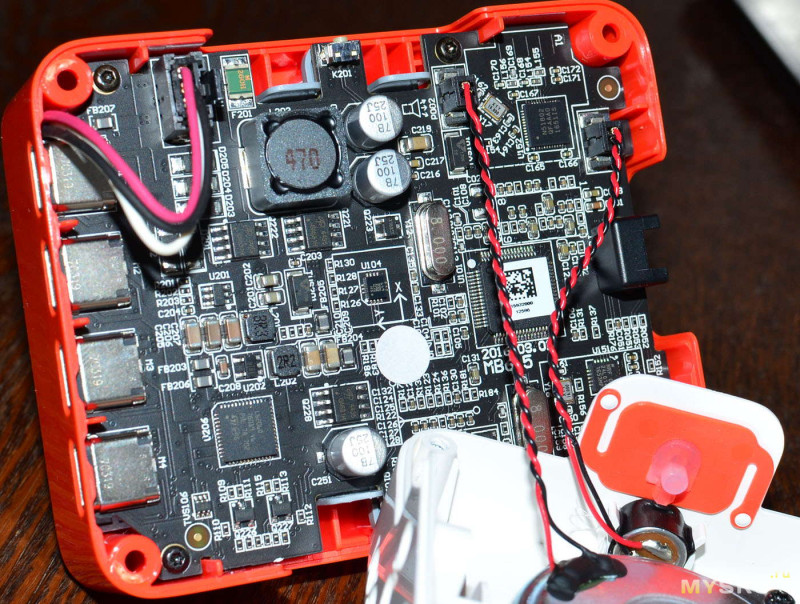
Драйвер двигателя выполнен на L6206Q
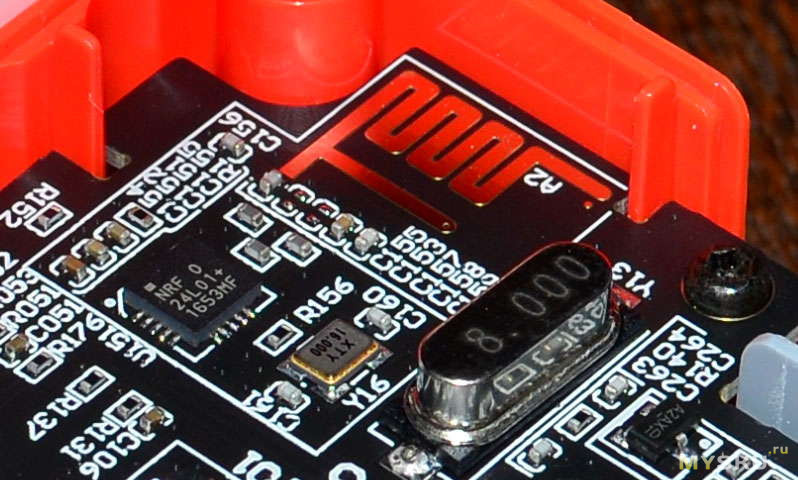
Радиомодуль 2.4ГГц NRF24L01, со скоростью передачи данных до 2 мегабит
Микросхема FLASH-памяти 25l3233F
Имеется также 8-битный контроллер STM8S003
Дополнительная информация
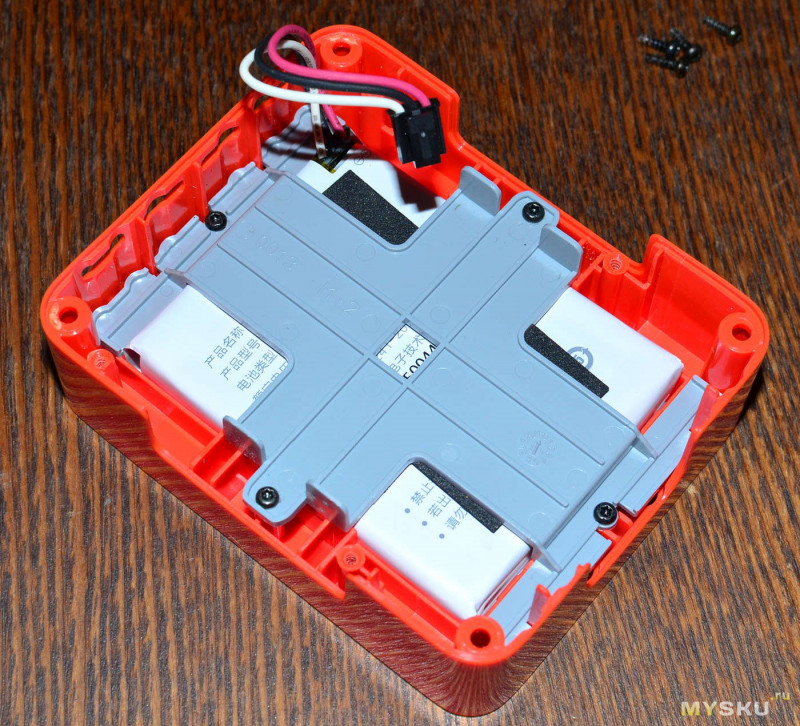
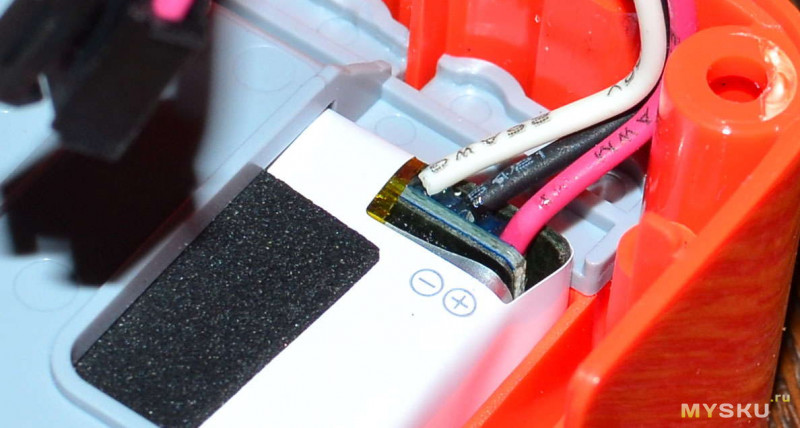
Под платой за фиксирующей крестовиной из пластика находится собственно литиевый аккумулятор, который судя по номинальному напряжению 11.1В — трёхбаночный. От него на плату уходит три вывода В аккумуляторе под оболочкой есть бутерброд из электроники. Ёмкость аккумулятора 1650мАч
Дополнительная информация
.
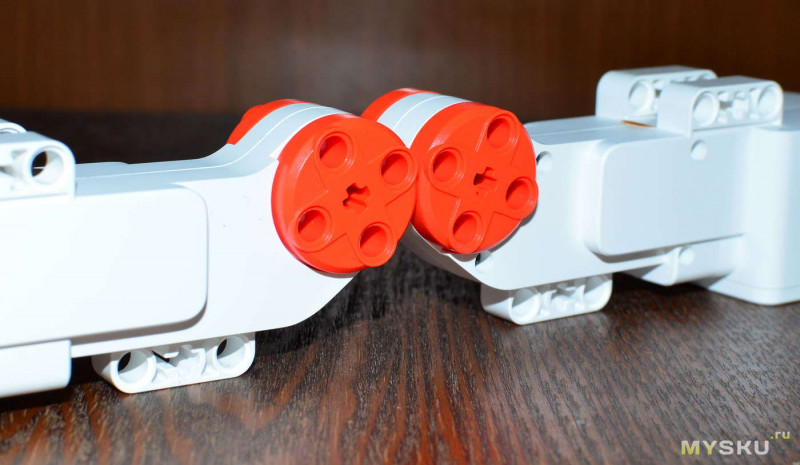
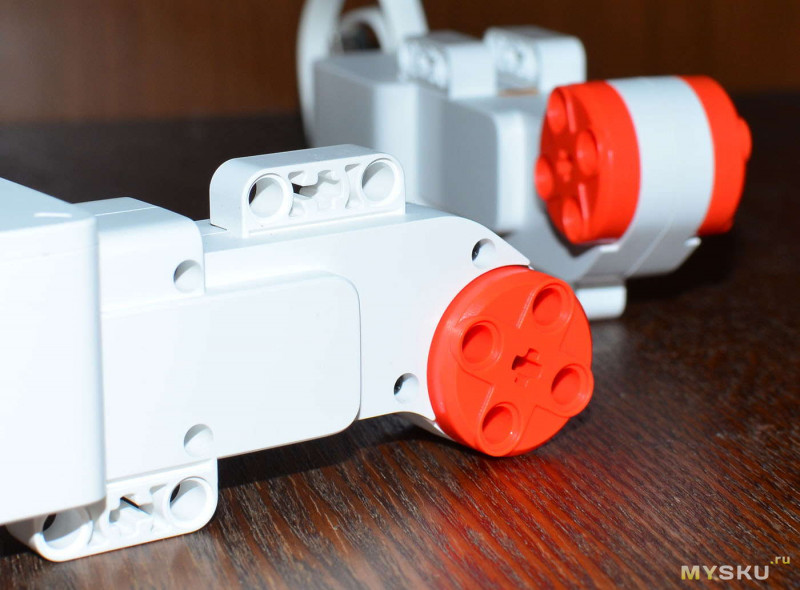
Сервоприводы
Оба — абсолютно одинаковые. Имеют продолговатую форму. С одного конца располагается приводное колесо с неглубокими отверстиями крестовой формы. От другого же конца отходит плоский кабель Type C, длина которого 29 см. Кабель довольно плотный. Хлипким его точно не назовёшь. На корпусе также имеются пазы под конструктор, а также наклейки с серийным номером.
Размеры и вес одного сервопривода
Длина 111.8мм
Ширина 36мм
Длина кабеля 29см
Вес 82гр
Дополнительная информация
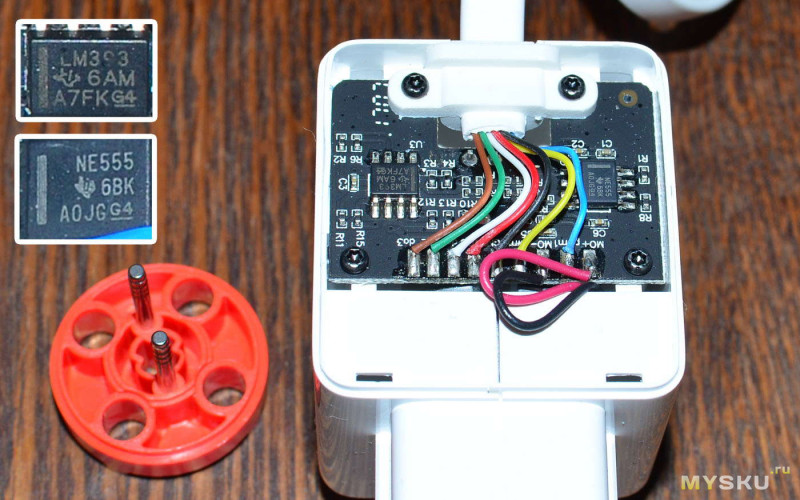
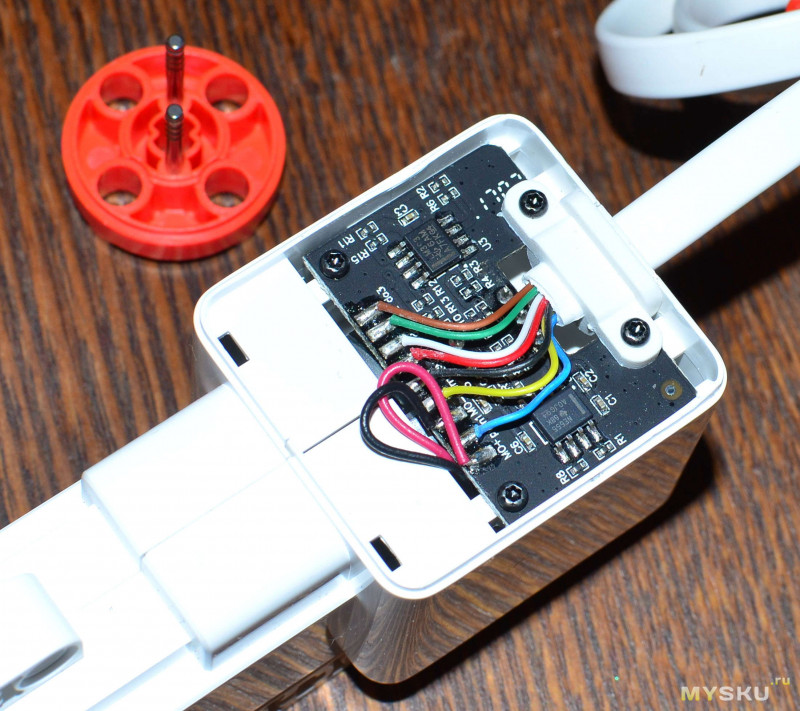
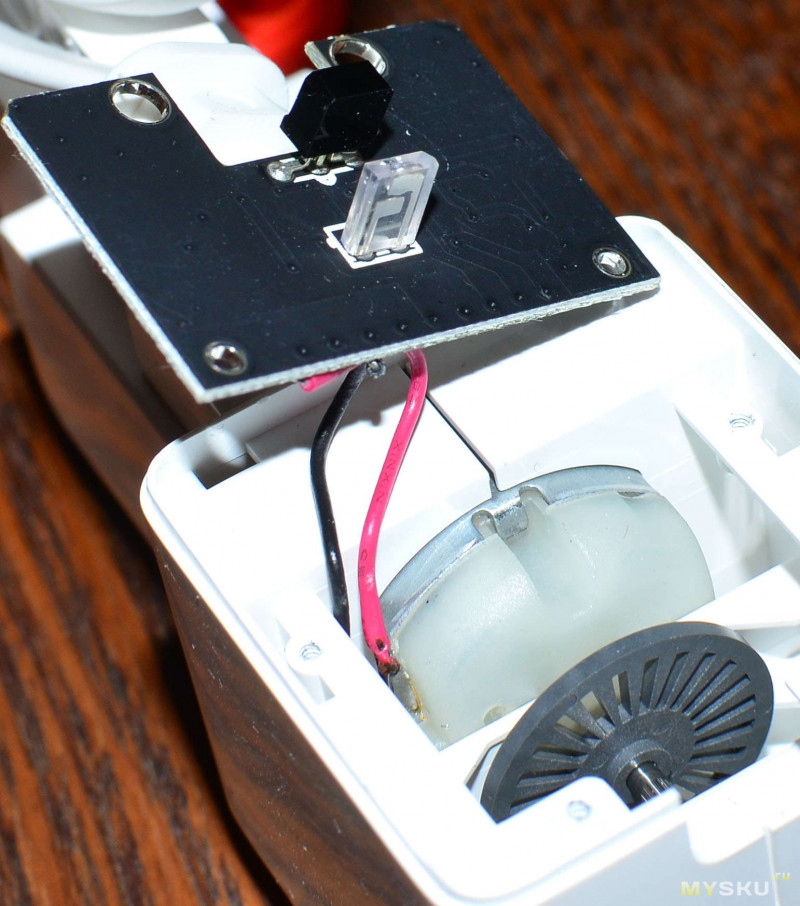
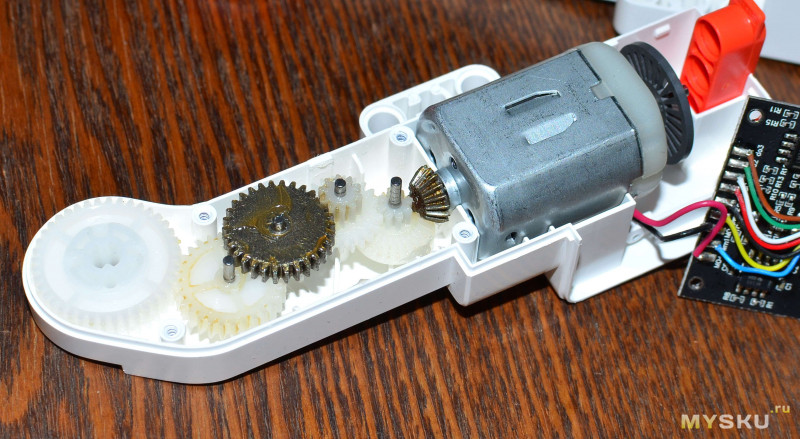
Разбор одного сервопривода
Заметно труднее разобрать этот модуль, поскольку простого откручивания 4-х шурупов здесь уже не достаточно. Помимо этого нужно отделить половинки приводного колеса и, самое сложное — снять белую крышку, которая держится на защёлках.
Из микросхем внутри — компаратор на LM393 и таймер 555
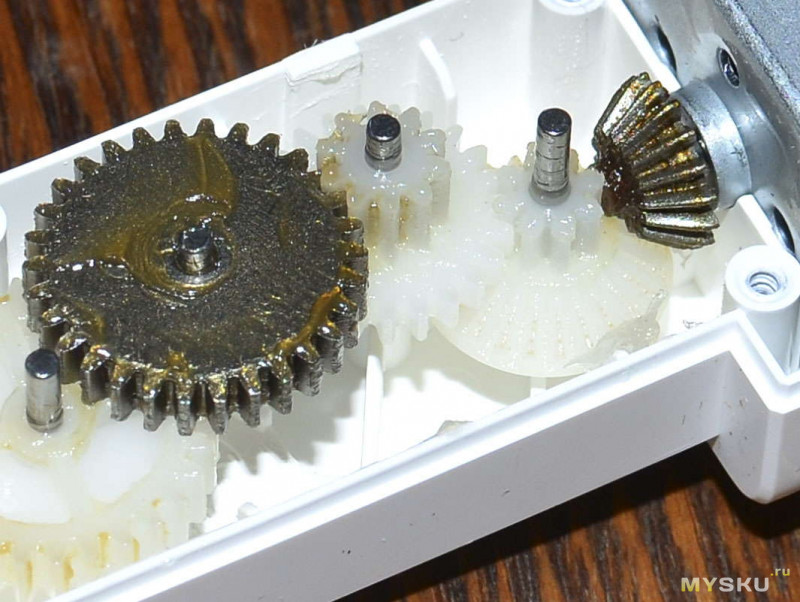
В системе шестерёнок — две металлические, одна на валу моторчика. Скорость вращения контролируется оптопарой.
Дополнительная информация
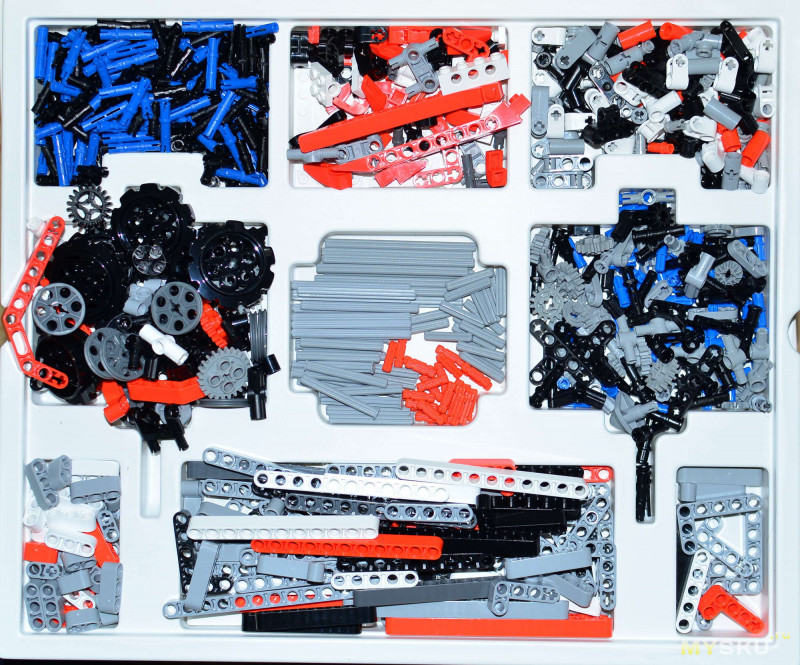
Комплектующие
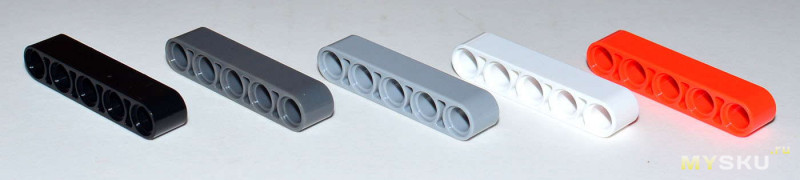
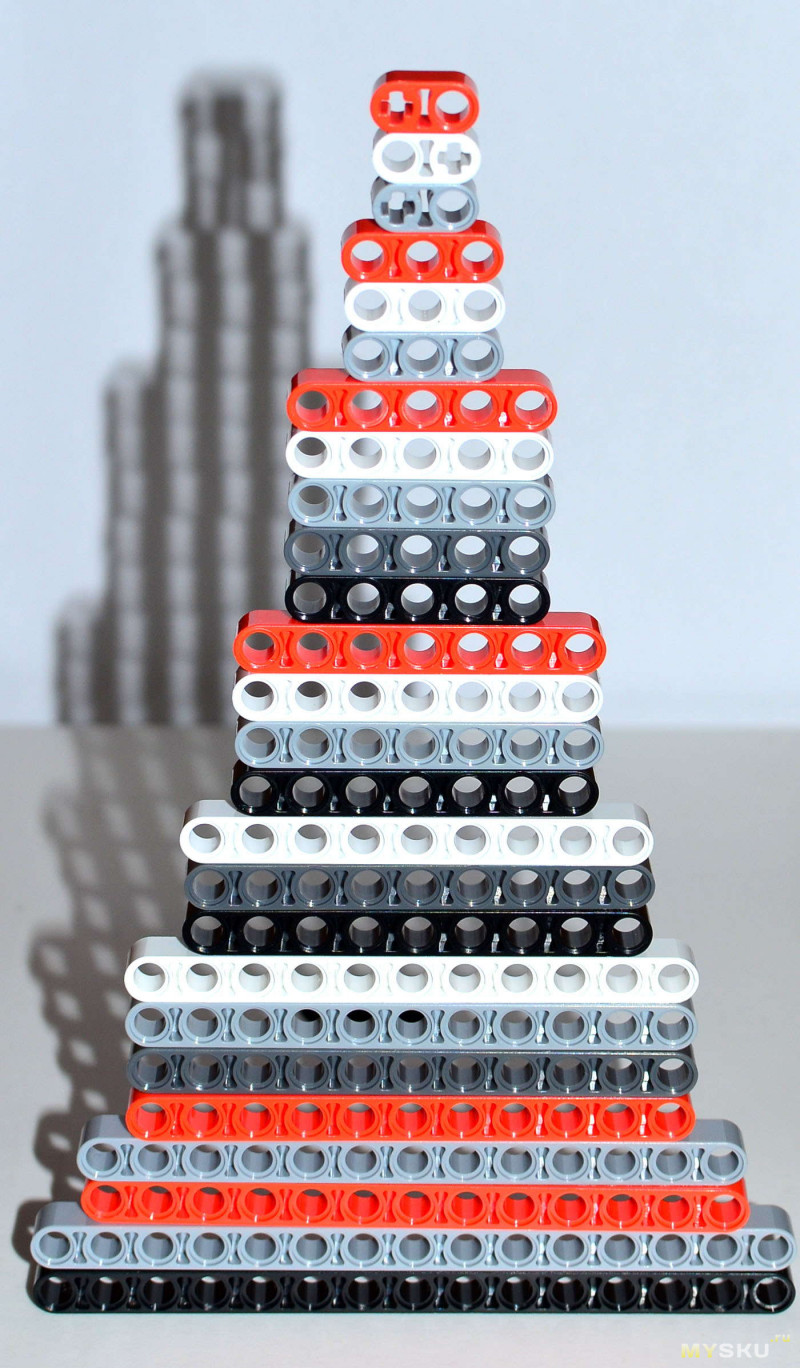
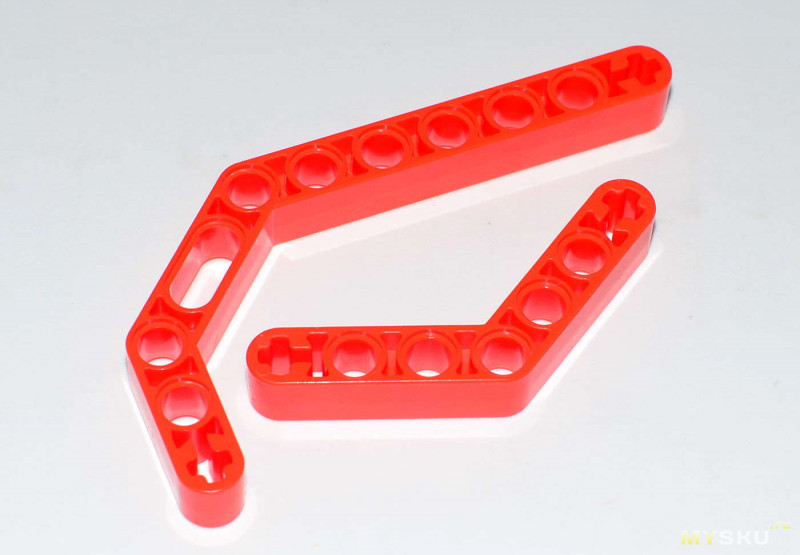
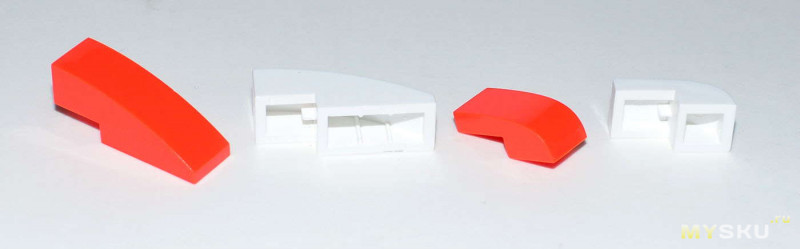
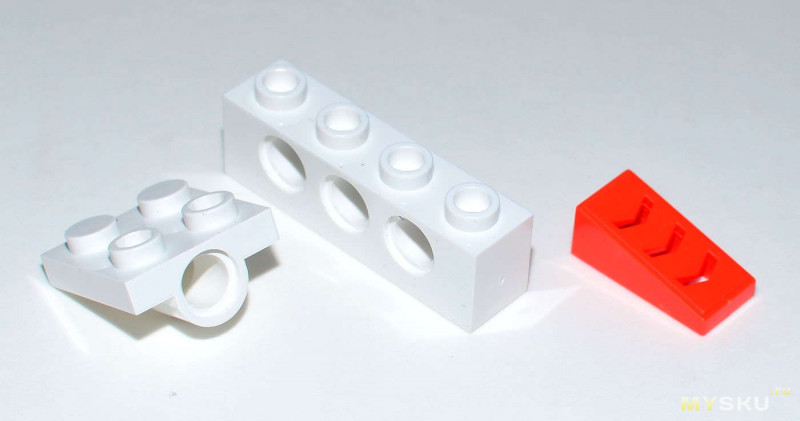
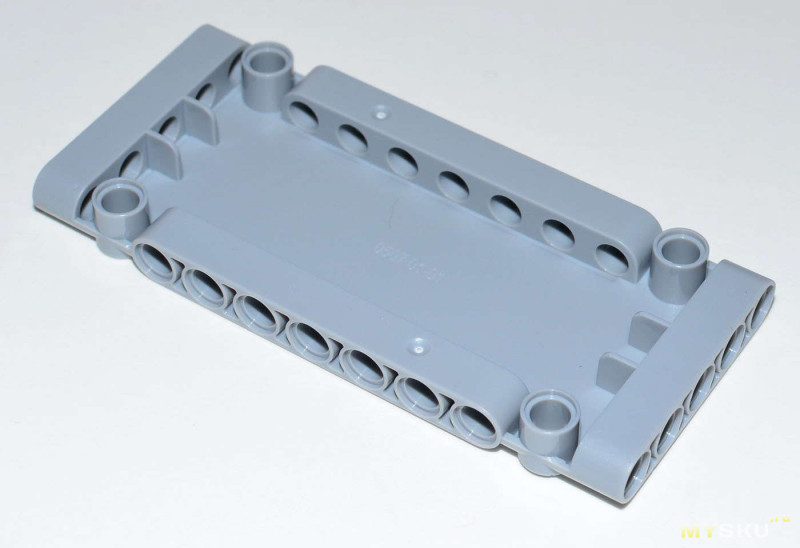
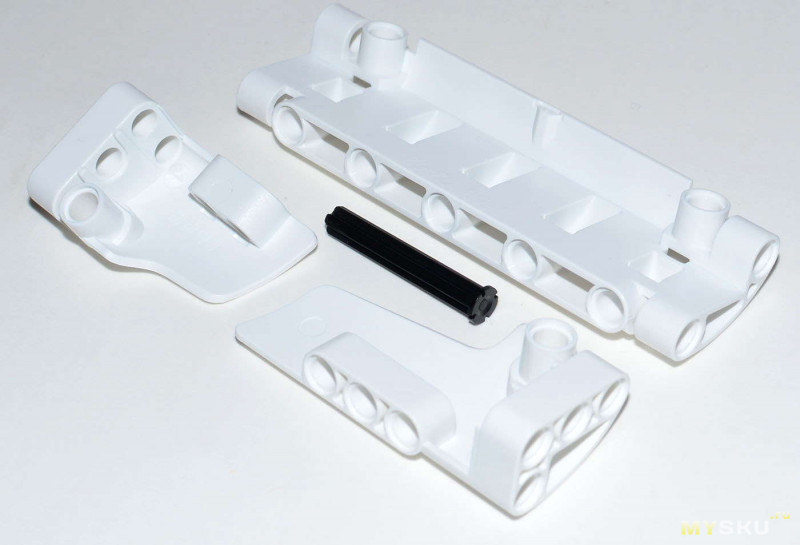
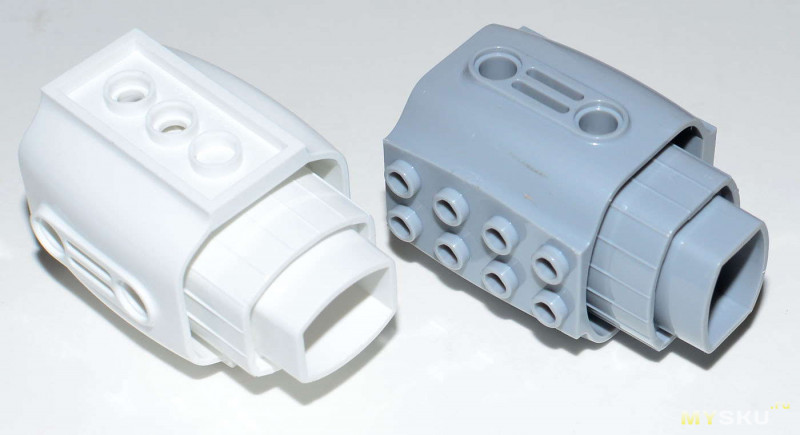
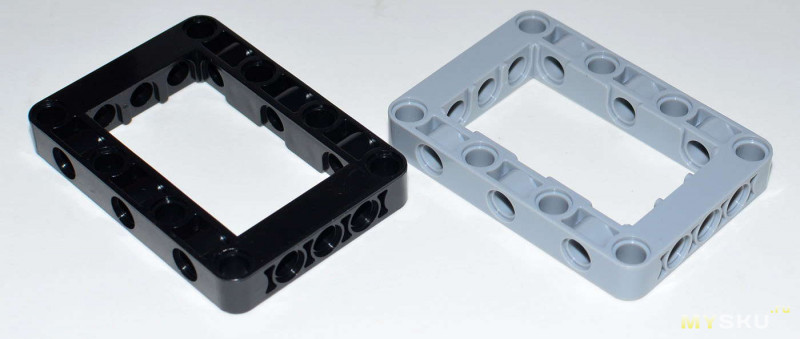
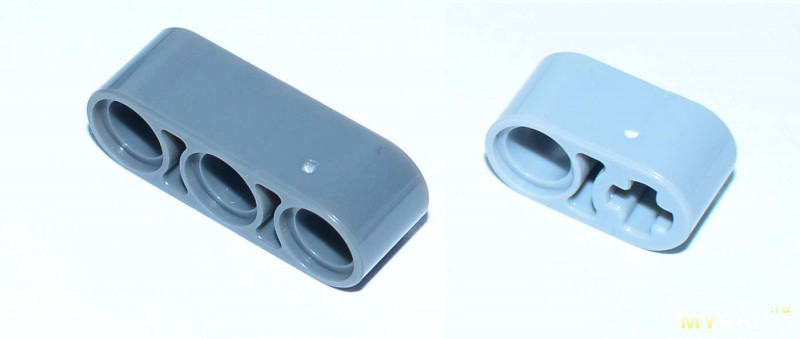
Самая многочисленная часть. 1086 деталей. При ближайшем рассмотрении можно увидеть, насколько качественно они выполнены. Всего используется 6 цветов — черный, белый, оранжевый, светло-серый, тёмно-серый, и синий. Рассмотрим их поближе.
Дополнительная информация
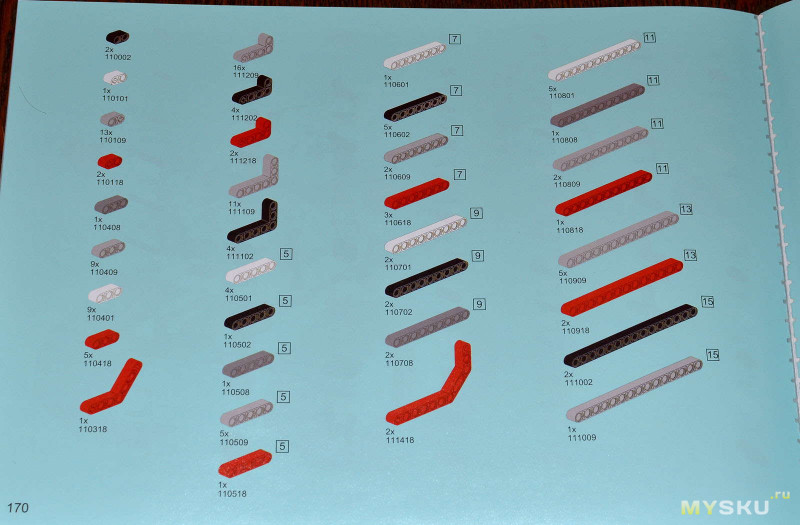
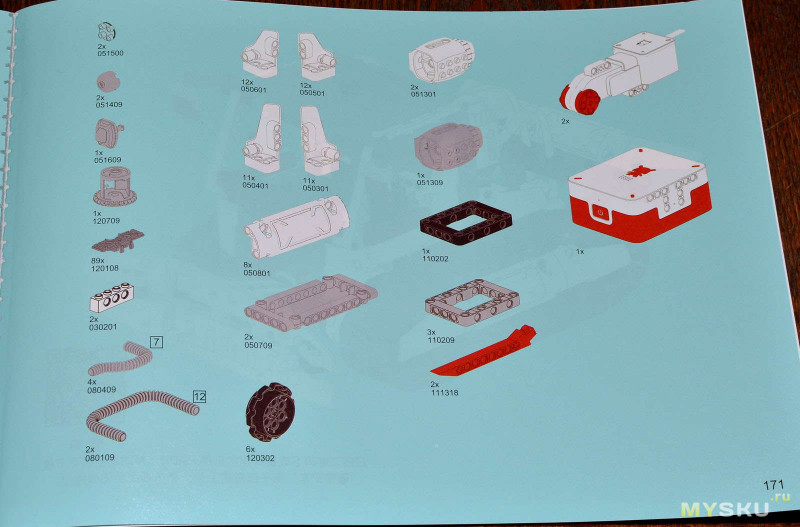
Сводка из руководства: сколько каких деталей есть в наличии
Сборка
Дополнительная информация
Предварительно я немного рассортировал детали по ячейкам таким образом
Все не поместились, поэтому остальная часть, в основном обшивка и звенья гусеничной ленты, осталась лежать неподалёку
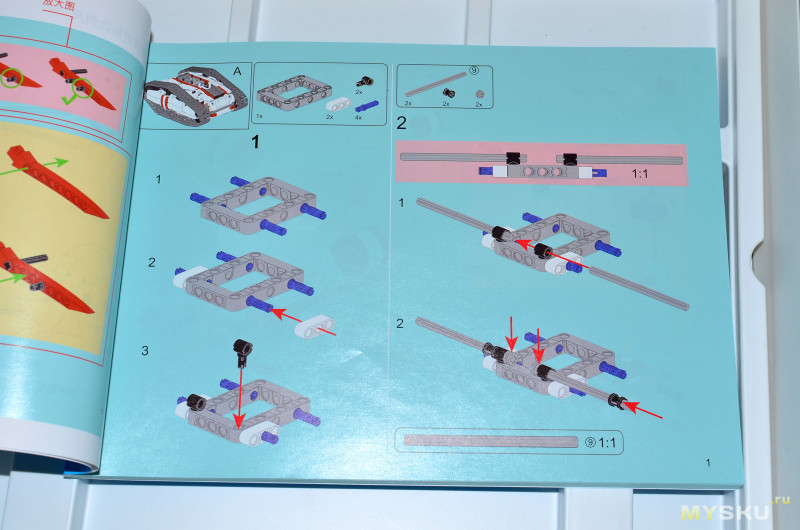
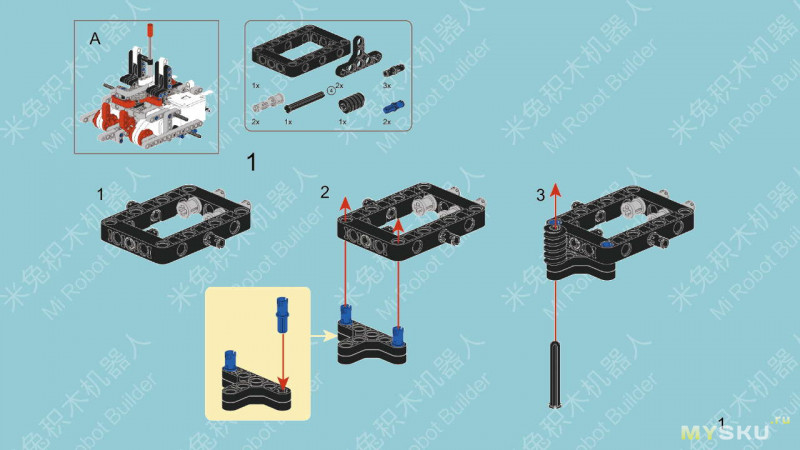
Открываем первую страницу инструкции. На мини картинке слева наверху обозначено, что мы будем собирать шасси танка. В двух рамках чуть правее нарисованы необходимые на данном этапе детали и их количество.
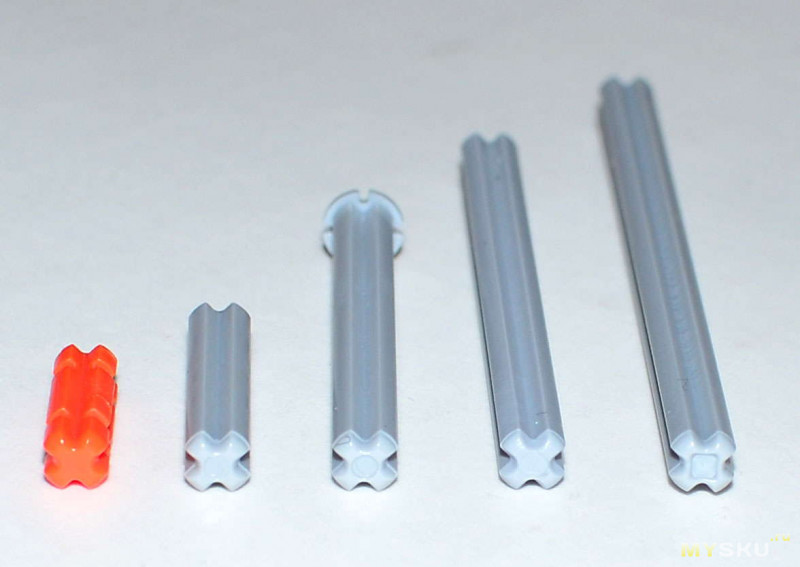
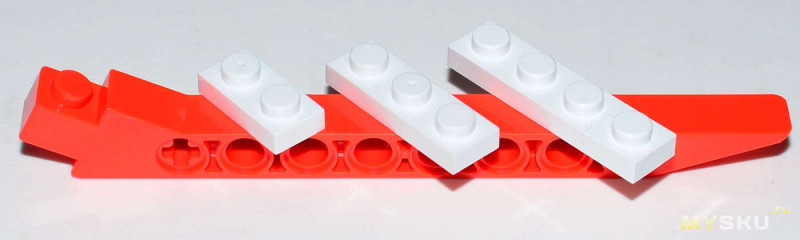
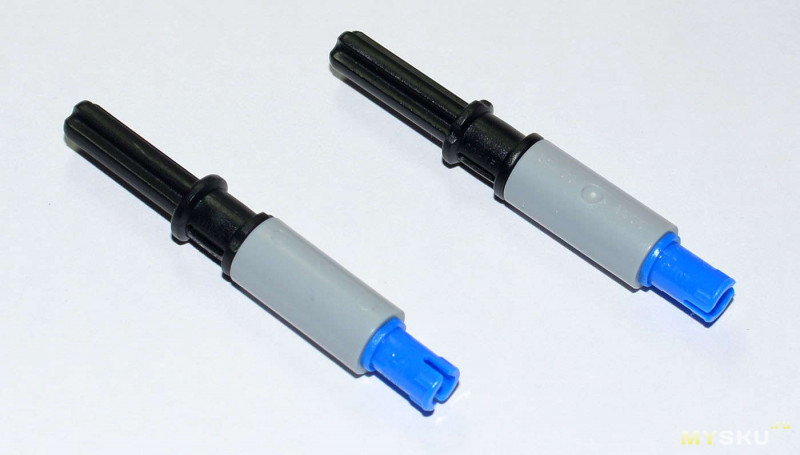
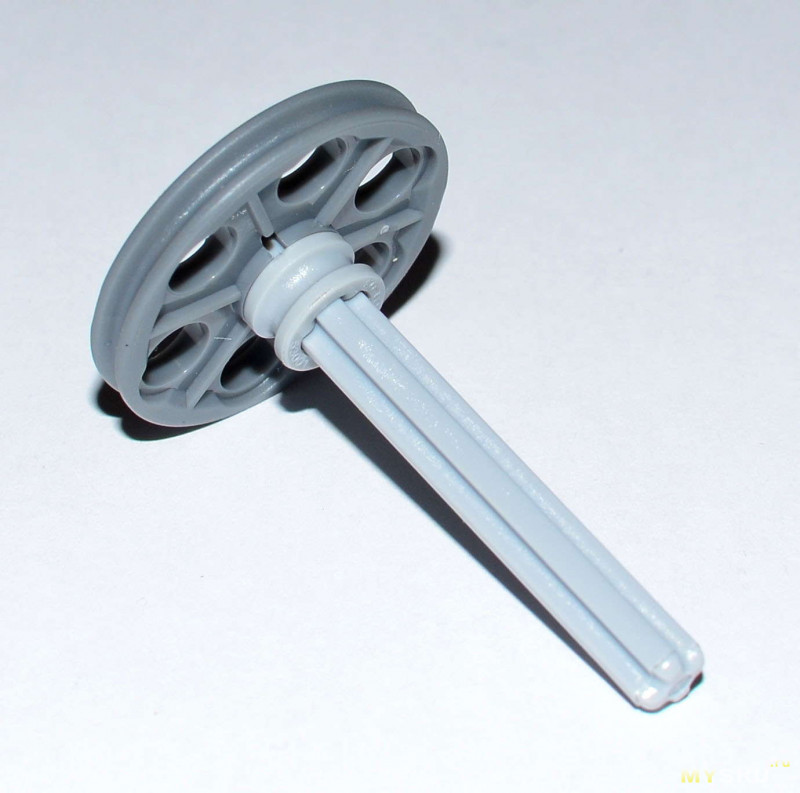
Но когда ручонки тянутся к длинному крепёжному стержню светло-серого цвета, то в какой-то момент не совсем понятно, а какой длины его подбирать. На этот случай внизу той же страницы нарисована другая рамка с деталью масштабом 1:1, для прикладывания стержня уже к нему, чтобы не ошибиться. Причём обратите внимание, стержни эти бывают как простые
так и с шляпкой на конце, на рисунке и в реальности это отчётливо видно
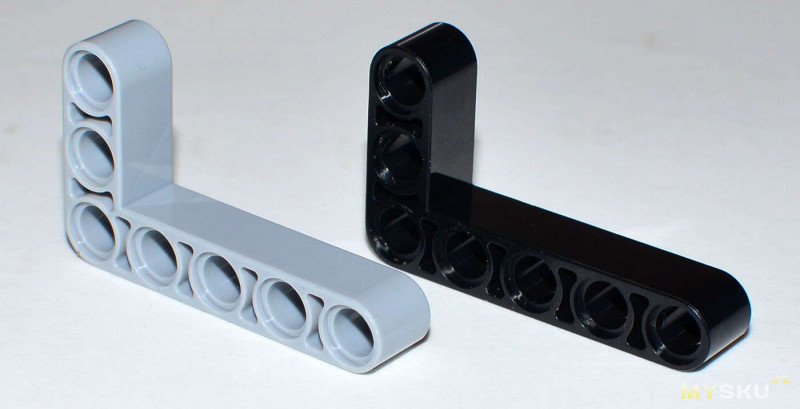
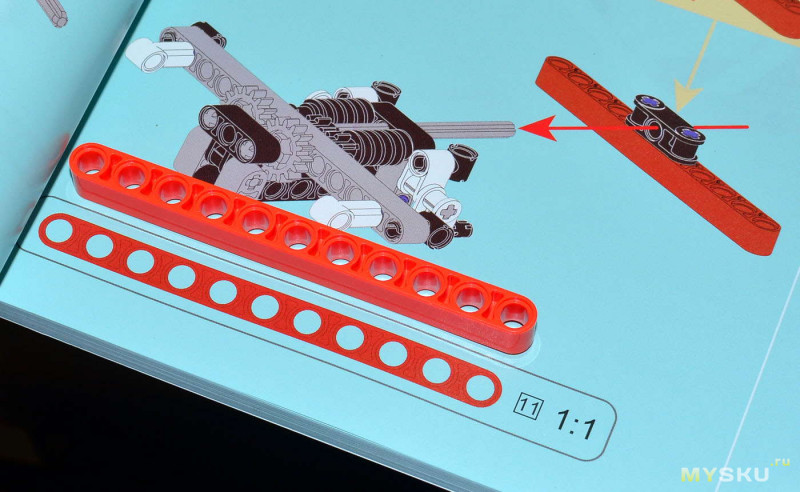
подобные масштабные рисунки будут попадаться и для балок со сквозными отверстиями, хотя дополнительно будет указываться число этих самых отверстий
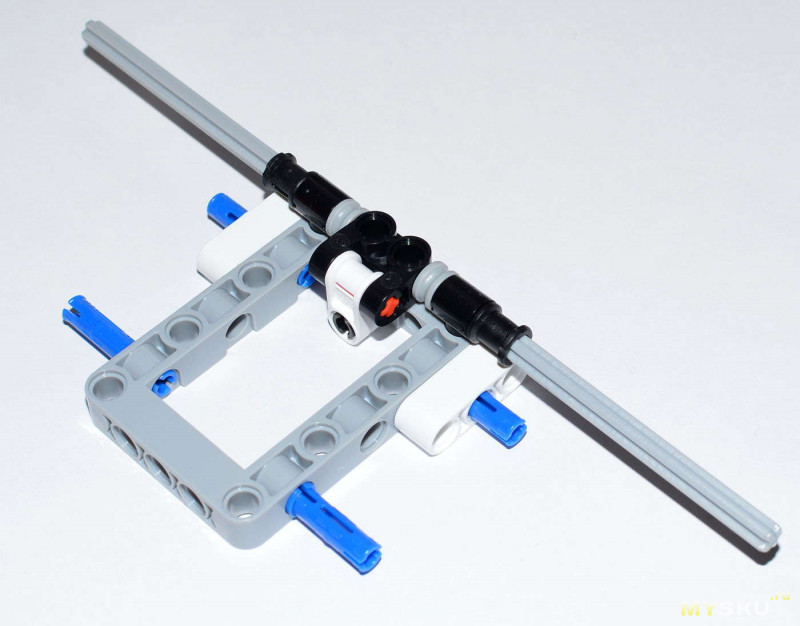
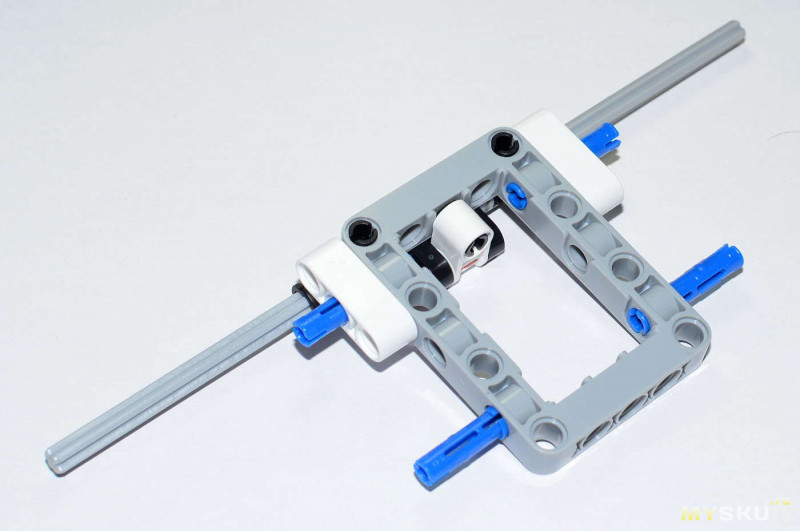
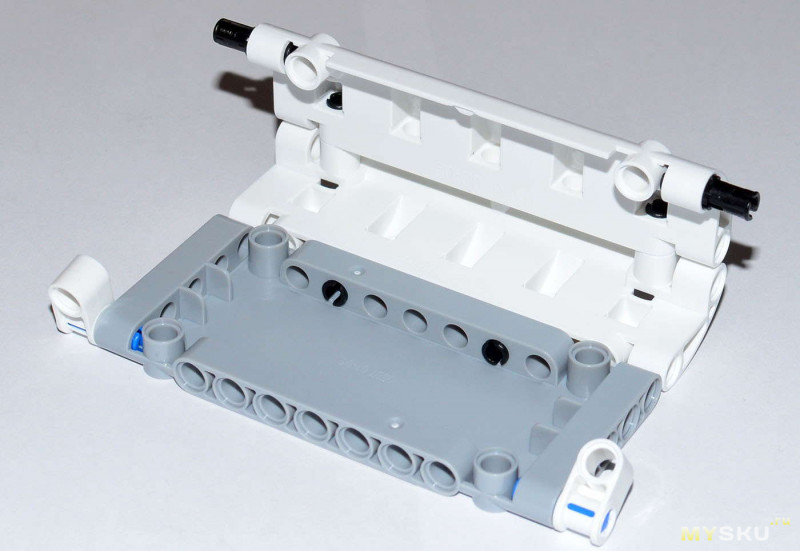
Теперь по образу и подобию начинаем потихоньку собирать шасси танка
Попутно — узлы трансмиссии
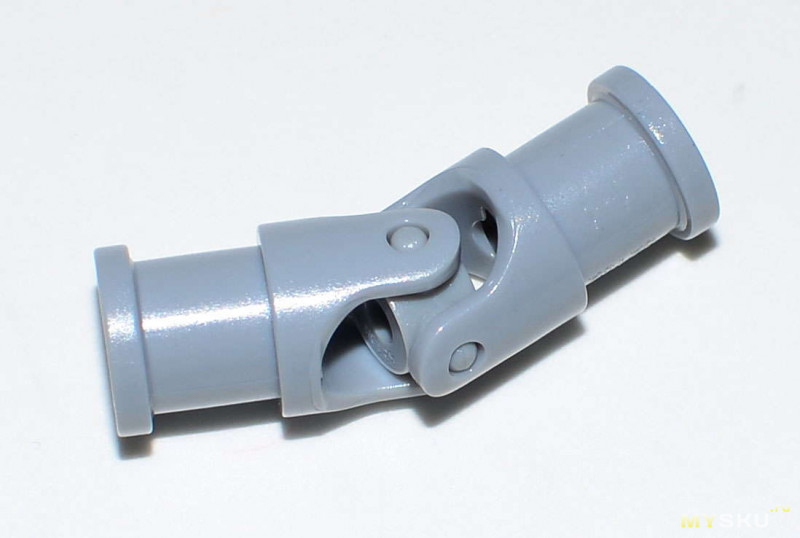
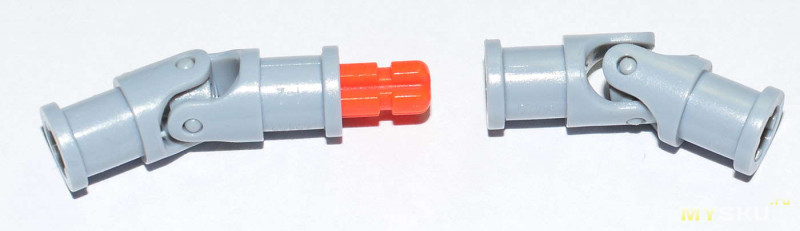
Цепляем карданный вал
Прикрепляем сервоприводы
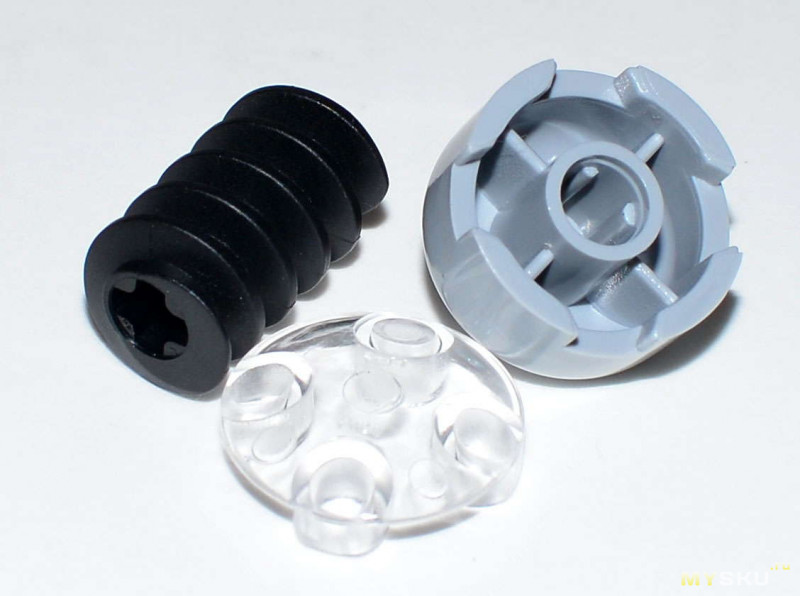
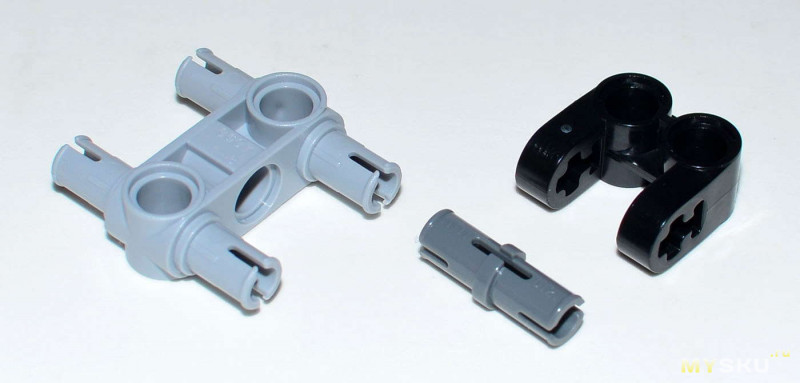
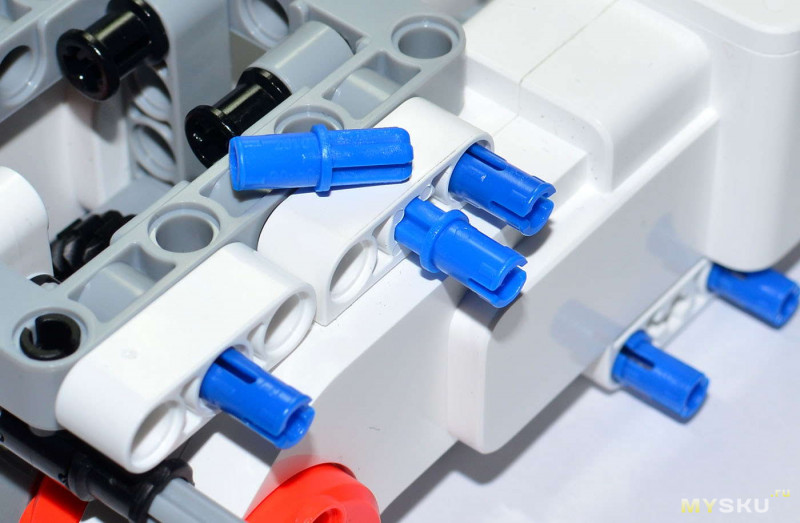
В отверстия сервоприводов с двух сторон помещаем крепёжные втулки синего цвета, — одна из самых многочисленных деталей в наборе
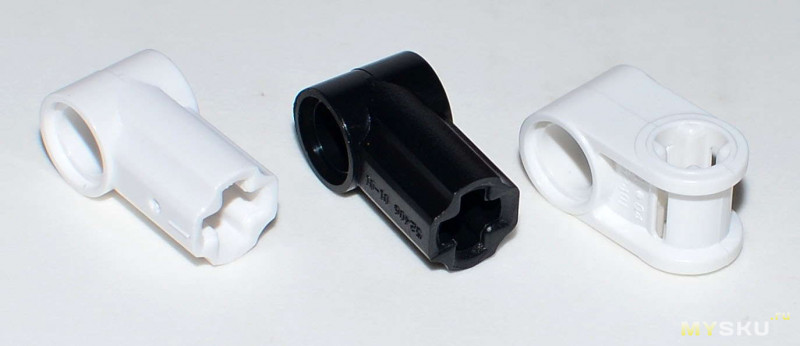
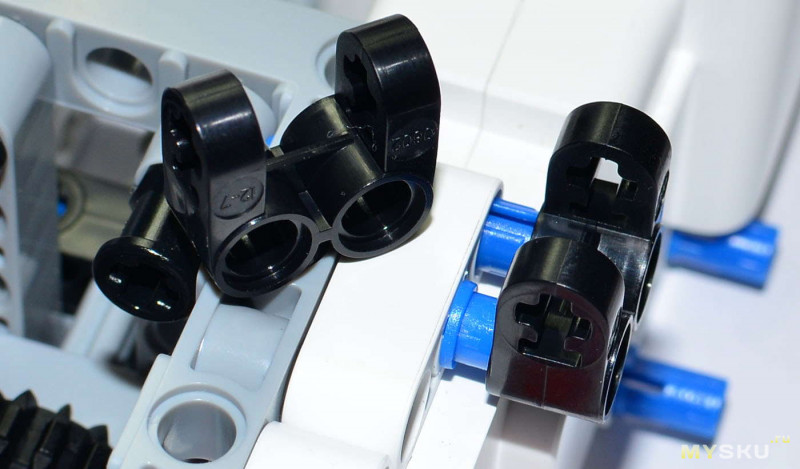
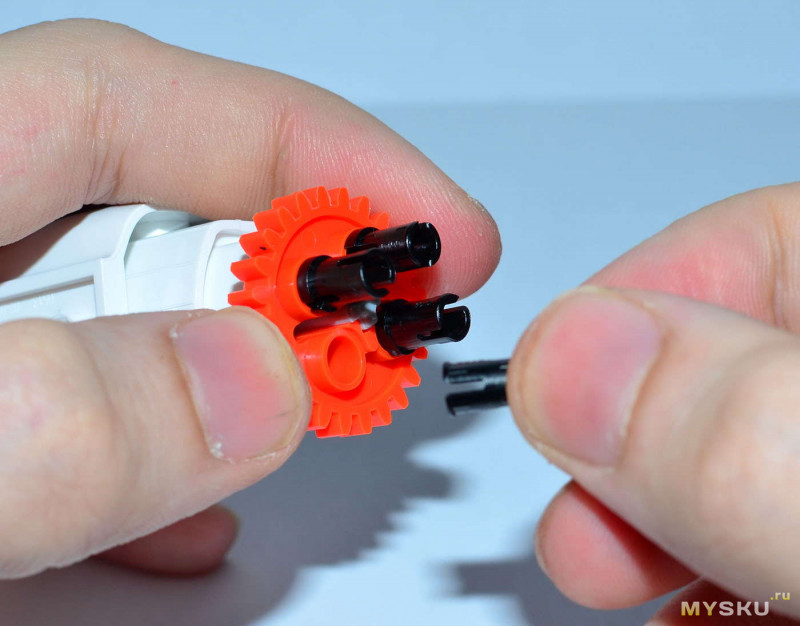
Чёрные крепёжные втулки, которых тоже очень много
Нередко придётся делать составные втулки вроде этих
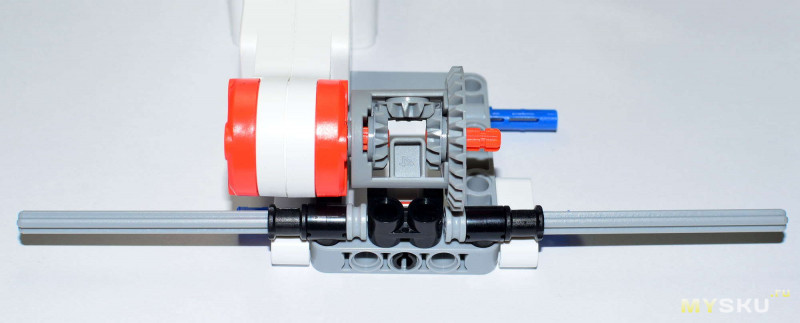
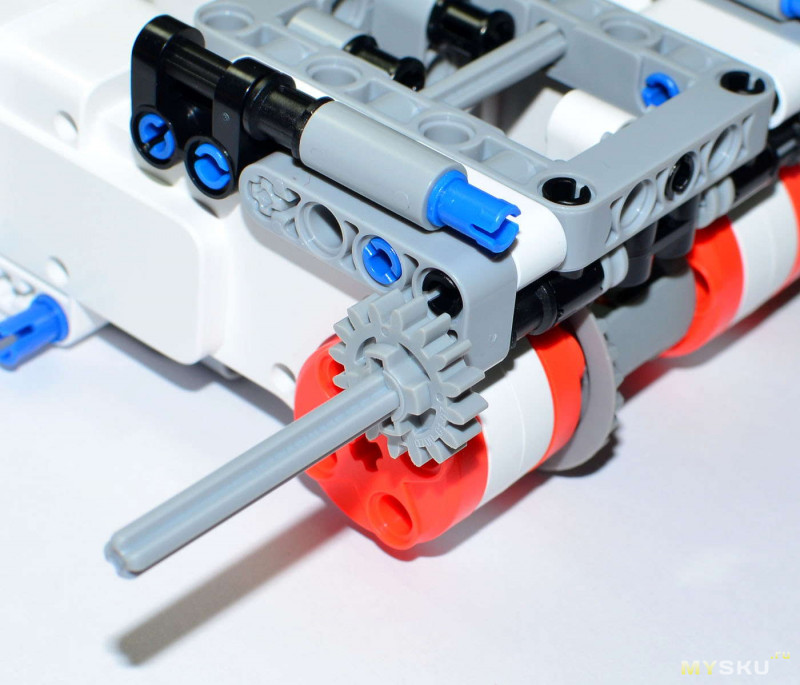
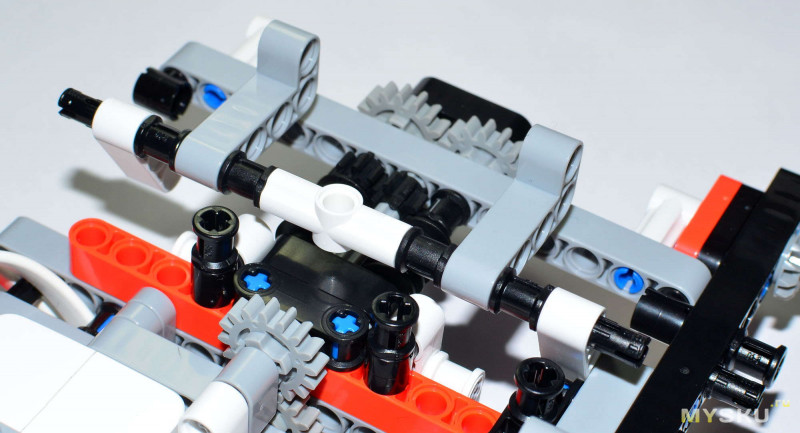
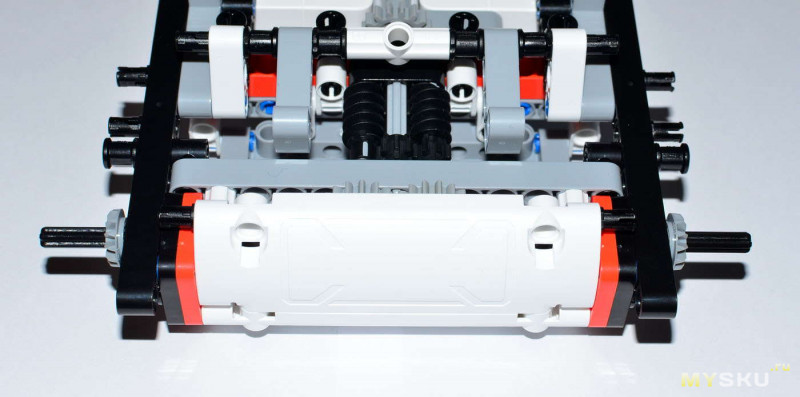
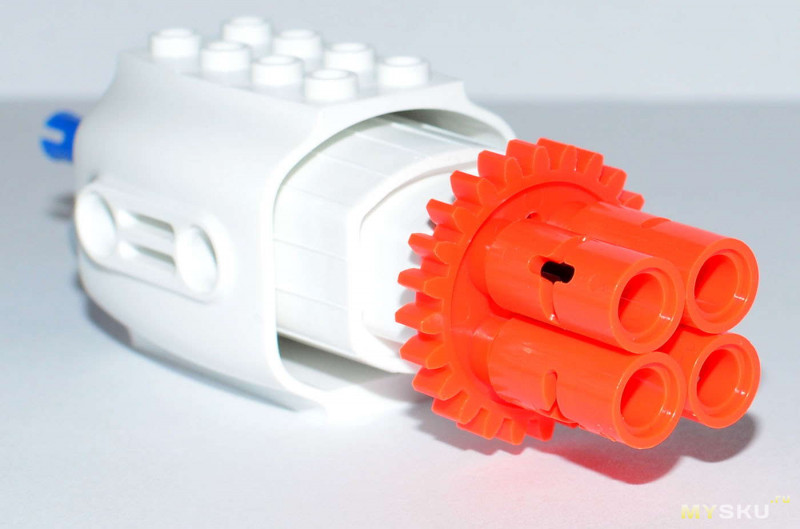
На стержни надеваем шестерёнки с двух сторон
Удлиняем карданный вал за счёт стержня
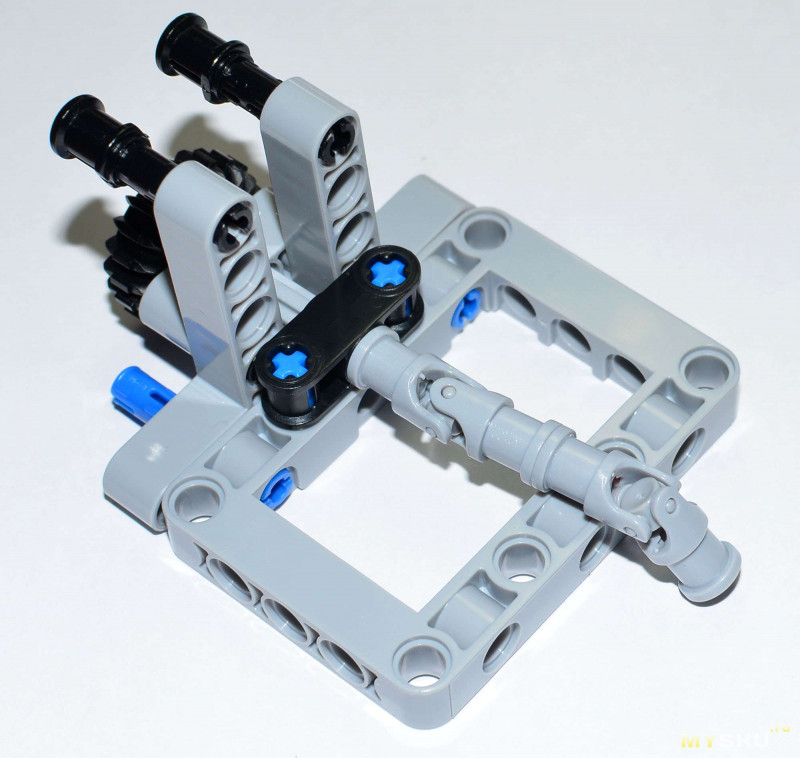
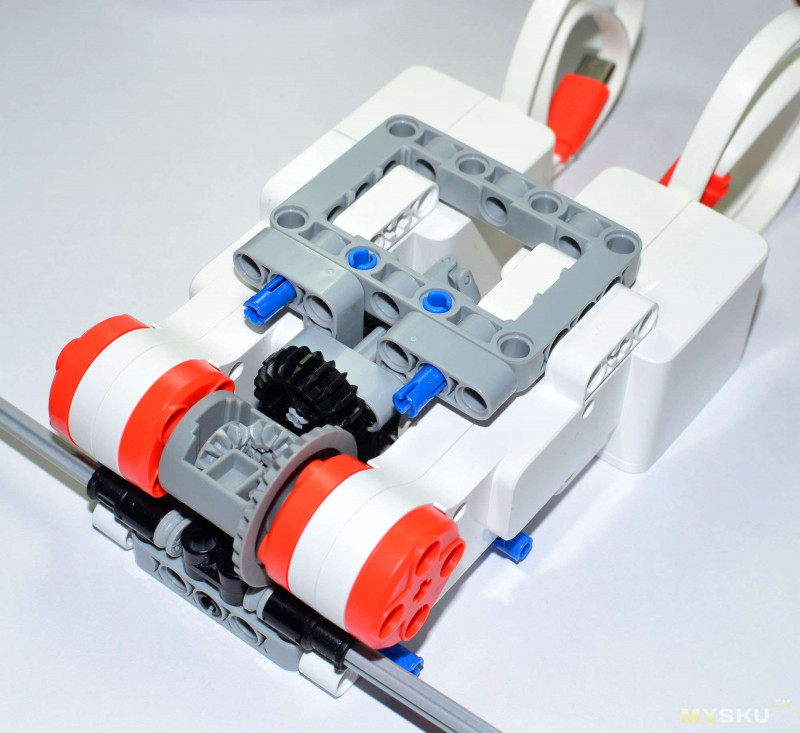
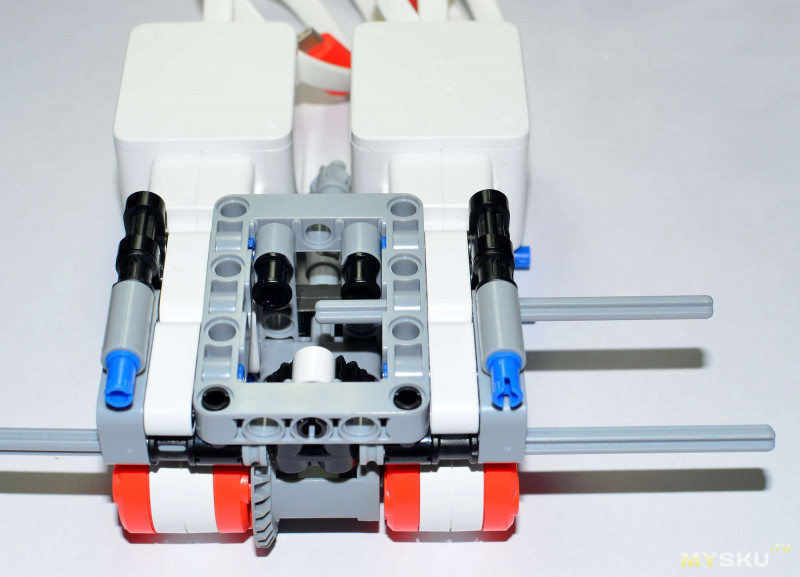
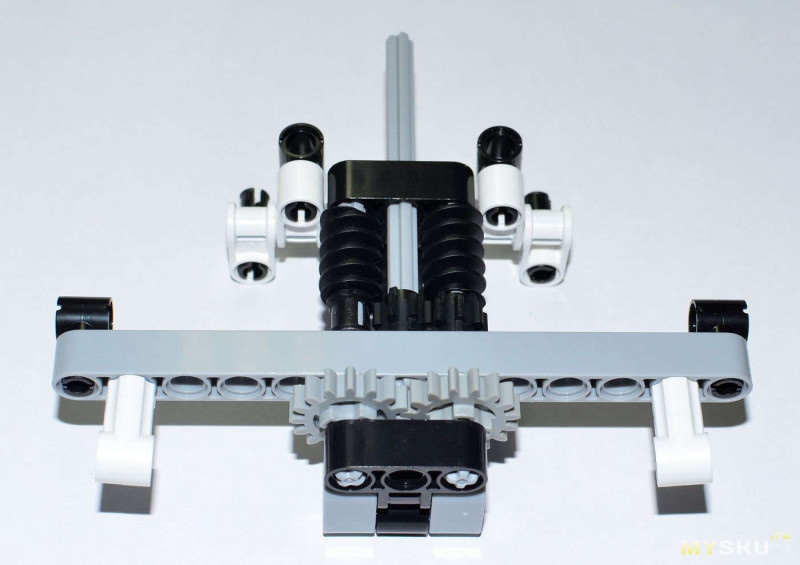
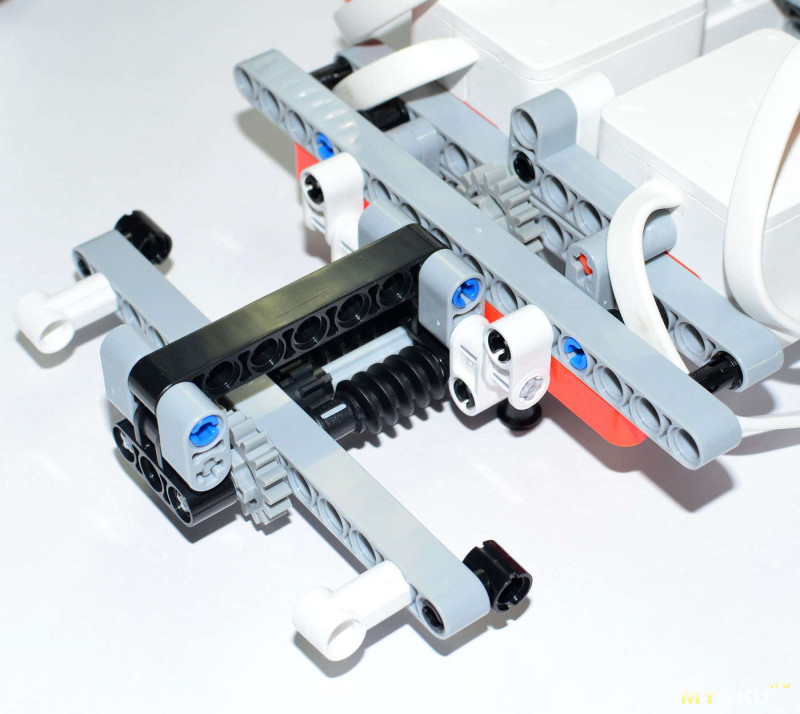
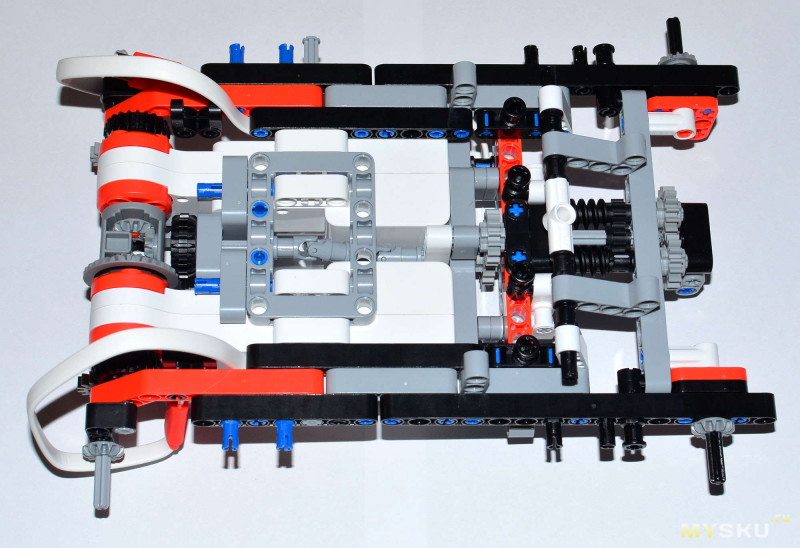
Шестерёнка там, шестерёнка здесь. Собираем другой узел трансмиссии, который затем помещаем в основную сборку. Шлейфы обоих двигателей надо будет пропустить в проёмы, как показано на фото чуть ниже
Вид с обратной стороны
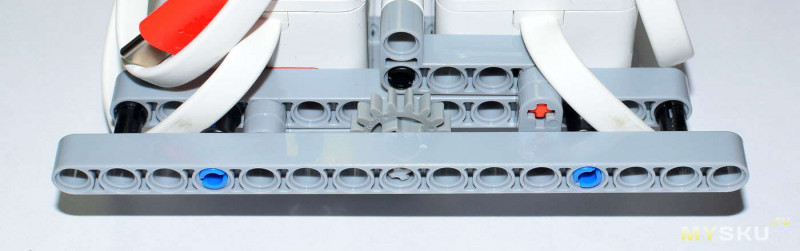
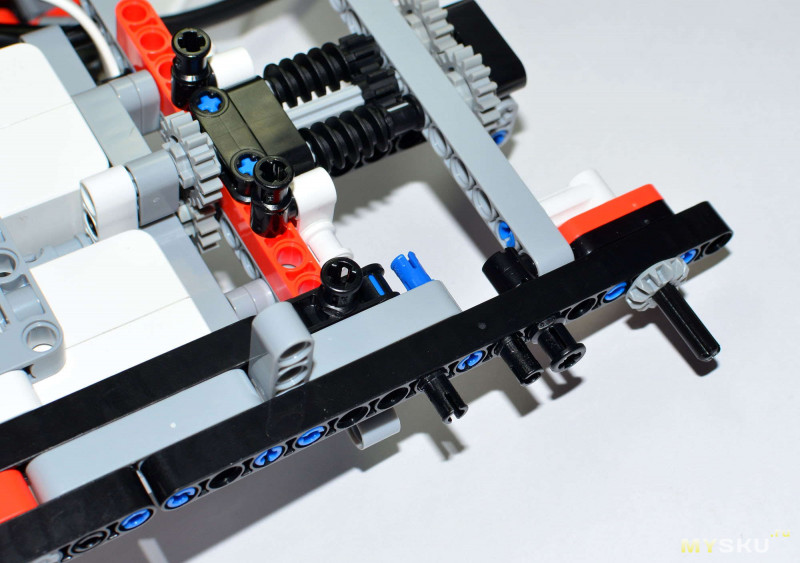
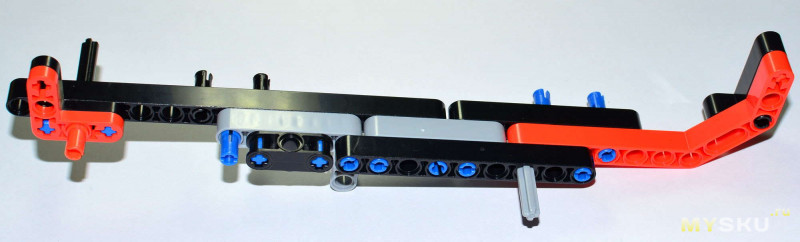
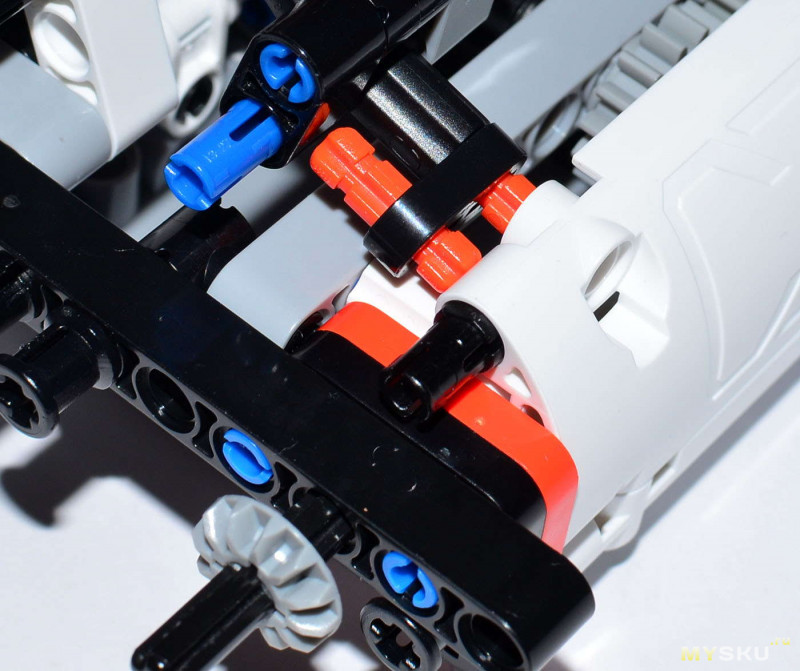
Наращиваем конструкцию, усиливаем ее
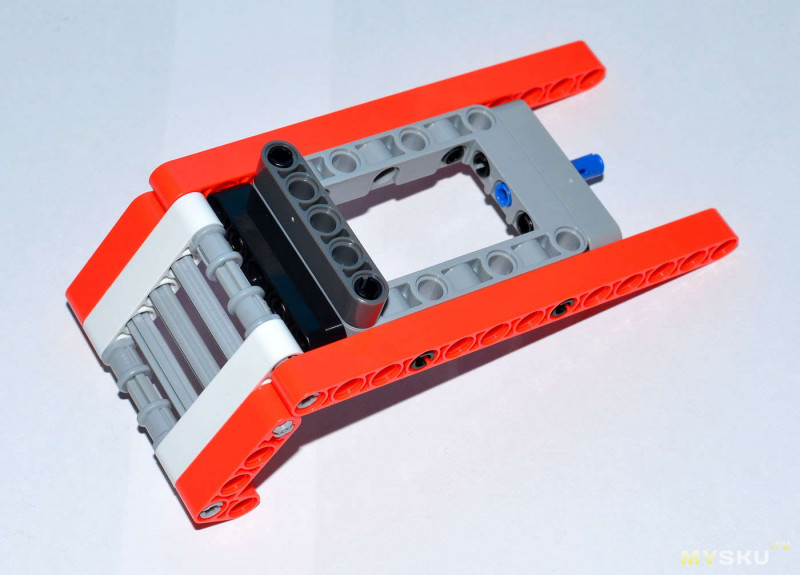
Тем временем потихоньку отделываем шасси бронёй
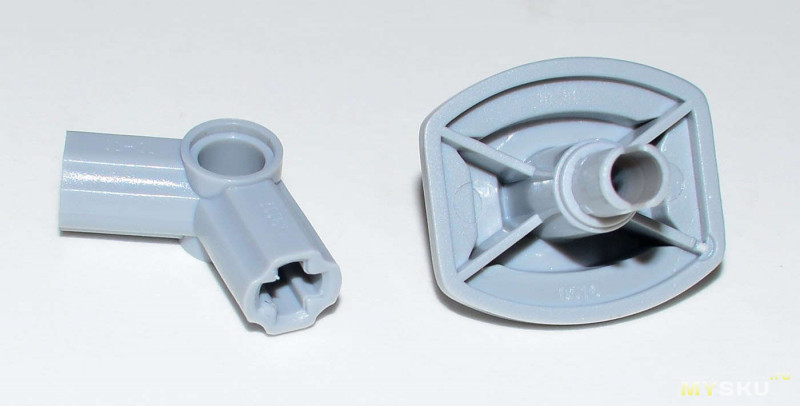
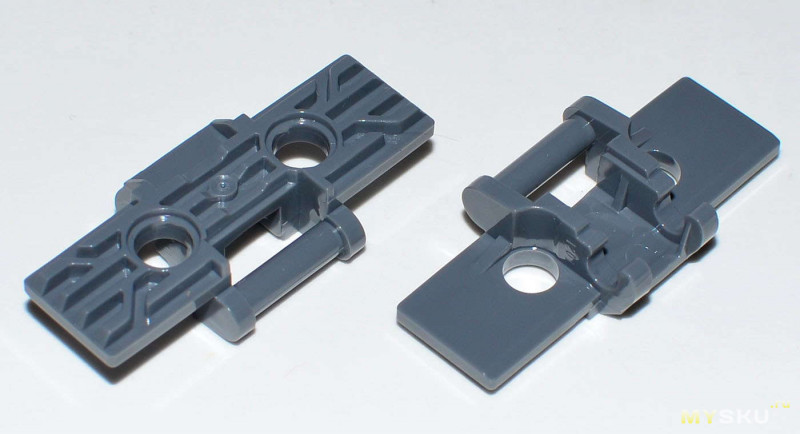
При наложении брони под большим углом на передней стороне будут использоваться крепёжные узлы такого вида
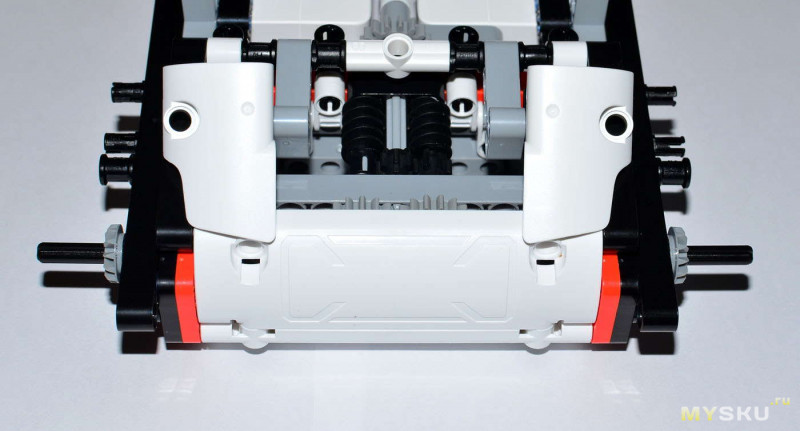
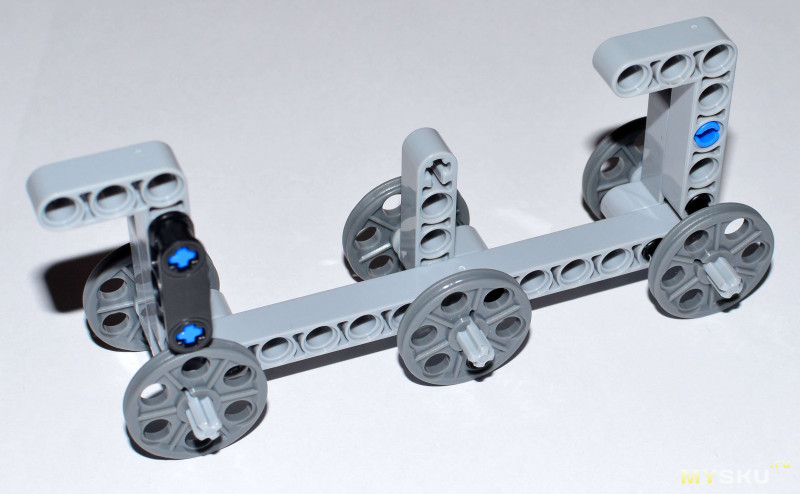
Пока перебираемся к сборке колёсной базы
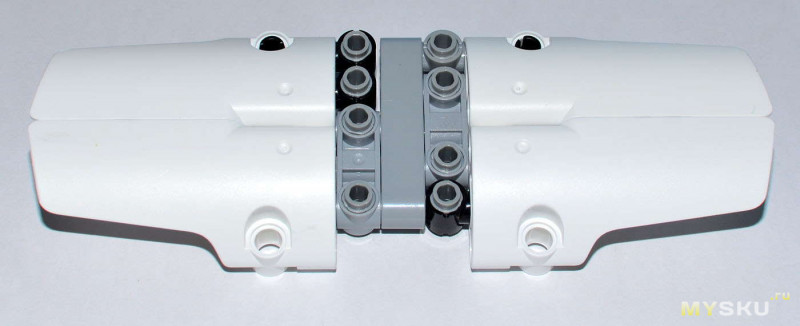
На шасси подготавливаем посадочную платформу для туловища робота
В левой части — крышка переднего нижнего капота
Облепляем и эту деталь бронелистами
Устанавливаем верхнюю часть с обвесом на верхнюю часть шасси
Отделка задней стороны
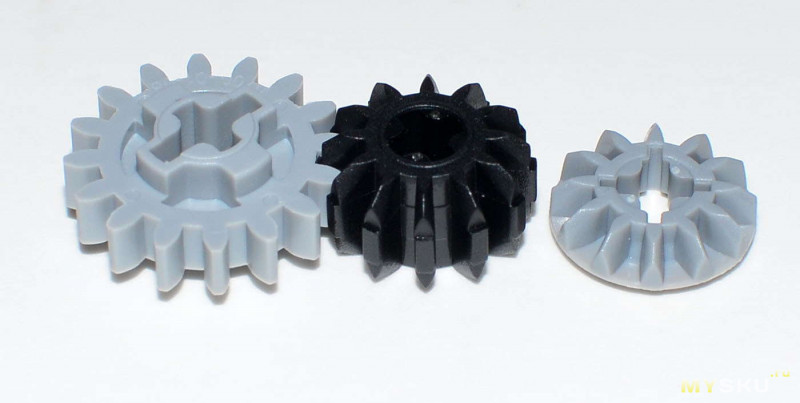
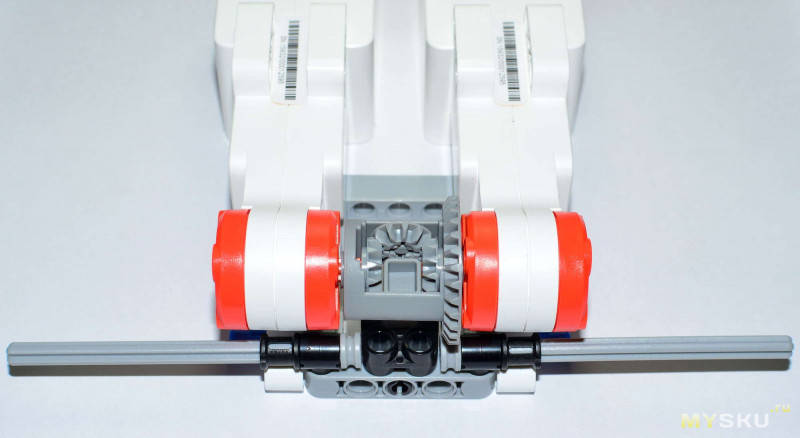
Устанавливаем чёрные большие шестерёнки с обоих сторон
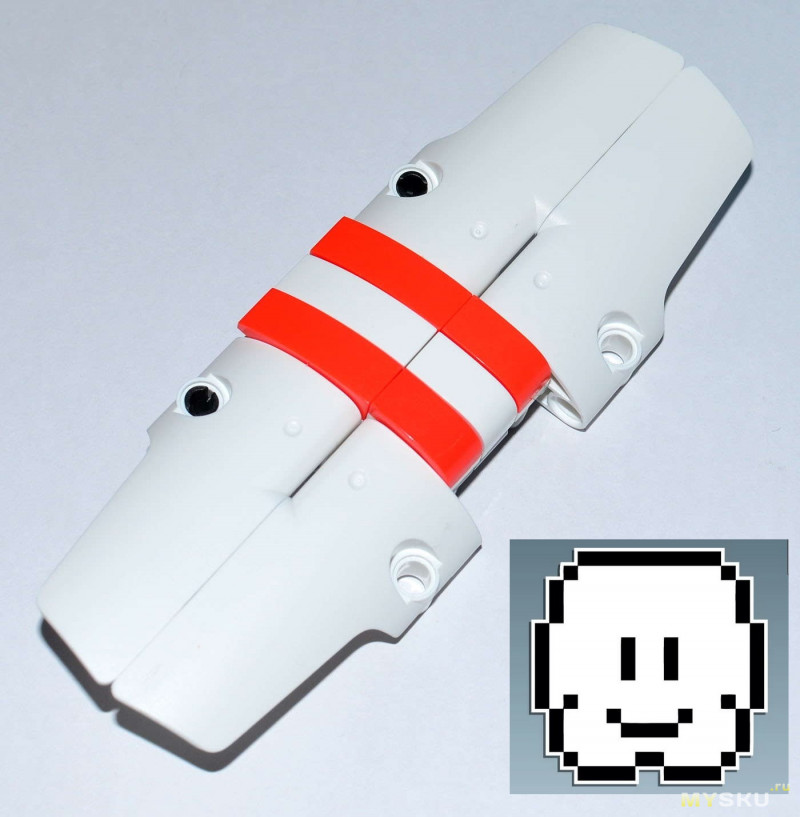
Немного декора
Защита бронёй боковых сторон
Почему-то облачко-пакостницо вспомнилось из «Марио»
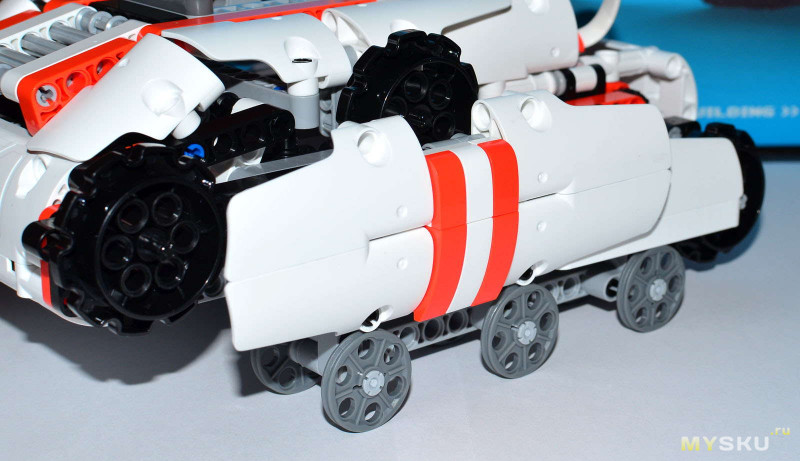
Цепляем обвес
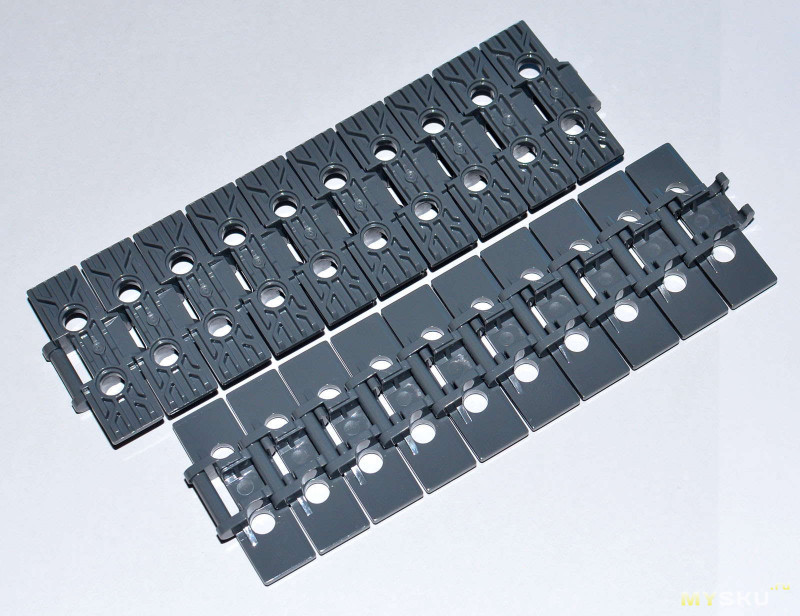
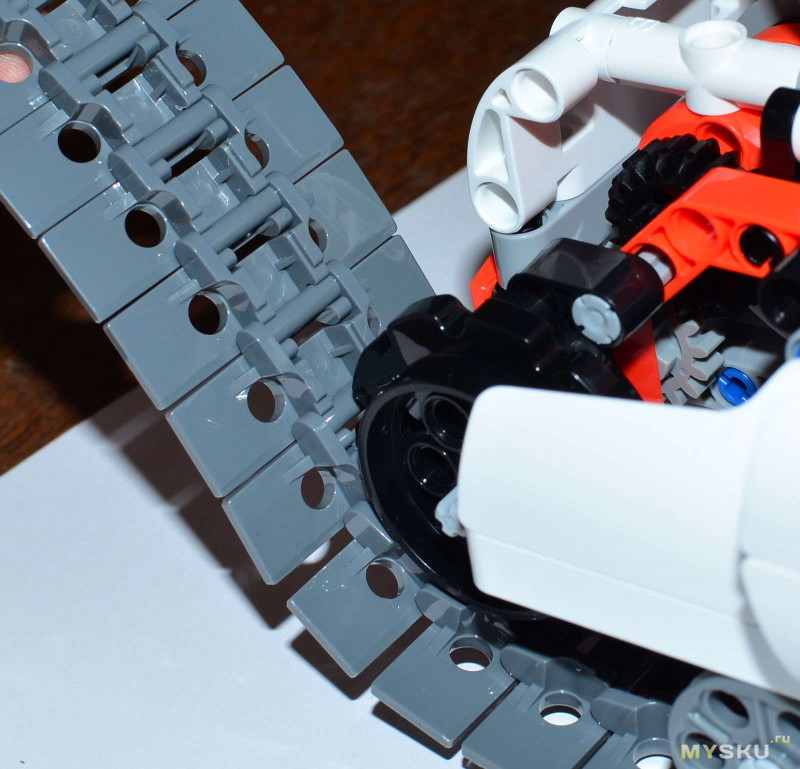
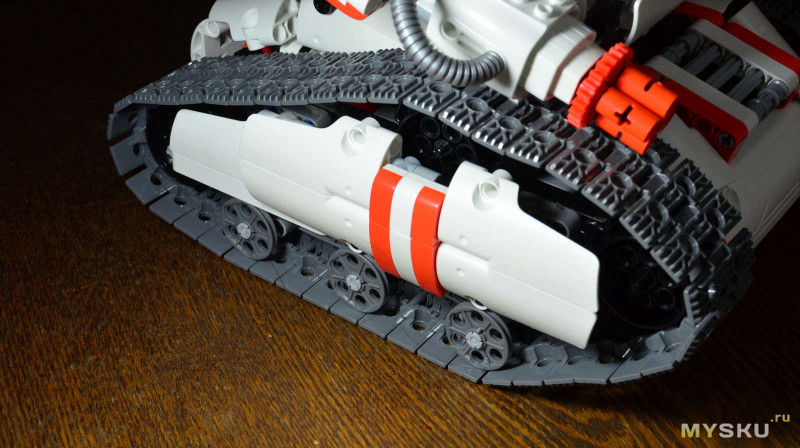
Собираем гусеничную ленту, последовательно сцепляя все звенья по 42шт., замкнув ленту уже на колёсах
Задний капот делаем, используя остатки звеньев гусеницы
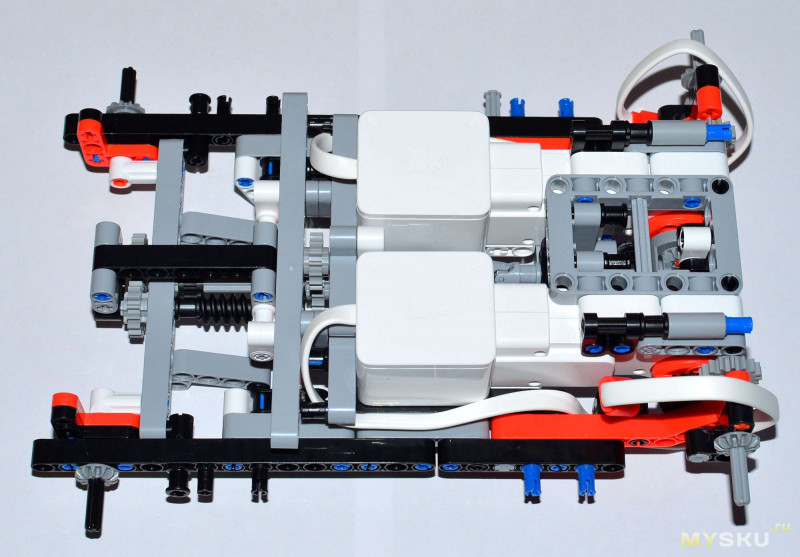
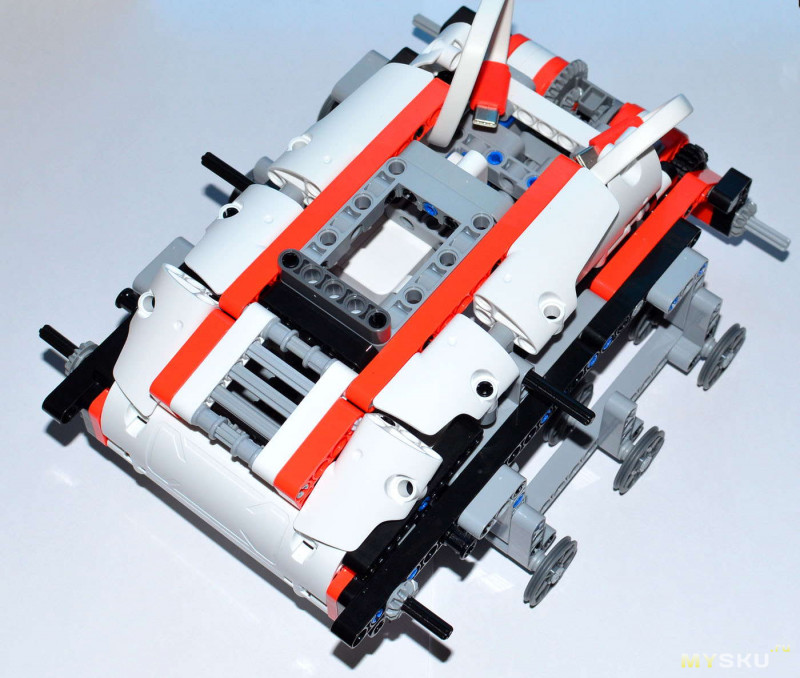
Теперь приступаем к строительству туловища робота
Что будет помещаться во внутрь, догадаться нетрудно — основной модуль
Туловище готово, но не совсем
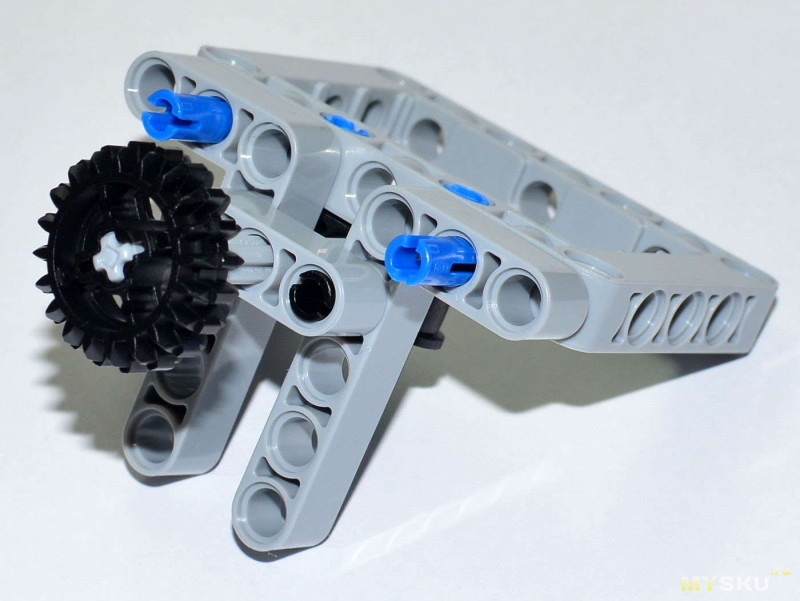
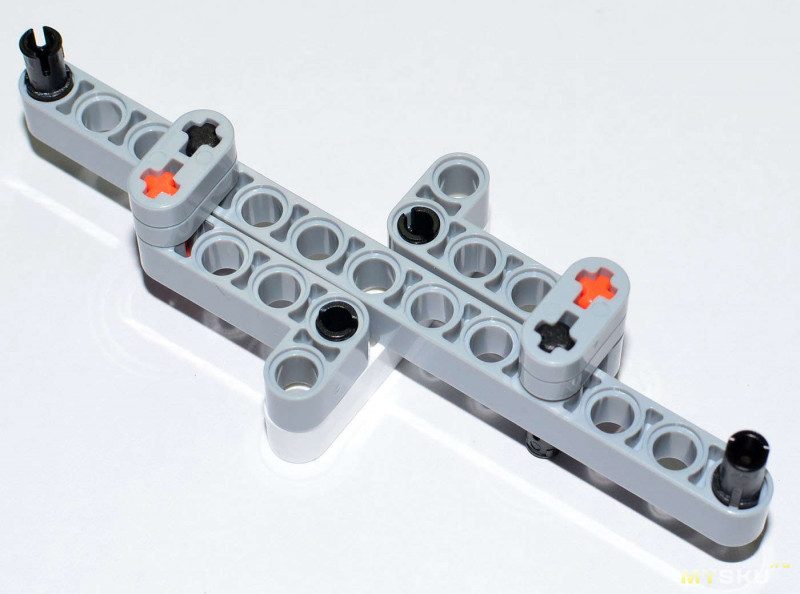
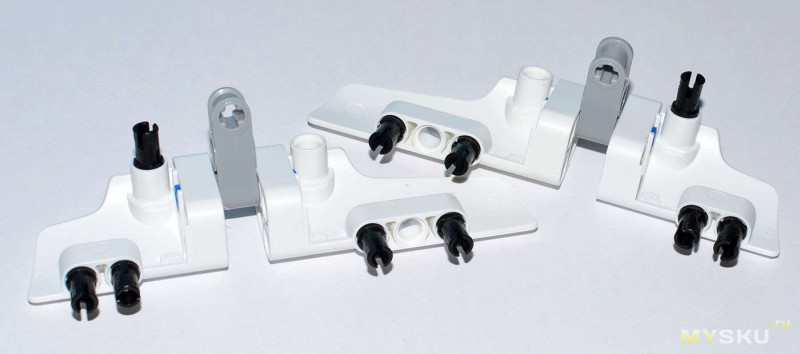
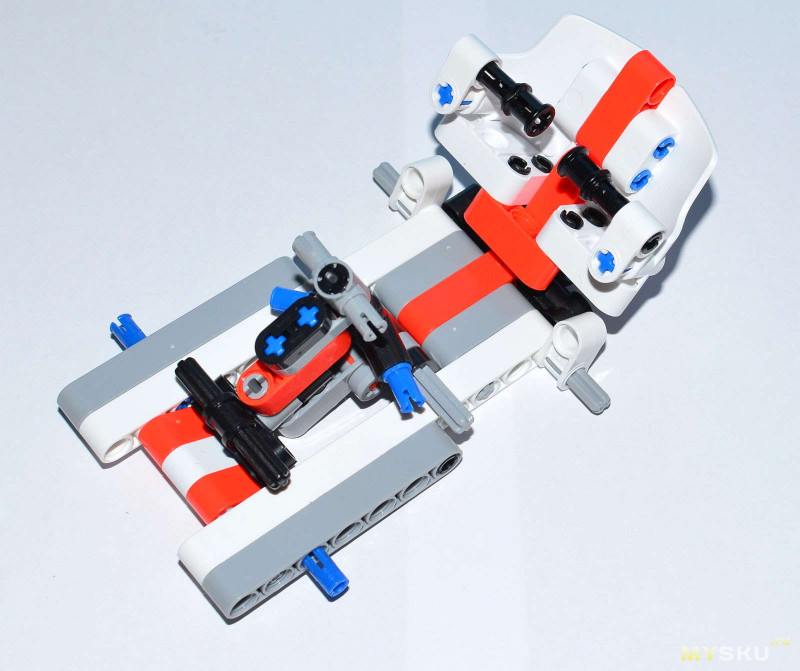
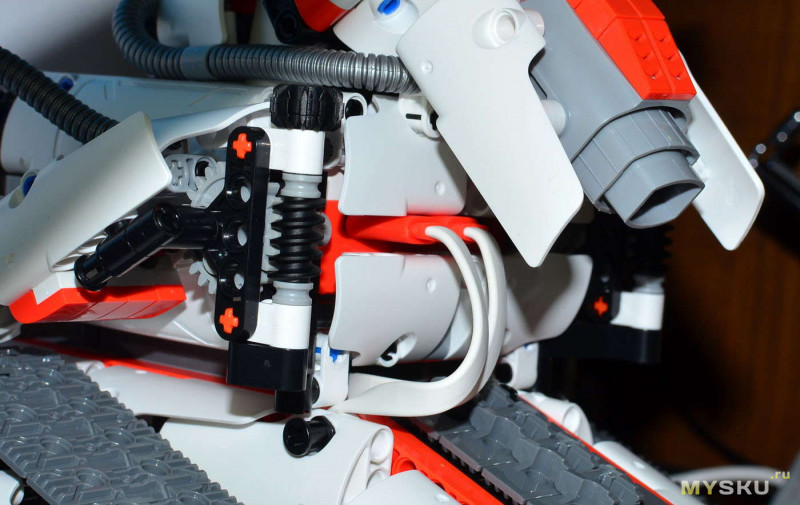
Построение руки-пулемёта мы также будем начинать со сборки шестерёночных узлов, однако они будут независимы от ходовой части танка. Шестерёнка, что чёрная, слева внизу — будет служить для ручной регулировки высоты поднятия рук-пулемётов.
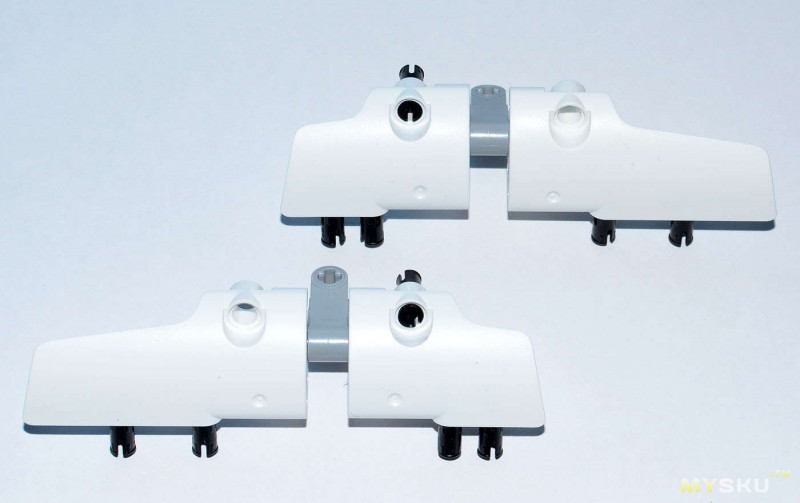
Также «обшиваем» постепенно белыми бронелистами
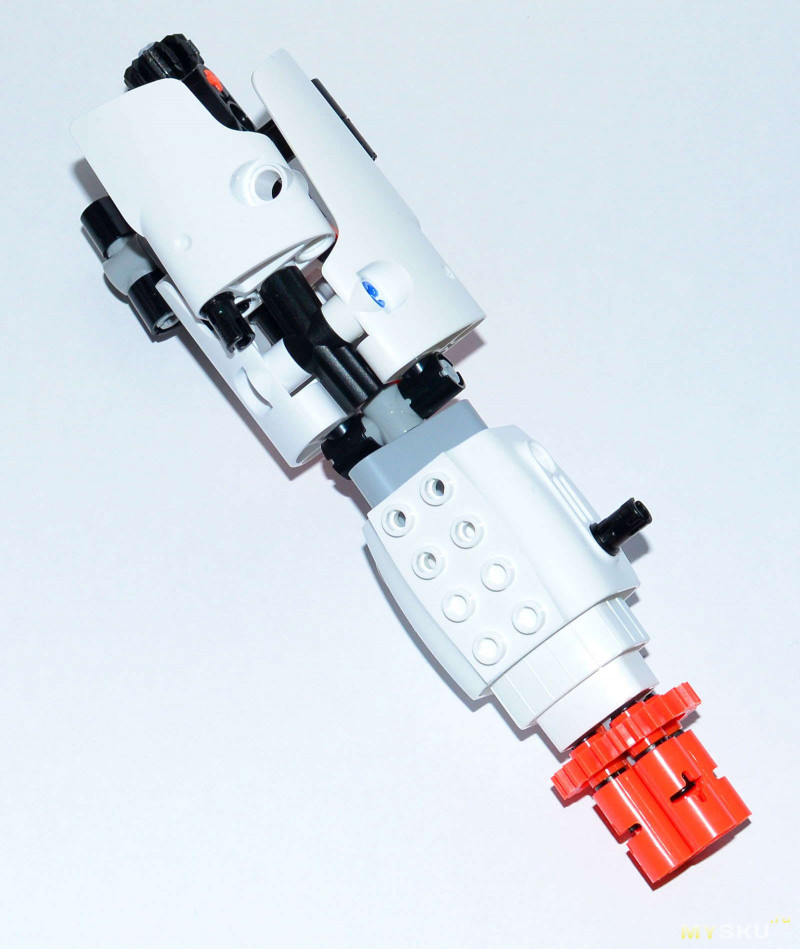
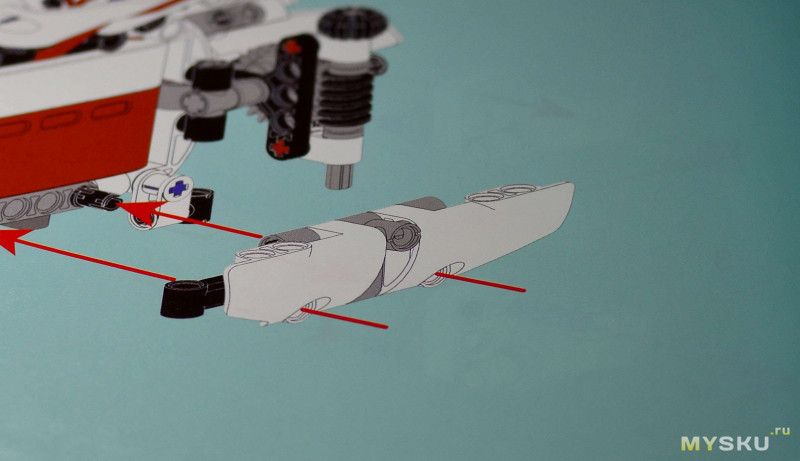
Сборка пулемётной части
Готовая рука
Состряпав вторую точно такую же, можно уже заняться вооружением робота
Загружаем уже модуль «жизнеобеспечения» :)
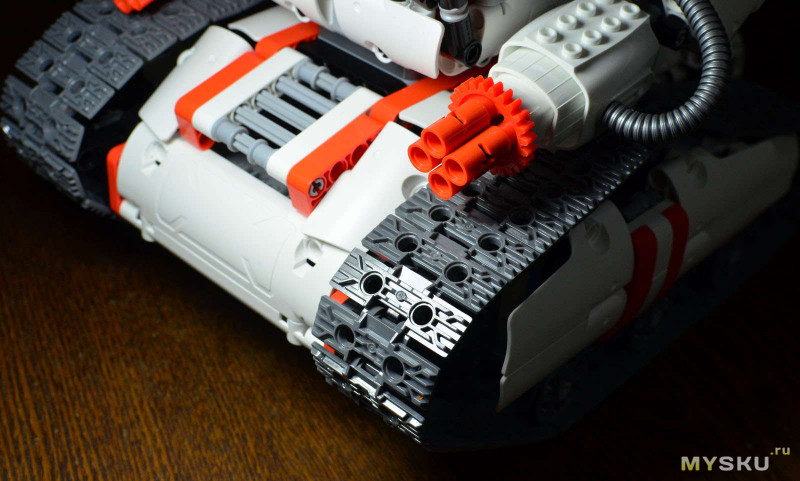
Без снаряги тоже никак, вешаем ему на спину ракетоподобный рюкзачок
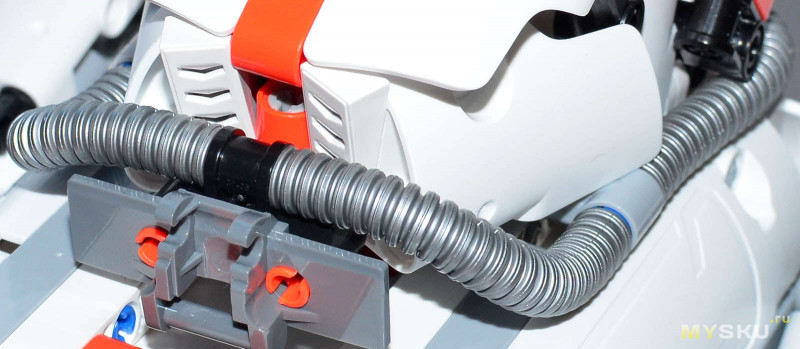
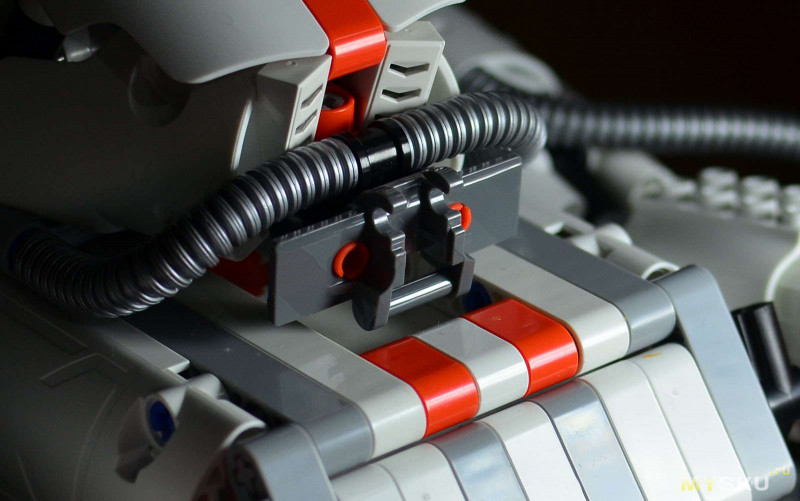
Про украшения тоже не забываем. Устанавливаем гофрированную трубку
Кажется, он чему-то удивлён. Ну конечно, ходить пока нельзя
Последний этап сборки — воссоединение двух половин. Подключаем кабели сервоприводов в основной блок.
Что осталось в коробке
Нюансы и забавные ошибки, с которыми столкнулся я
Строительство этого робота происходило два вечера и этот процесс меня затянул настолько, что мне приходилось откладывать просмотр сновидений. Спать ложился уже под утро, когда на ногах стоять больше не было сил. Поэтому львиную долю времени в процессе сборки я был довольно сонный. Я не исключаю, что кого-то другого может также затянуть этот процесс до такого состояния, поэтому создал этот раздел, дабы показать какие ошибки я допускал и не только мои ошибки, но и технические нюансы, о которых не лишним будет знать.
Момент 1
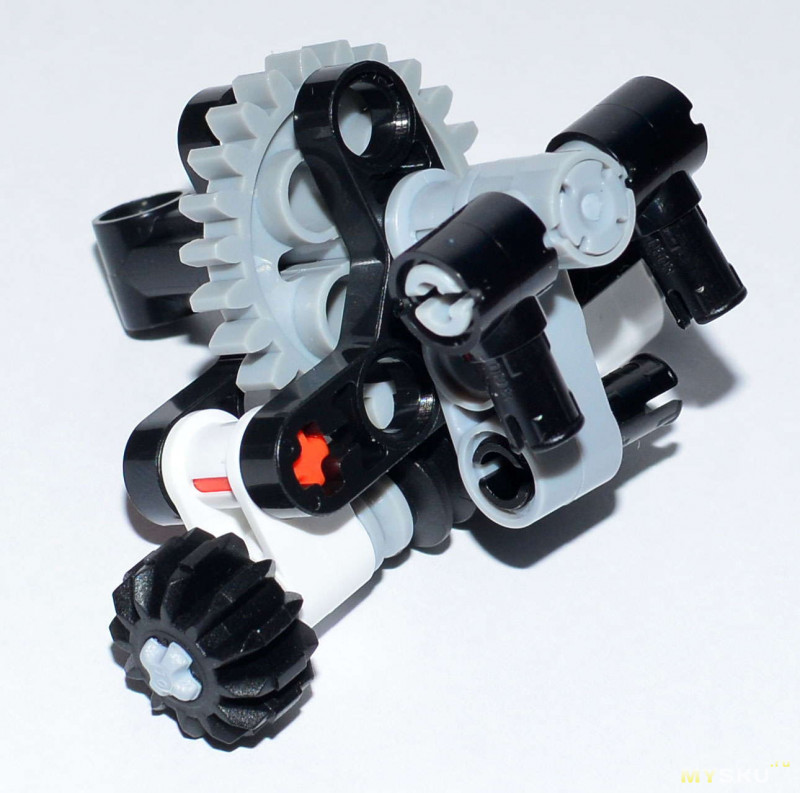
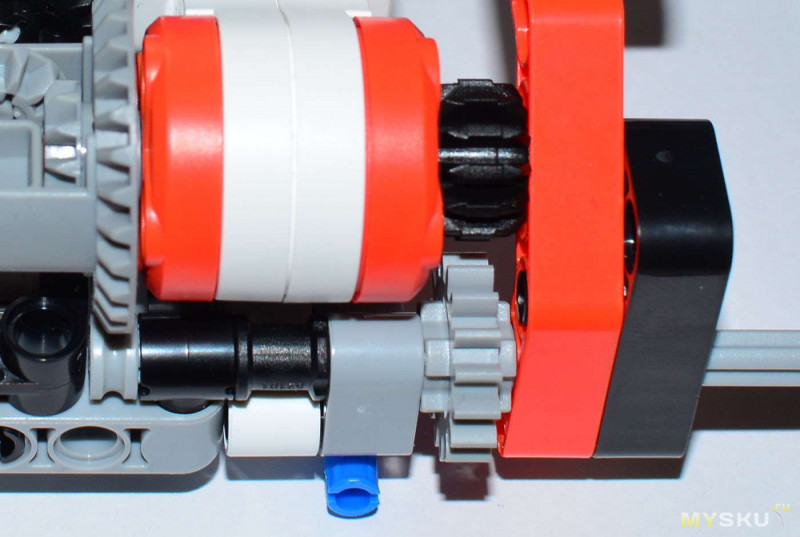
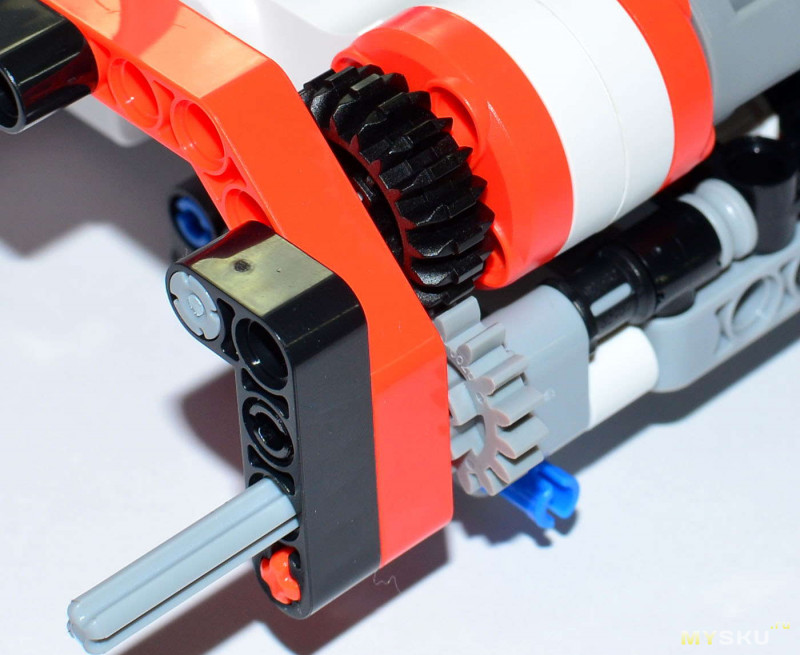
Присмотритесь на это фото — ничего странного не заметили?
— чёрная шестерёнка была установлена не та, что нужно. Она даже не цепляет соседнюю серую шестерёнку. Правильный вариант с правильной шестерёнкой в этом месте выглядит так
Момент 2
Один раз спутал светло-светлую балку с тёмно-серой, в итоге полосы на боковых сторонах немного отличаются оттенком серого
Момент 3
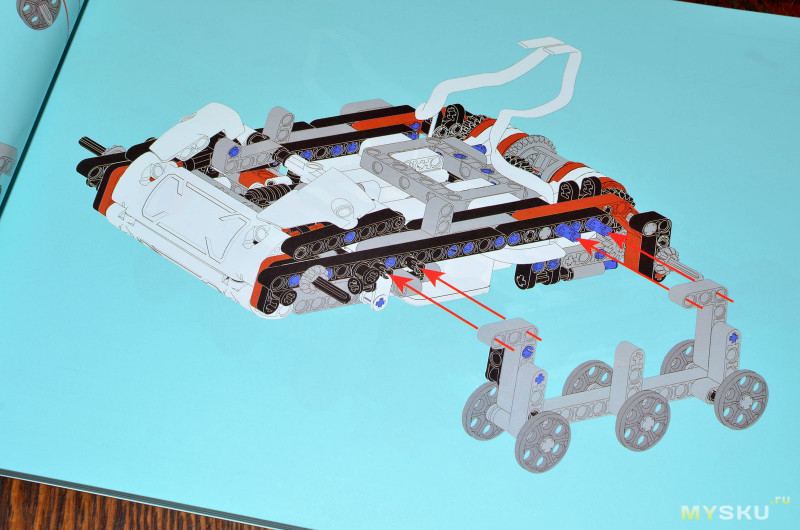
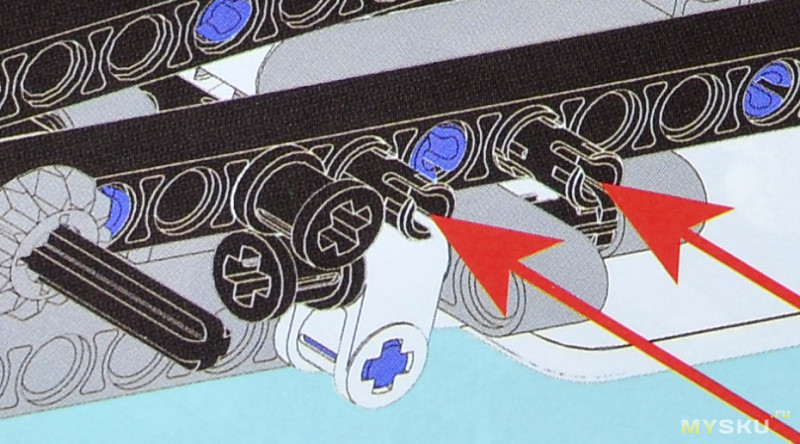
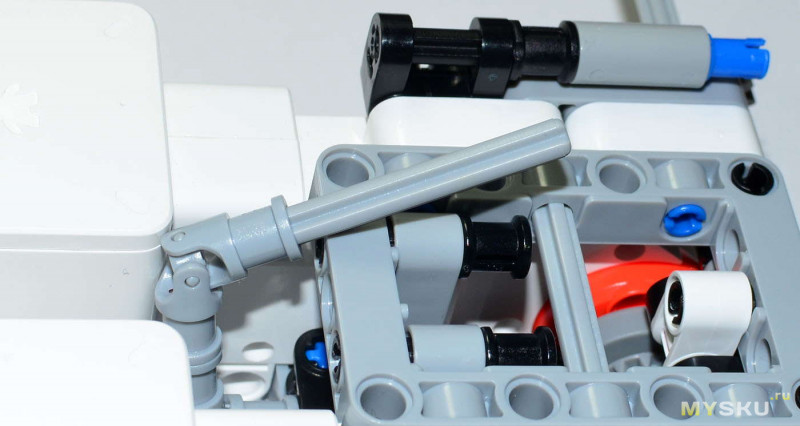
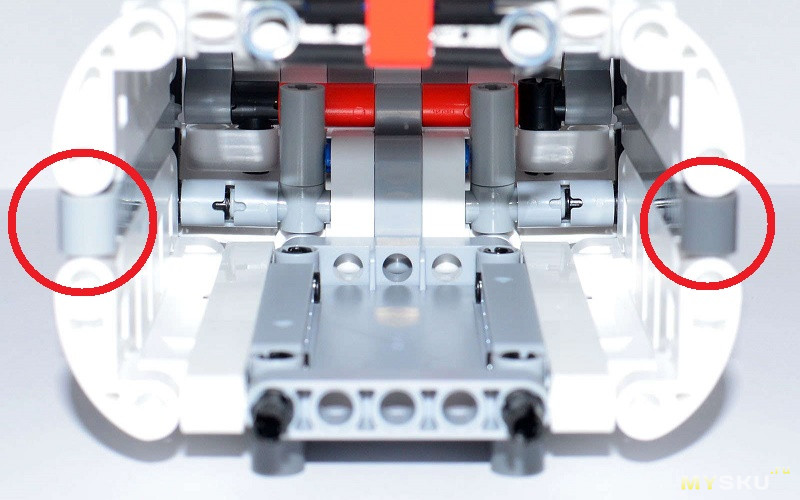
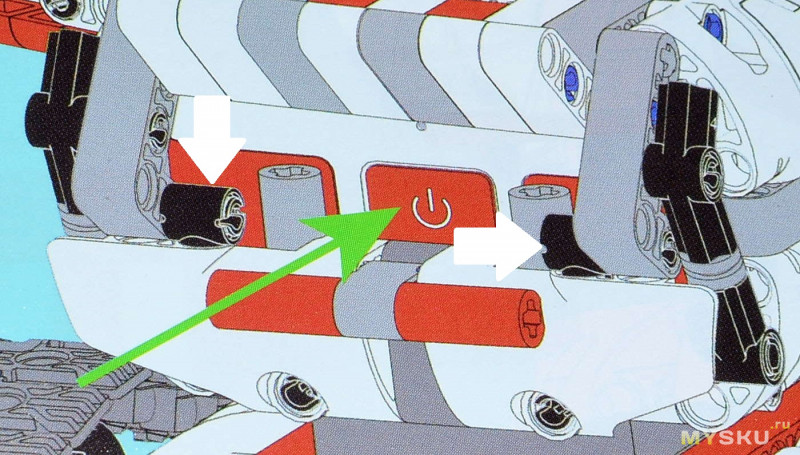
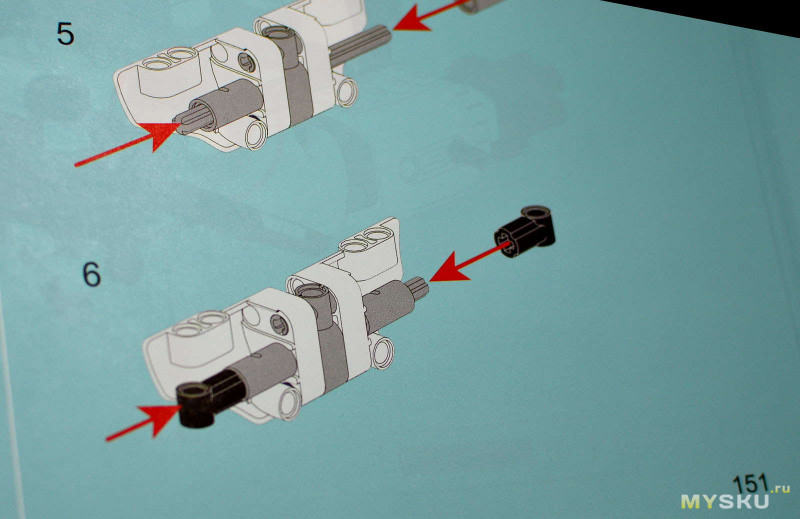
Чёрные втулки. Для начала посмотрим, как они расположены в руководстве по сборке — обе горизонтально. (отметил белыми стрелками)
А я как-то умудрился сделать так…
Момент 4
Детали хоть и выполнены качественно по обработке краёв и жёсткости сцепления, но зачастую на них можно заметить точечный облой. Нюанс здесь в том, что иногда бывает непонятно при сборке, какой стороной наружу деталь окажется в итоге. Поэтому с внешней стороны на деталях робота иногда можно разглядеть такие точки.
Момент 5
По мне забавный такой нюанс, который касается инструкции. Возможно даже о нём не стоило бы упоминать, т.к. ошибок он не провоцирует. Но ради интереса покажу. На 151-й странице руководства втулка, что посередине, смотрит отверстием вверх. И если она была так установлена, то провернуть её уже никак нельзя. Только целиком всё разбирать придётся.
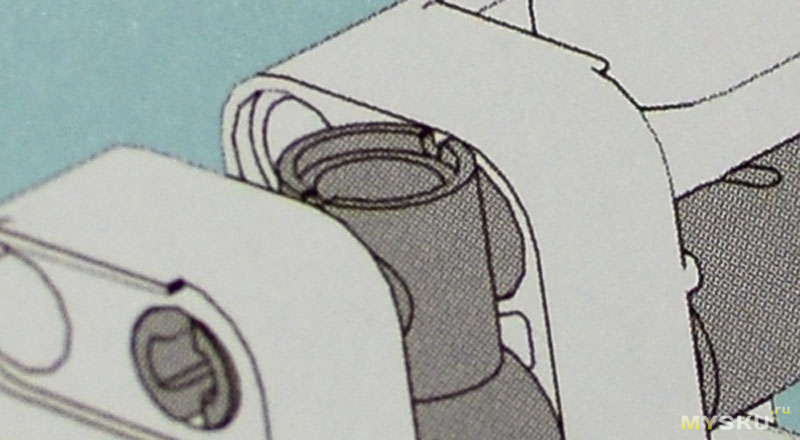
И буквально на следующей странице, втулка уже оказывается повёрнутой отверстием вбок.
Но как я выяснил потом после сборки, это ни на что не влияет, поэтому если вы вдруг столкнётесь с этим моментом, то можно не обращать на это внимание.
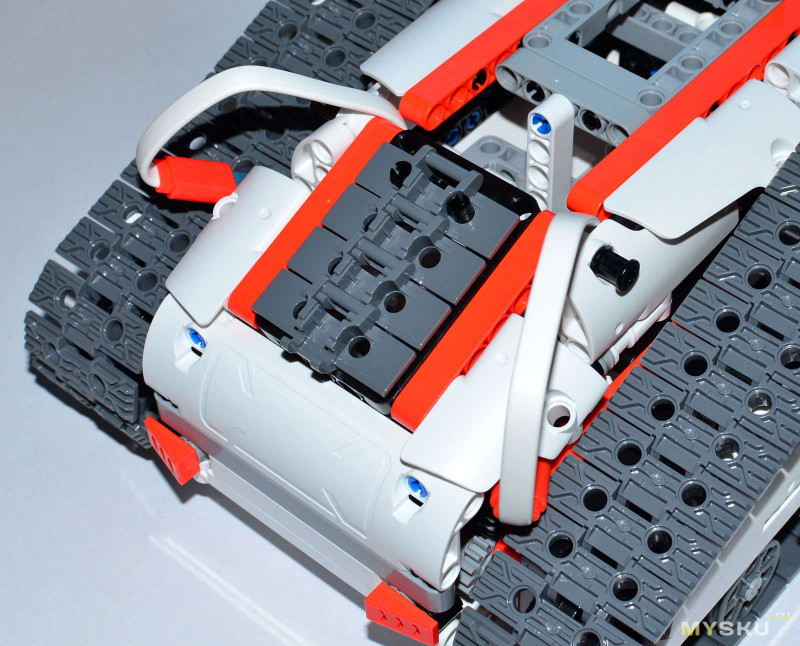
Обзор робота
Внешний вид
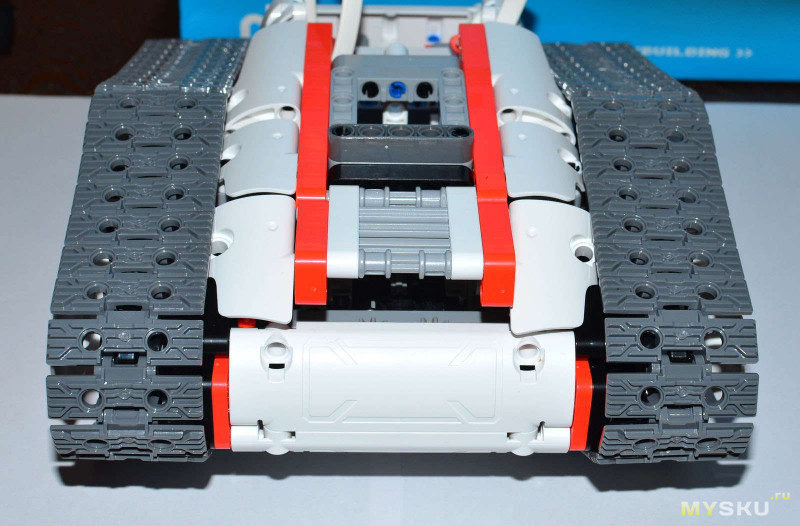
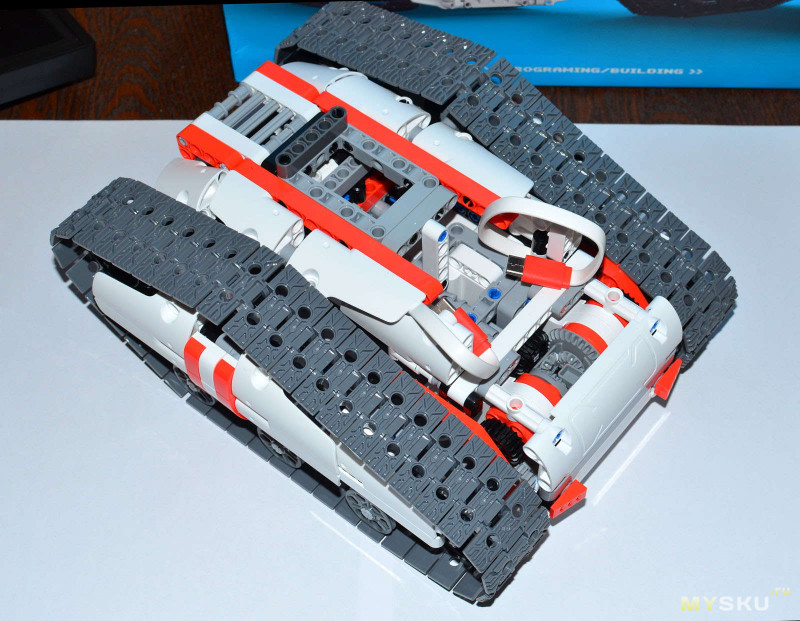
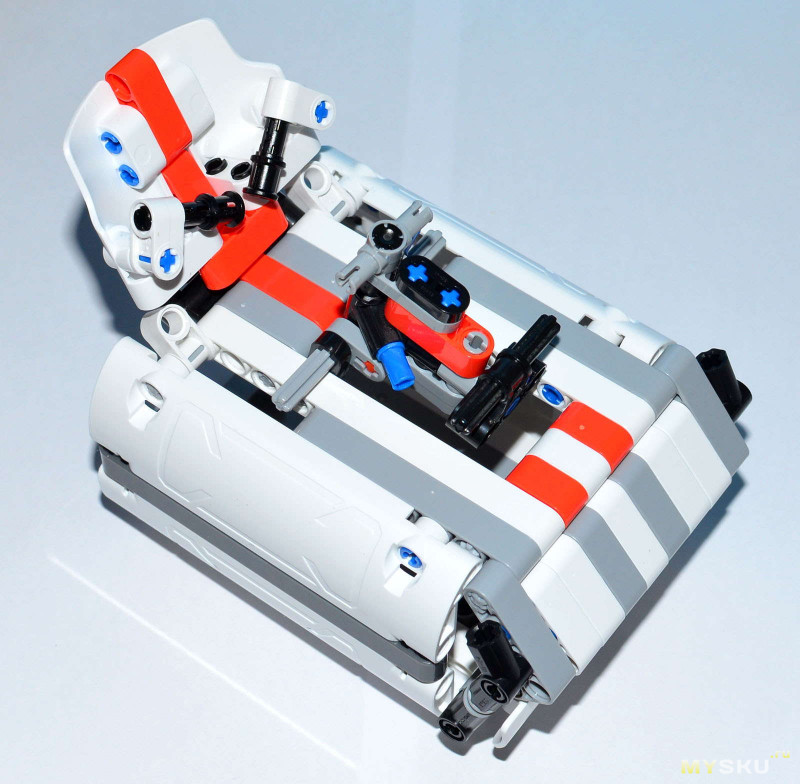
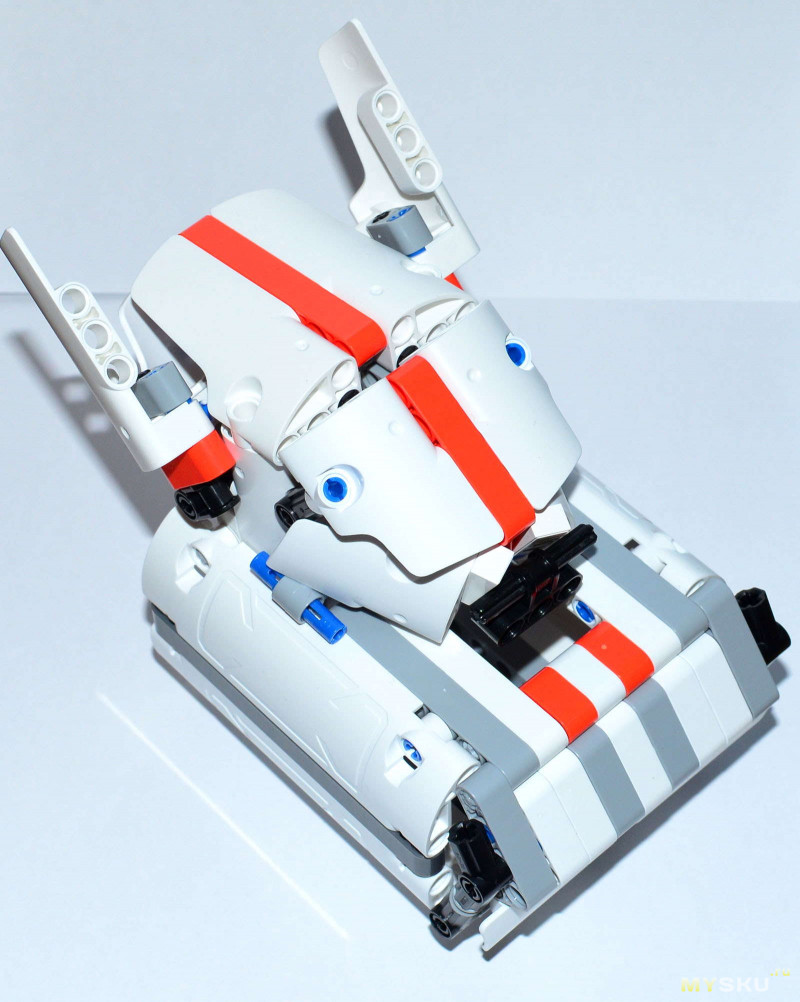
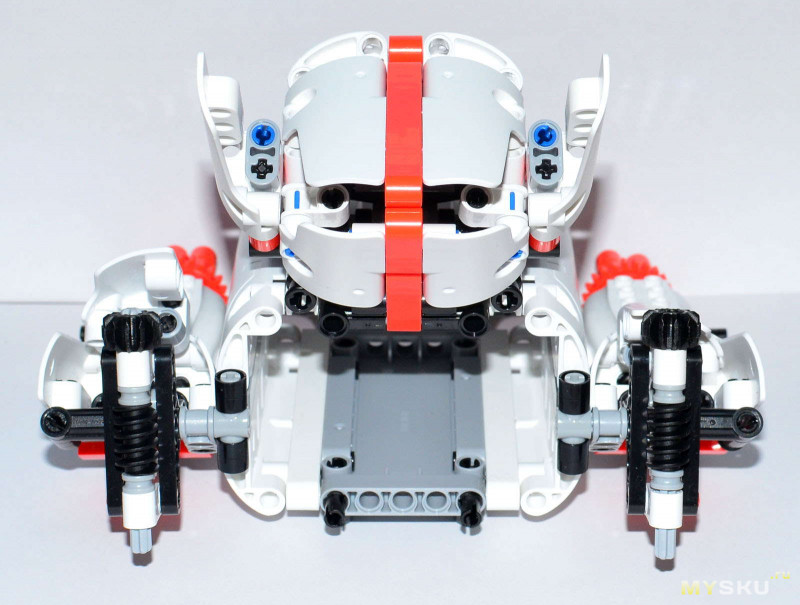
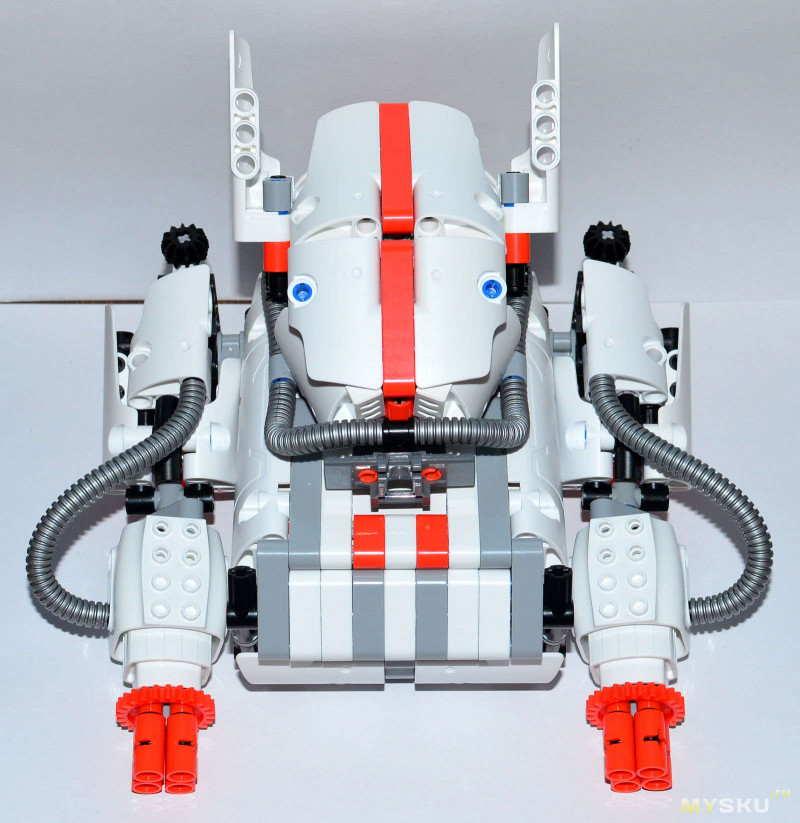
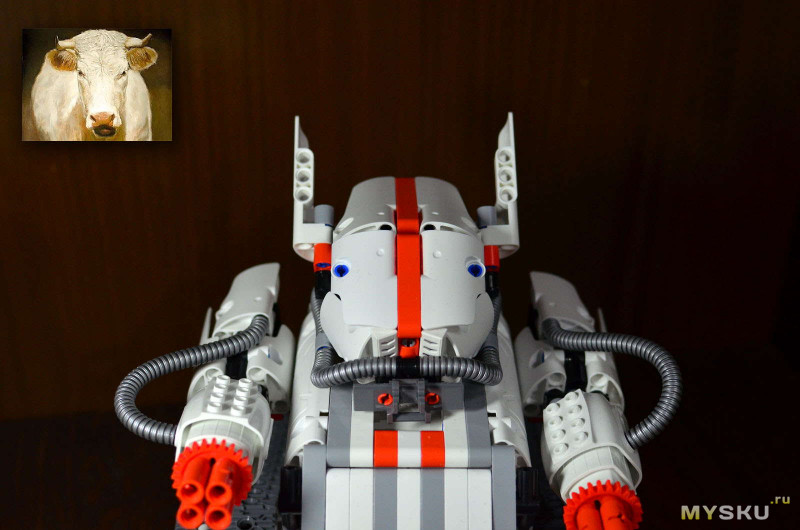
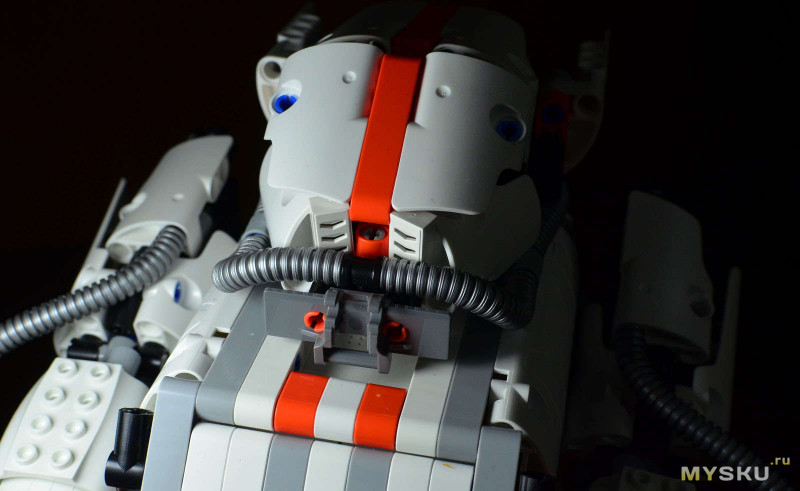
Вид робота уже в собранном состоянии. Что мне нравится в дизайне, — это футуристичность и минимализм, т.е. отсутствие насыщенных кричащих цветов, которыми изобилуют дешёвые игрушки. Основной цвет нейтральный — белый с умеренными вставками элементов из оранжевого и серого цвета, что неплохо сочетается. Интересно выполнена лицевая часть робота. Вроде лицо состоит из стандартных деталей, однако как ни странно, при взгляде под определённым ракурсом, может меняться восприятие. Например если посмотреть на робота свысока, то он кажется довольно забавным, и становится похожим на бычка, но не на кролика, как нам пытались намекнуть разработчики
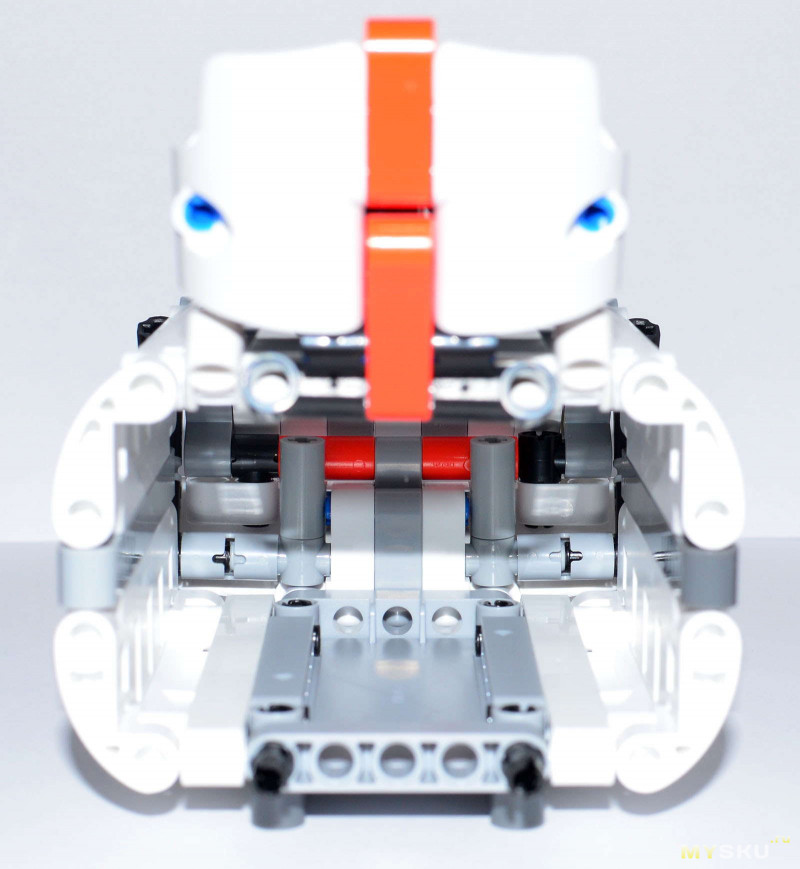
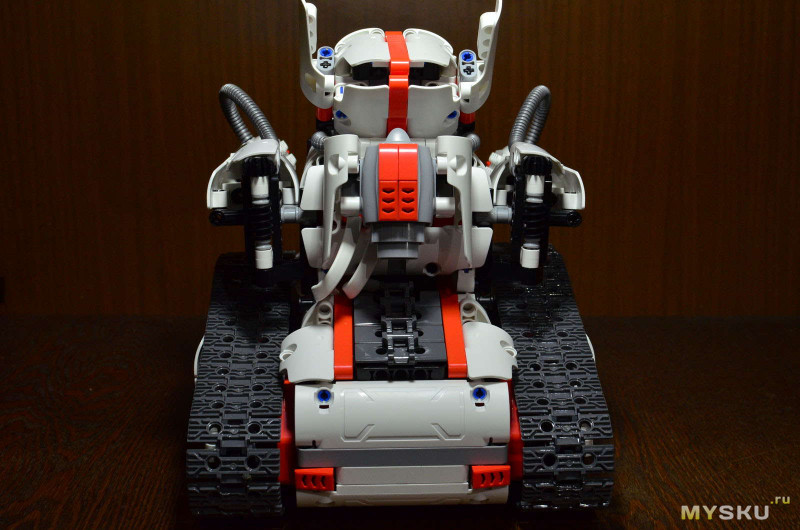
При взгляде спереди и на одном уровне с роботом, — он приобретает более суровый и брутальный вид
Самостоятельно разводить руками-пулемётами робот не могёт. Ему нужно в этом помогать
С помощью колёсика регулируется высота поднятия рук
Уши тоже не статичны, а вполне регулируемы
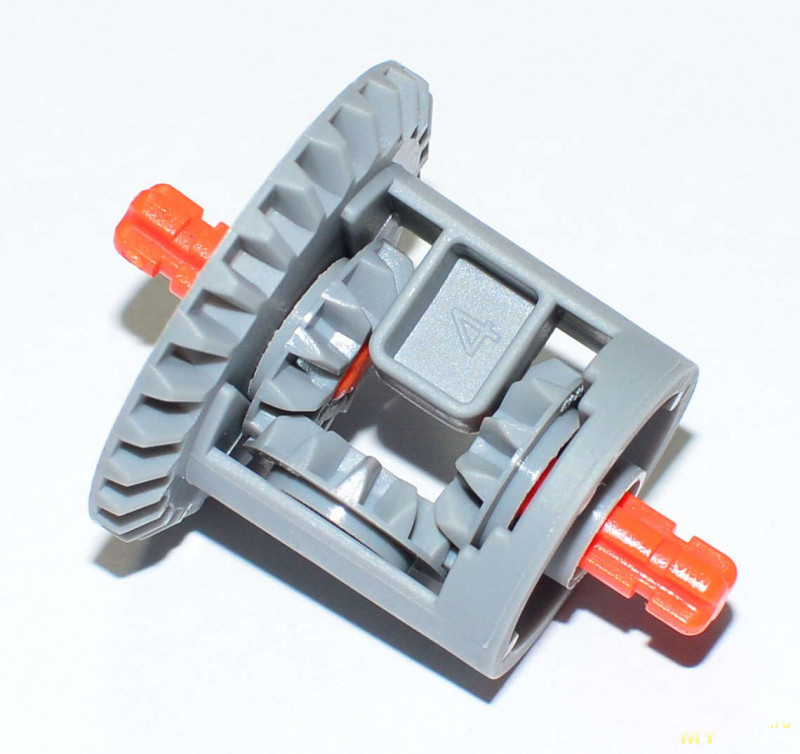
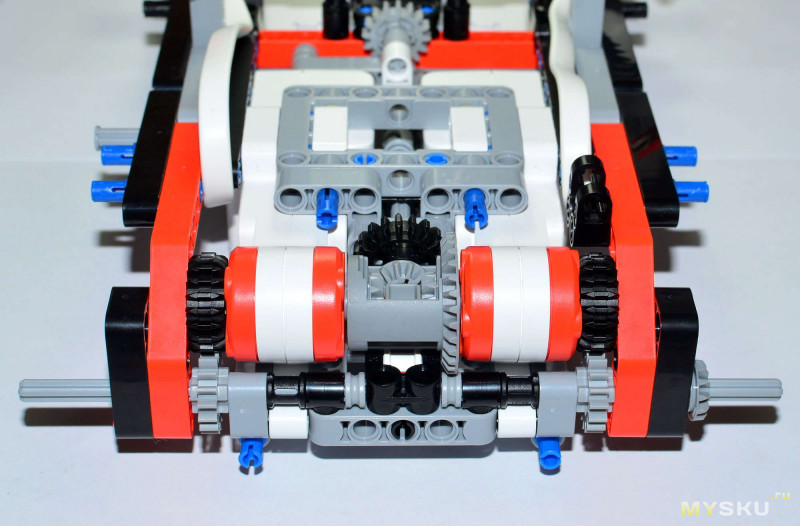
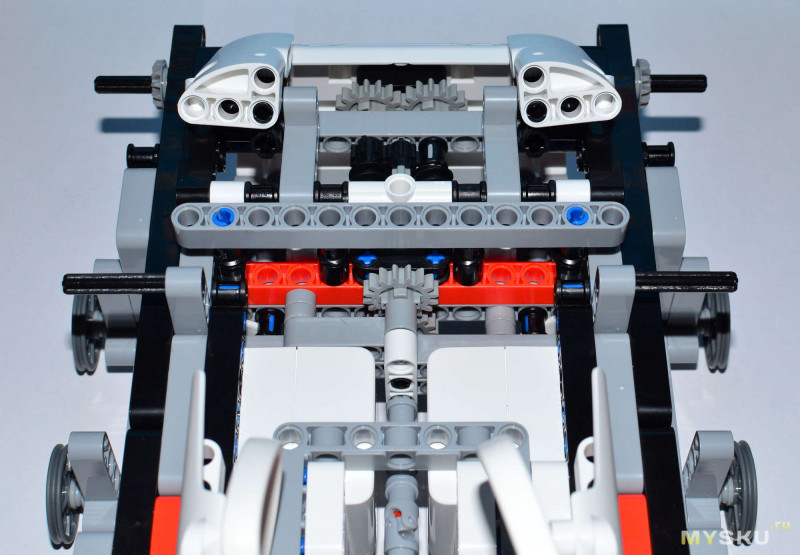
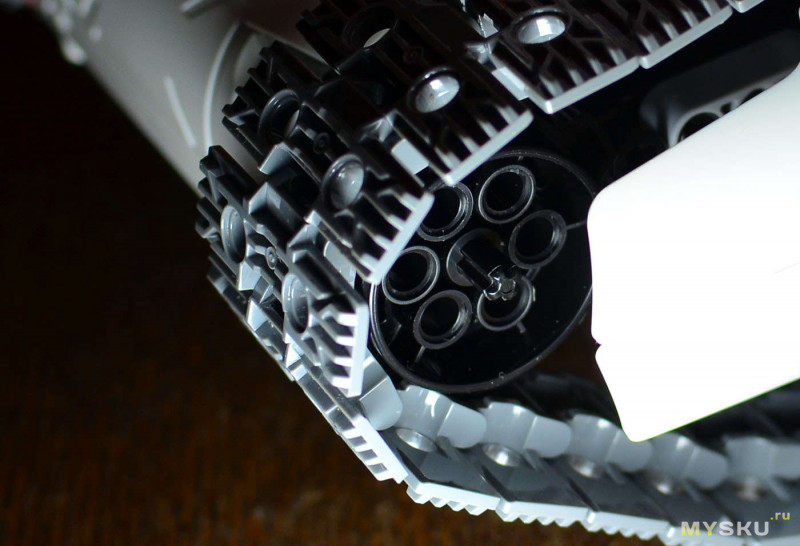
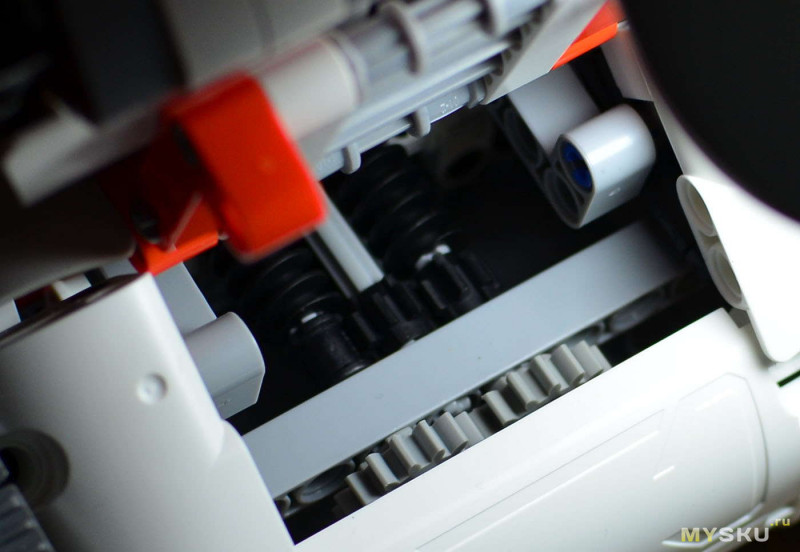
Задний капот можно открыть, подняв крышку или закатав гусеницу. Под ним скрывается узел трансмиссии и при желании можно наглядно посмотреть, каким образом достигается одновременное и в тоже время раздельное вращение гусениц
Спереди — уже два капота. Под нижним также можно посмотреть на работу шестерёнок
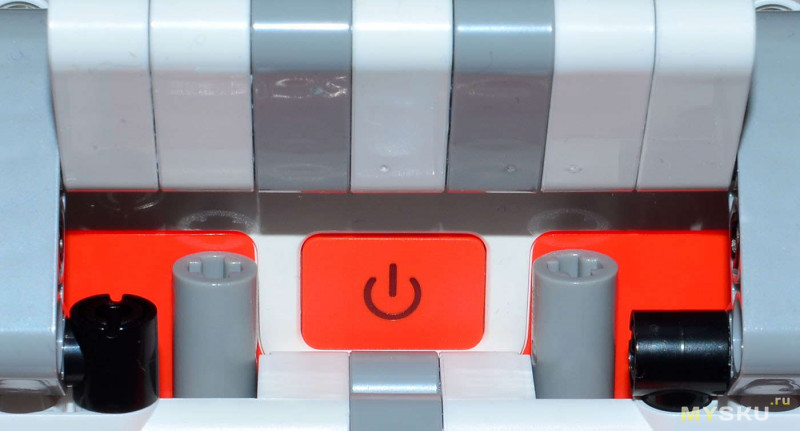
За верхним капотом скрывается кнопка включения робота
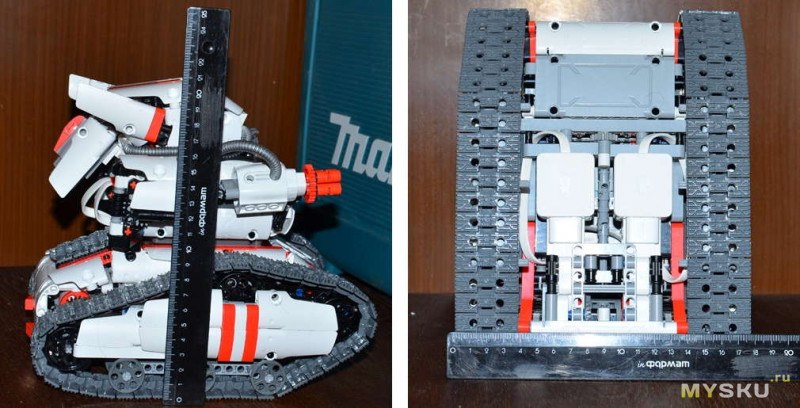
Размеры и вес робота
Высота 21см
Ширина ~18см
Вес 1229гр
Дополнительная информация
Управление со смартфона
Чтобы управлять роботом со смартфона, нужно скачать специальное приложение, отсканировав QR-код с брошюры, что идёт в комплекте. Отобразится такая ссылка для перехода:
Минимальная версия Android, которая поддерживается этим приложением 4.4.4, на моём старом «Red Rice» с Android версии 4.2.2 приложение не захотело скачиваться, но таки раздобыв APK-файл с 4PDA, оно отказалось устанавливаться из-за синтаксической ошибки. Так что программу качал на другой телефон с более свежей версией ОС.
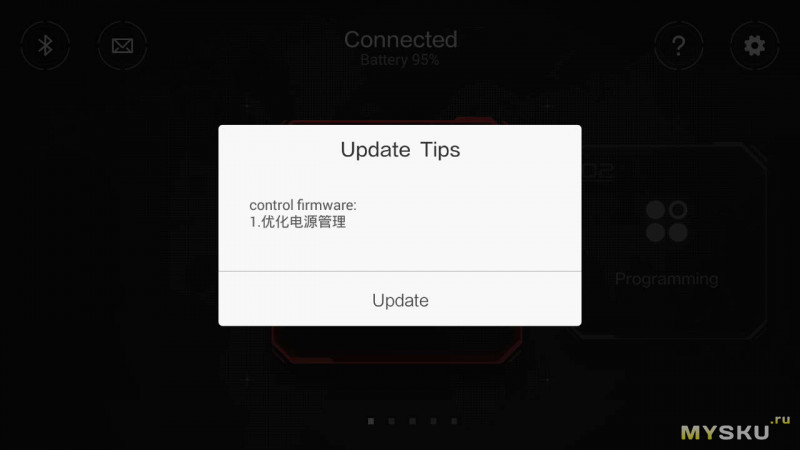
Робот MITU был предварительно включен, и, отыскав его по Bluetooth и синхронизировавшись с ним, появилось новое доступное обновление по воздуху
Версия 1.7.0
Я согласился на его установку и пошла закачка. LED-индикатор в роботе при этом мигал фиолетовым цветом
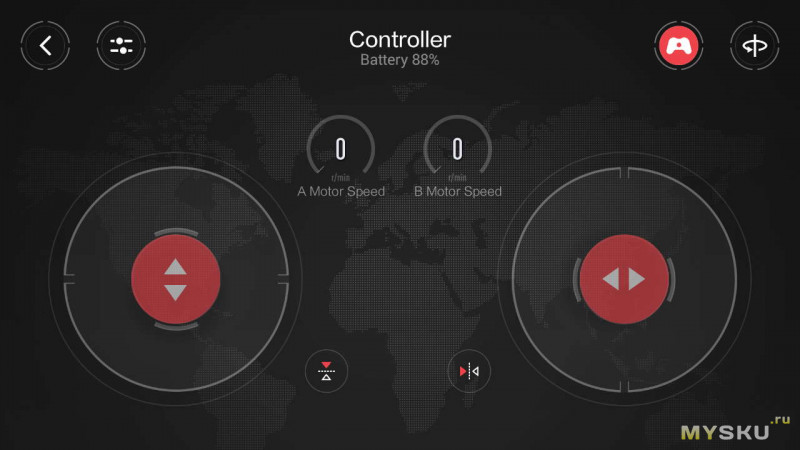
Весь процесс занял недолго. Минут 10. После обновления появились опции управления роботом. Самая типичная опция — управление им с помощью виртуального геймпада, нарисованного на экране. Переходим в него.
Левый стик имеет два положения — вверх и вниз. По нажатию вверх танк просто поедет вперёд, вниз — просто назад. Причём чем касание находится дальше от центра окружности, тем с большей скоростью будет ехать танк, т.е. имеется плавная регулировка скорости езды. Правый же стик имеет горизонтальные позиции — влево или вправо. Он используется для разворота танка, стоя на одном месте. Оба стика можно комбинировать и получается полноценное управление танком, с разной скоростью и траекторией движения. Положения стиков можно менять и настраивать под себя по пиктограммам ниже
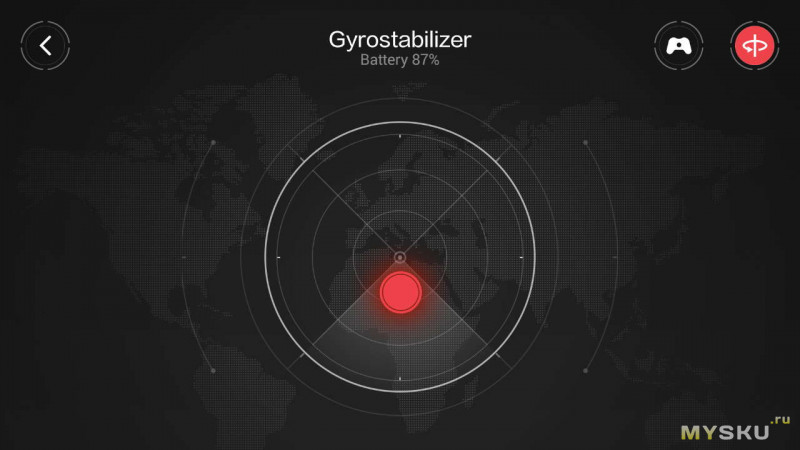
Мини-пиктограмма наверху справа включение управления танком с помощью гироскопа, встроенного в телефон
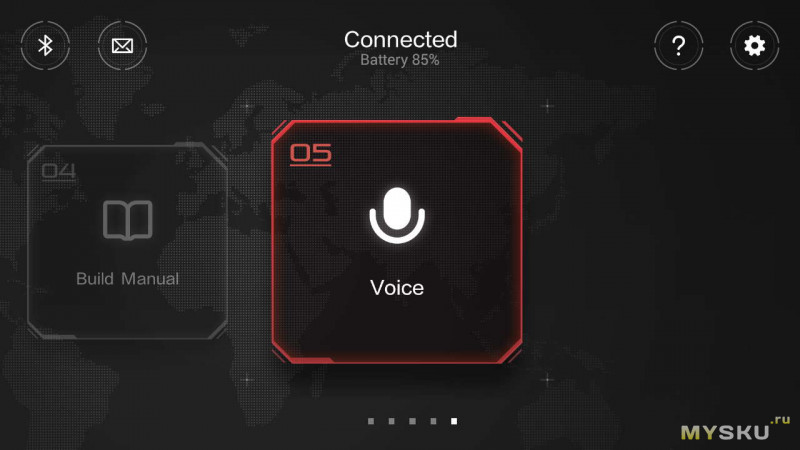
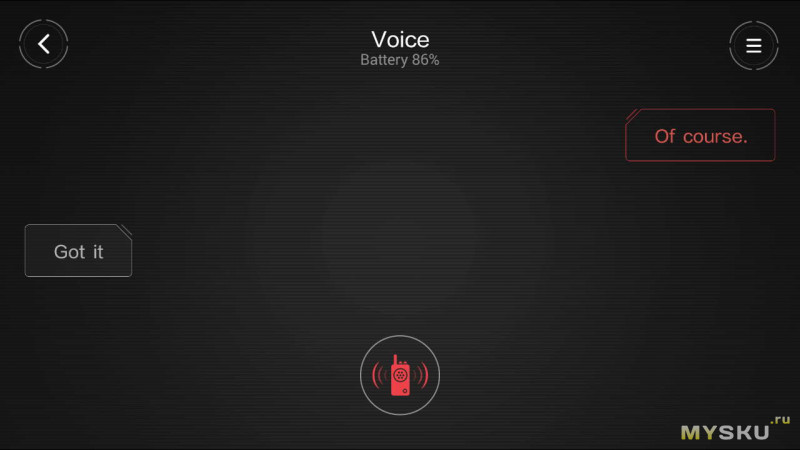
Также доступно управление танком голосом. Можно сказать по-английски «GO» — тогда танк поедет вперёд, «Back» — назад и т.д. Едет танк на полном ходу. Однако если сказать «Slow Go», команда вроде распознаётся, но скорость не снижается.Возможно баг.
Другой интересный пункт — Build Manual, откуда можно скачать другие инструкции по сборке моделей, в электронном виде
Пункт New Sensor Registration пока бесполезен, т.к. этот самый сенсор не подключен. Имеется ввиду сенсор цвета, который позволяет запрограммировать робота определённым образом, например ехать вдоль красной линии или вдоль жёлтой стены.
ВИДЕО
Выводы
Игрушка объективно — простая. Однако это не лишает меня полученного восторга по сей час. Детали выполнены качественно, если не считать мелкого недочёта в виде точечного облоя, который влияет только на внешний вид. Зато комплектное руководство по сборке робота оказалось весьма добротным — ещё более точного я не встречал ни разу, хотя конструкторов собирал в детстве много разных пластиковых и металлических, и практически всегда сталкивался с несоответствием нарисованных деталей с деталями реальными: то чёрточка где-то не дорисована, то не допечатано что-то, или деталь прямоугольная вместо квадратной, или слишком мелкая схема. Руководство по сборке робота от Xiaomi я пожалуй возведу в топ по точности и детализации сборки. К нареканиям ещё бы отнёс отсутствие запасных деталей в некоторых наборах втулок, т.к. они очень мелкие, то одну-две запросто можно потерять.
Опция рисования маршрута в программе есть, но после синхронизации с роботом, она пропадает из карусельного меню. Дальнобойность связи по Bluetooth — средняя, т.е через стену будет ловить, но если при этом отойти далеко — связь потеряется. Ёмкости аккумуляторов хватает на 2 дня в среднем.
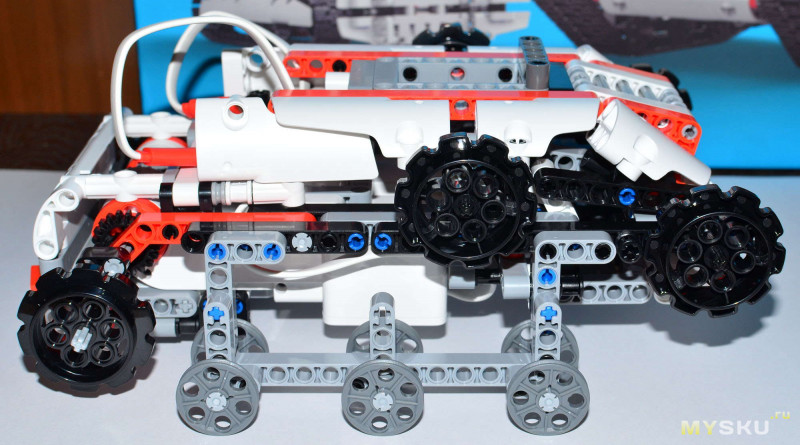
Робот на гироскутере VS. Робот-танк
Признаю, робот на балансире на двух колёсах смотрится эффектно и от этого он кажется более живым что ли… Однако вместе с этим он беспомощнее своего собрата на гусеничном ходу, поскольку он может потерять равновесие и таки упасть даже на ровном месте, что и подтвердило видео из недавнего обзора на тот робот. Что уж говорить про всякие препятствия в виде проводов, носков и плинтусов в дверных проёмах. Поэтому лично мне симпатичен — робот-танк, — он не упадёт на ровном месте, и самое главное — у него лучше проходимость. Лучше, но не идеал, поскольку внешняя сторона гусениц глянцевая и скользкая. Резиновое покрытие тут было бы очень кстати.
Достоинства
— Прилетают обновления
— Развитие мелкой моторики рук
— Качественное сцепление деталей
— Дизайн (сочетание цветов, милый вид)
— Толковая и детальная инструкция по сборке
— Восторг от процесса сборки и после окончания сборки
Недостатки
— Крепёжных втулок сыпят заподлицо, но не с запасом
— Гусеничные звенья не прорезинены
— Точечный облой на деталях
— Плоская вилка зарядника
Товар предоставлен для написания обзора магазином. Обзор опубликован в соответствии с п.18 Правил сайта.
Планирую купить+13Добавить в избранноеОбзор понравился+21
+48
Делать много фото — моя привычка, которая выработалась ещё задолго до того, как я впервые узнал, что китайские магазины практикуют бесплатную раздачу товаров. Это не прерогатива п.18
Отсюда следует, что купив бы сабж за полную стоимость, количество фото в обзоре было бы таким же, или даже больше. Прошу не путать мою привычку и «вежливый тон» написания обзоров п18.
Можно сделать отличный обзор с содержательными фото, а можно напихать фотографий которые не несут никакой информации. Много фоток ни о чем проходить только с примеркой женского белья. В данном случае 70% фоток ни о чем.
Так Вы уж определитесь, в чём Ваше нарекание к обзору. К «отработке пункта18 количеством фото» или к «неочёмности» фотографий. По первому я уже выше сказал. Если второе, то да, могу признать, что в обзоре много однотипных фото, но они идут группами, так что не вижу проблем пролистать их, если не интересно. Всю необходимую информацию я тоже дал (если нет, укажите, что упустил).
Пока за собой вижу одно упущение — надо было применить содержание и якори в текст, чтобы можно было по одному клику перемещаться сразу в тот раздел, который нужен.
В mindstorms, насколько я понимаю, используется i2c. Тут на один привод 7 проводов — основная логика размещена в центральном блоке управления. Так что разве что через ардуину.
эээ… фотки платы есть с обеих сторон. НО! Антенна только одна — от нрфки. А на ней двусторонний канал бле не поднимается… Блинн… Я в замешательстве… КАК??!!!
побаловаться — да, расчитывать на программинг не приходится — сий девайс всухую проигрывает lego mindstorm… да — разница в ценнике в 4 раза но на его фоне МИТУ прочто бесполезная игрушка
Вполне возможно, что существует альтернативное и более функциональное ПО по программированию данного чуда техники, как и для того же майндстормс. Очень сомневаюсь, что разработчики запарились этой игрушкой настолько, что для программирования его написали свой язык
дело не в ПО а наличии всяких сенсоров, коих под майндсторм овер дохрена а в МИТУ — касания, света-цвета и вроде как я слышал про ультразвуковой… а ну и гтроскоп
























 .
.






















































P.S. Вы бы фотки под спойлер убрали
— Что ты сегодня будешь делать?
— Буду играть с няней или железной дорогой. — Зависит от того, что выберет себе папа.
:)
Вот пара моих не 18-пунктовых обзоров. Можете тупо пролистать, если угодно.
mySKU.me/blog/ebay/53178.html (трафик)
mySKU.me/blog/jd/39868.html (трафик)
Отсюда следует, что купив бы сабж за полную стоимость, количество фото в обзоре было бы таким же, или даже больше. Прошу не путать мою привычку и «вежливый тон» написания обзоров п18.
Пока за собой вижу одно упущение — надо было применить содержание и якори в текст, чтобы можно было по одному клику перемещаться сразу в тот раздел, который нужен.
+
Что стоит их спрятать под спойлер???