Arduino – под этим названием объединено несколько популярных печатных плат, которые имеют стандартизированное расположение всех выводов для микроконтроллеров, а также одинаковые габариты в границах одной модели продукта. Некоторые из них имеют дополнительные элементы, позволяющие осуществлять контроль напряжения подаваемого питания и USB, который благодаря своей универсальности может и подзаряжать плату, и использоваться для связи микроконтроллера с компьютером. Одной из наилучших вариаций семейства этих плат является модель Arduino UNO R3.
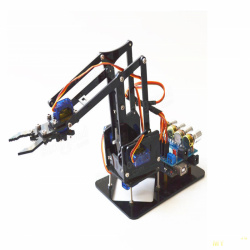
Моя профессия связана с электроникой, но сам я не любитель радиоуправляемых и всякого рода моделей, работающих под управлением микроконтроллеров. Правда, на предложение магазина выслать на обзор мне механическую руку (далее захват) я ответил положительно, данный конструктор меня заинтересовал прежде всего тем что понравится моему ребенку, а во-вторых устройство напомнило мне механический манипулятор в лабораториях фантастических фильмов.
Данный конструктор поставляется в полностью разобранном виде вот в такой антивандальной коробочке из пенопласта:
Внутри все лежит валом, некоторые детали отдельно по пакетикам:
Содержимое коробки:
-1x 4DOF Robot Arm Kit
-4x sg90 Servo
-1x Arduino uno r3 Board
-1x Potentiometer Control Board
-1x 5V 2A Power Adapter
Название модели: 4DOF Robot Arm Kit
Материал: Акрил
Возраст 8+
Вес: ок. 450 гр.
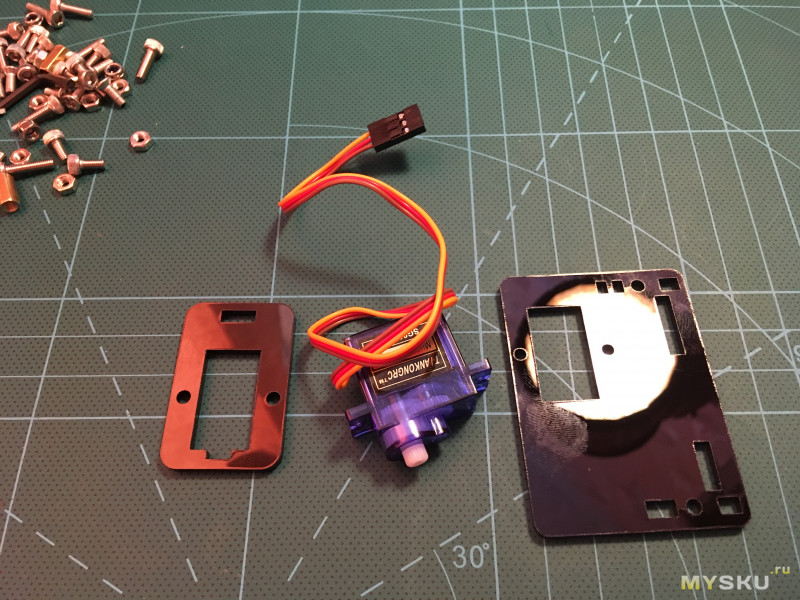
Сервомоторы тип sg90
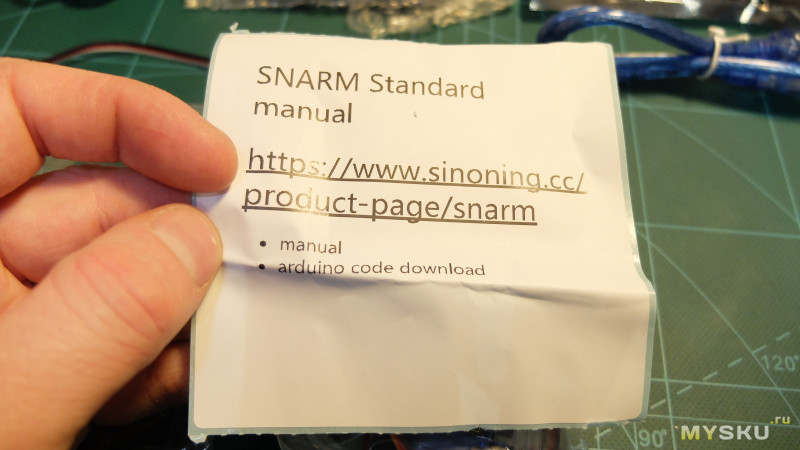
Первое, на что я обратил внимание, это вот такая бумажка со ссылкой на сайт (я так понял производителя), где можно найти инструкцию по сборке, а также скачать софт при необходимости:
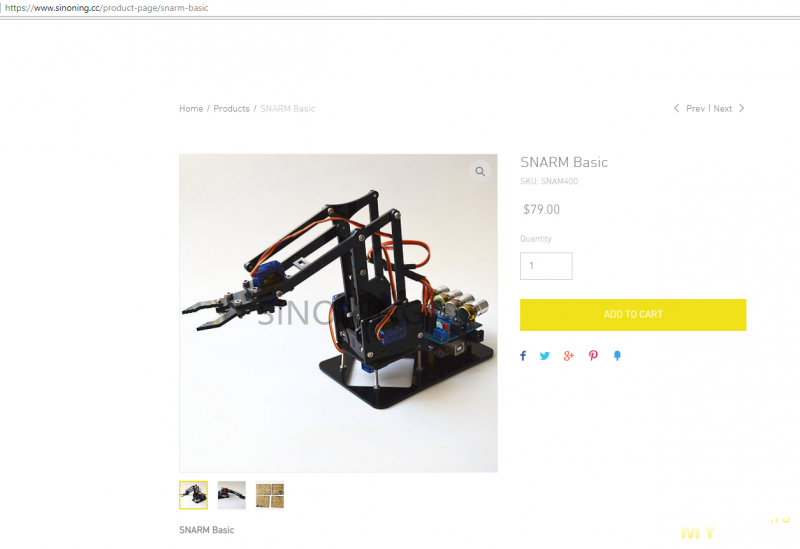
Идем на сайт, и видим все продукты и различные варианты нашего захвата.
Модель наша называется, как я понял, SNARM Basic
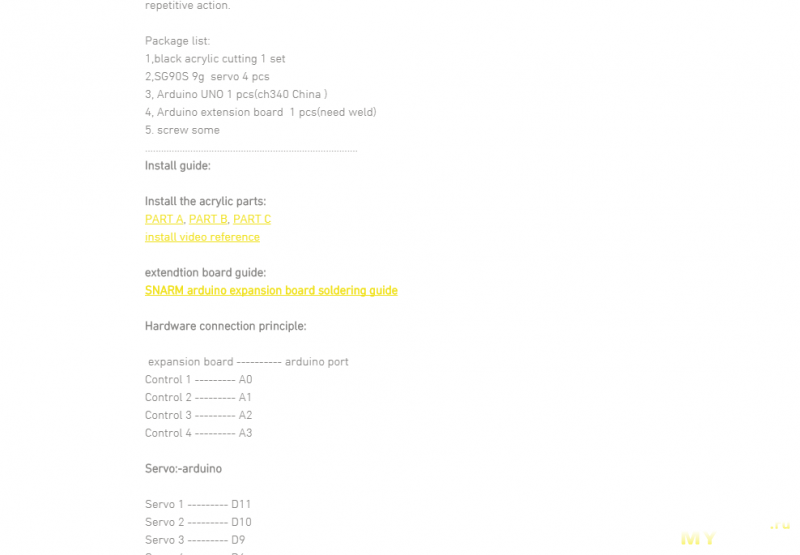
Тут же находим инструкцию по сборке:
Как пример:
Теперь к компонентам.
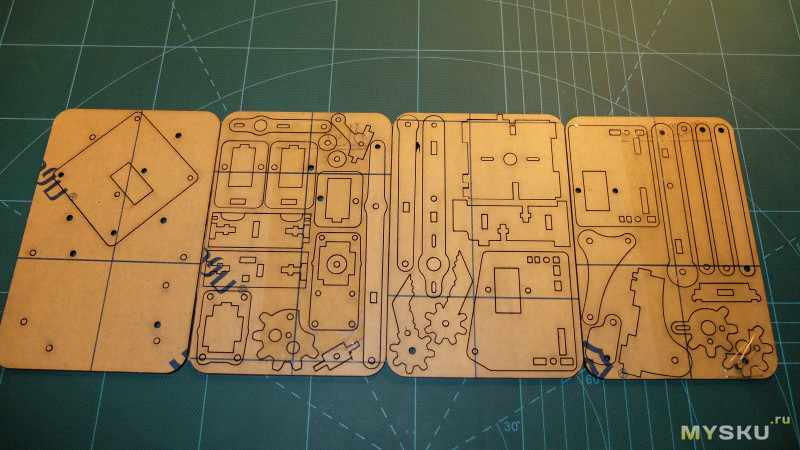
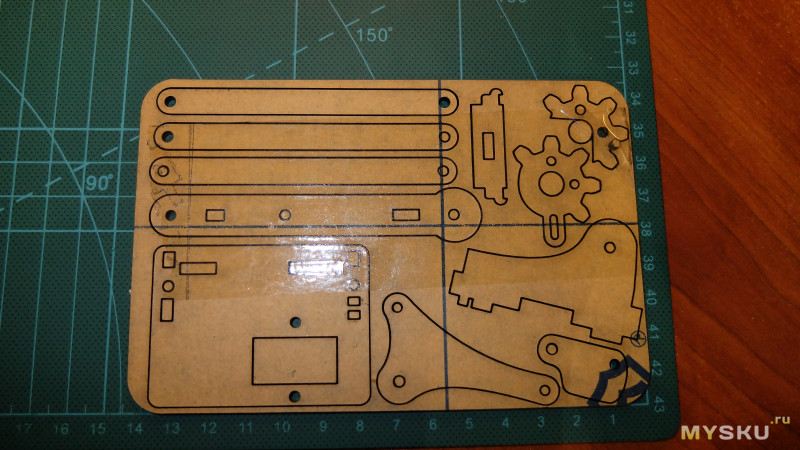
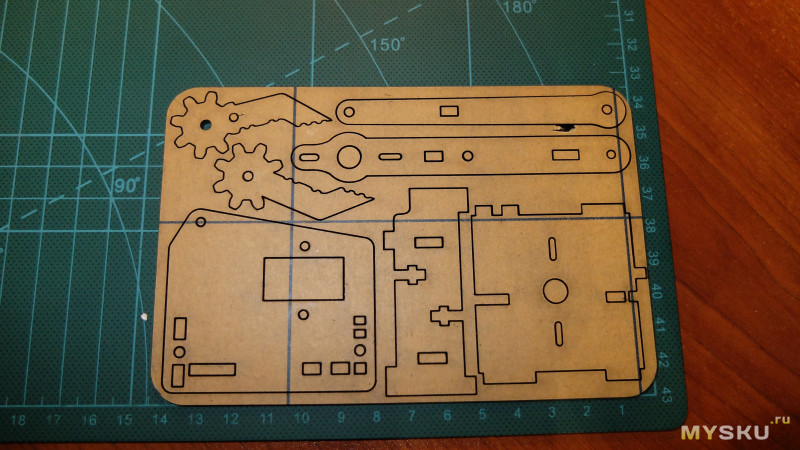
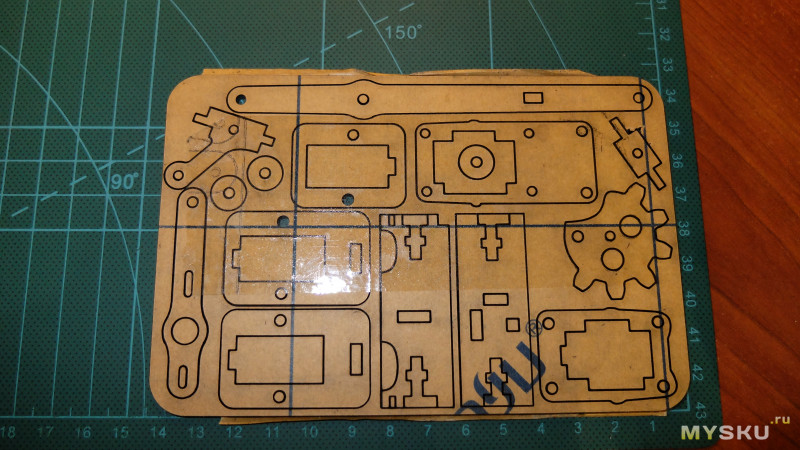
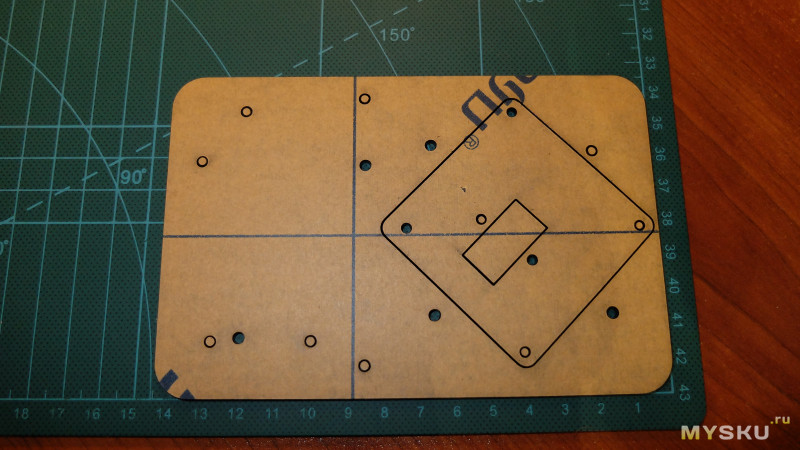
Детали механической части сделаны из акрила, вырезаны на станке чпу лазером и скреплены вместе посредством защитной самоклеящейся пленки (бумаги):
Отдельно:
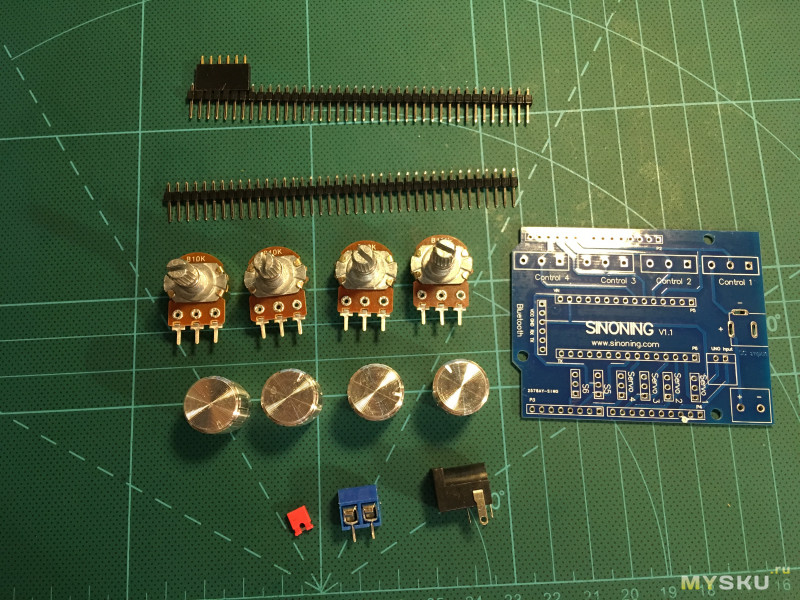
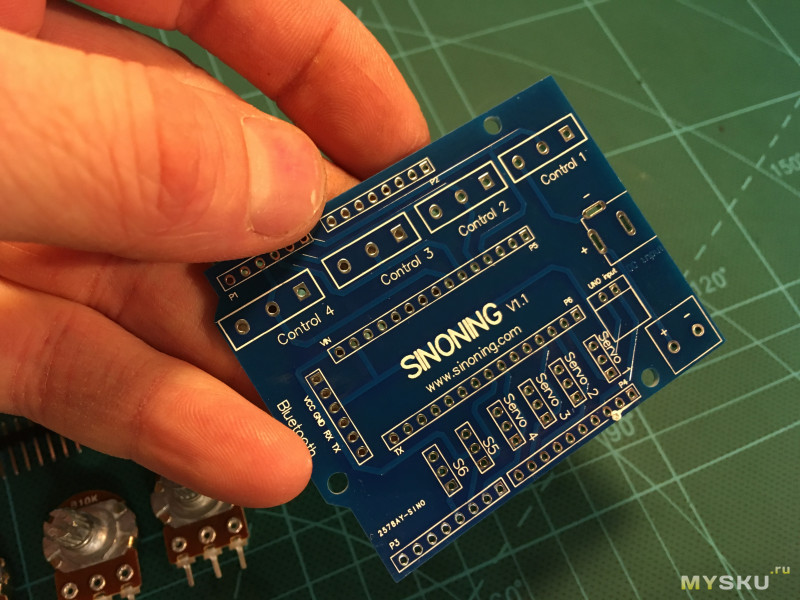
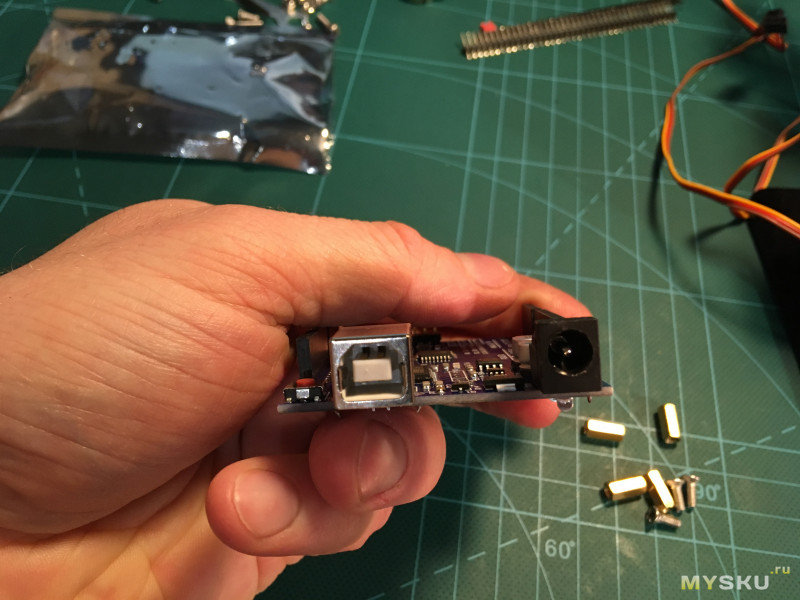
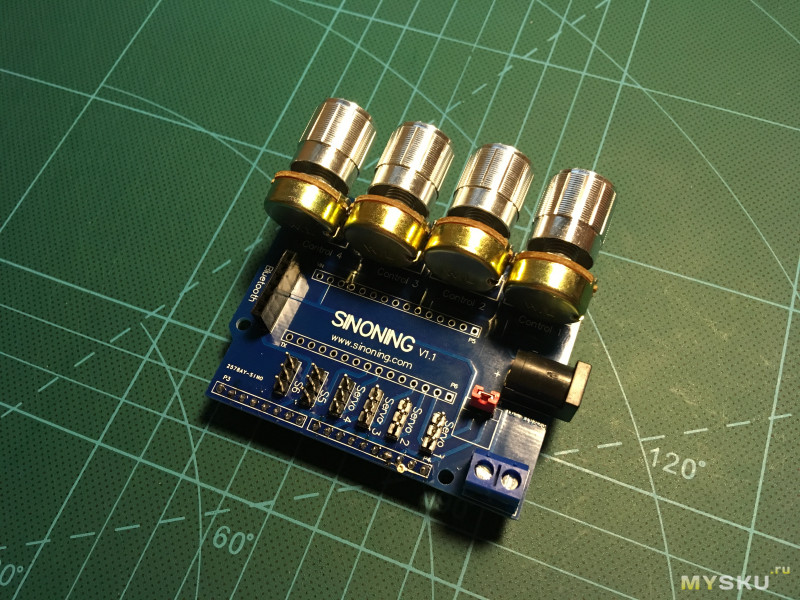
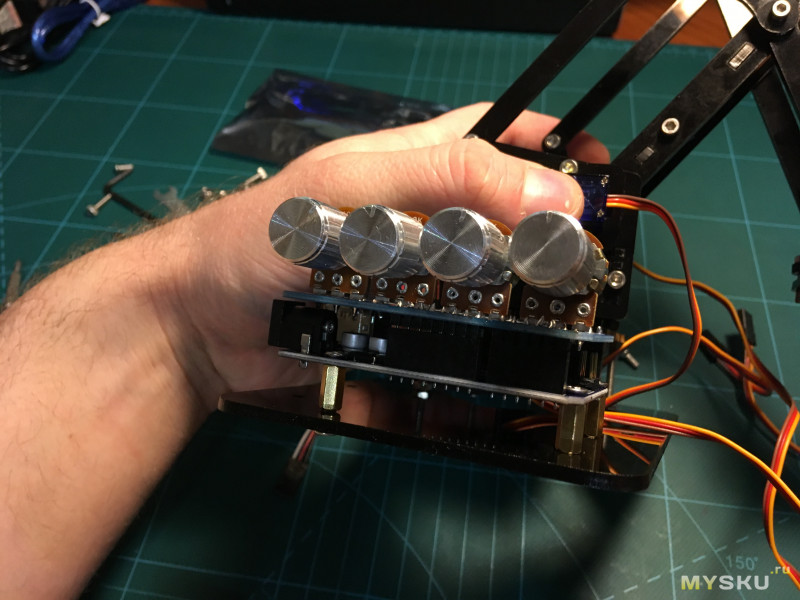
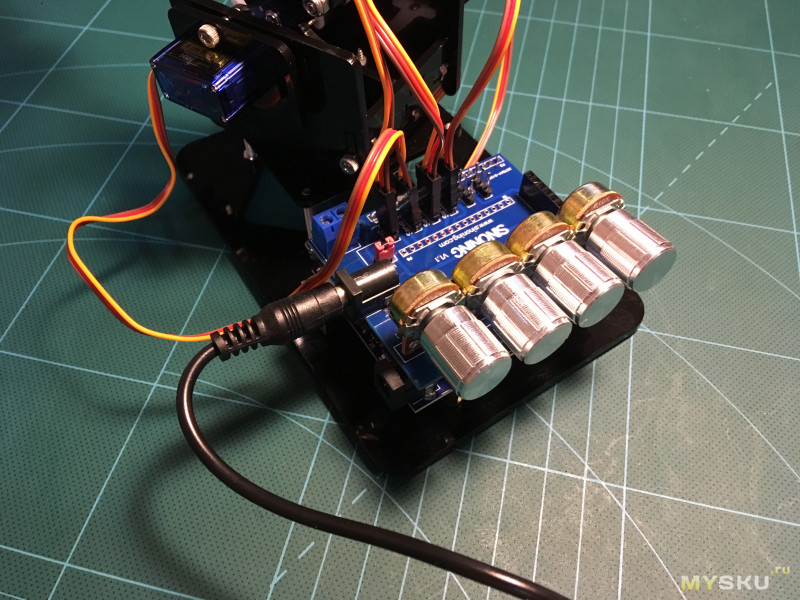
В пакетике имеем плату ручного управления, она же плата питания:
Компоненты:
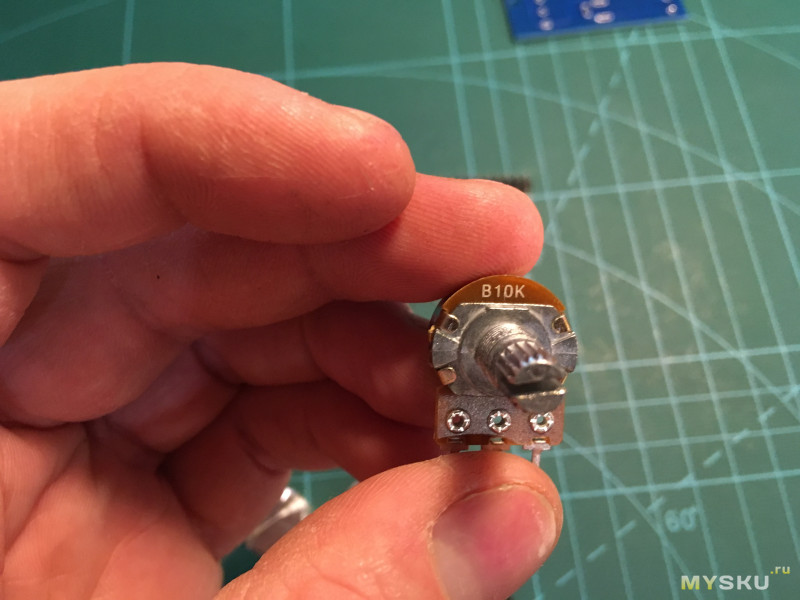
Регулировочные резисторы на 10кОм:
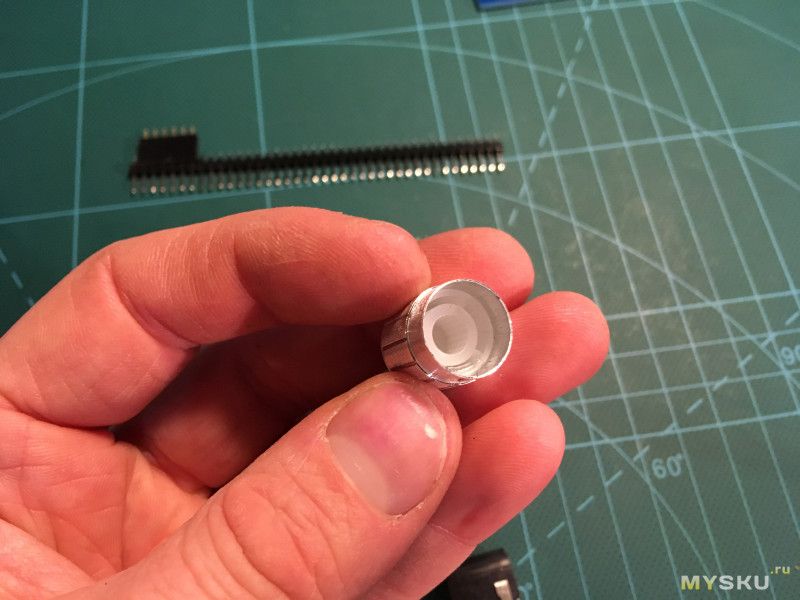
Рукоятки- крутилки:
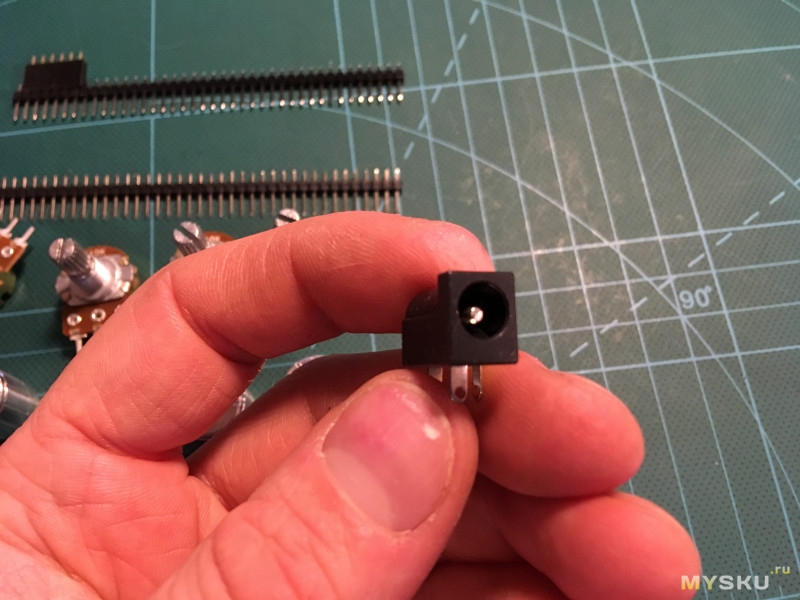
Разъем для питания:
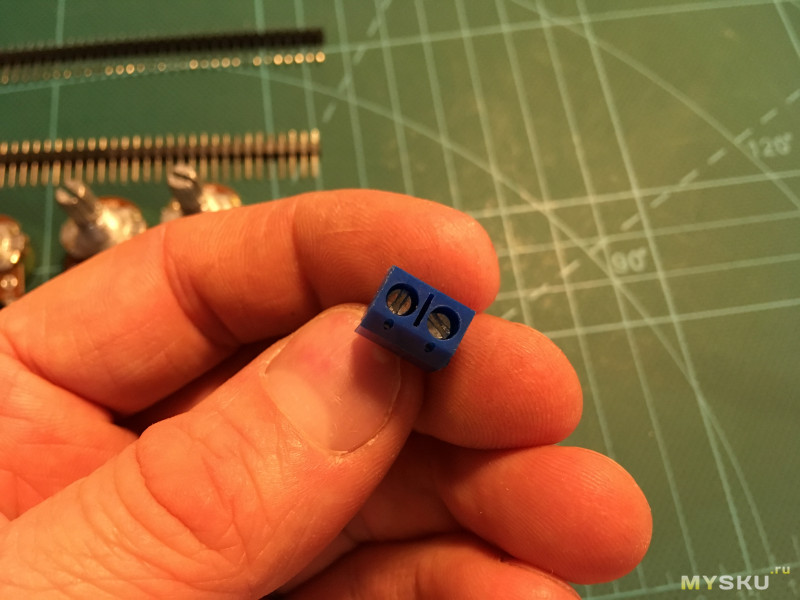
Винтовой разъем для питания:
Джампер:
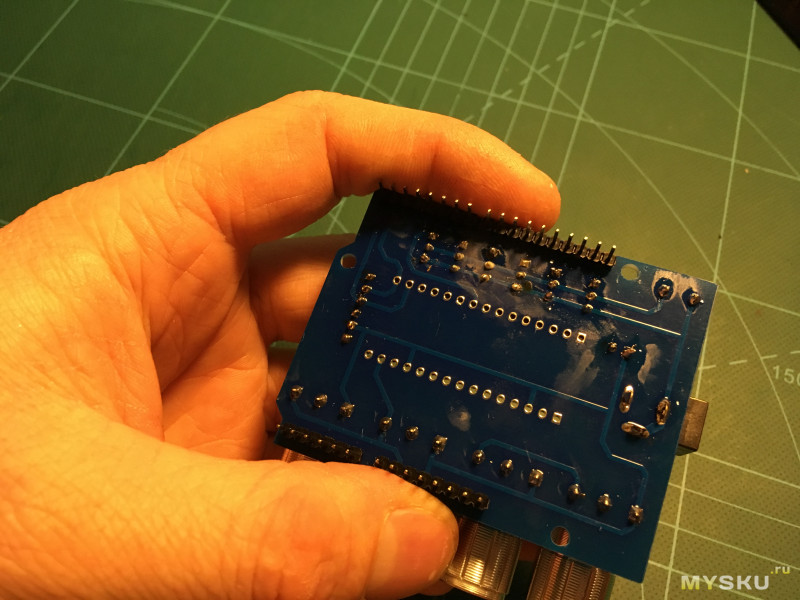
Как стало понятно, эту плату нужно распаять.
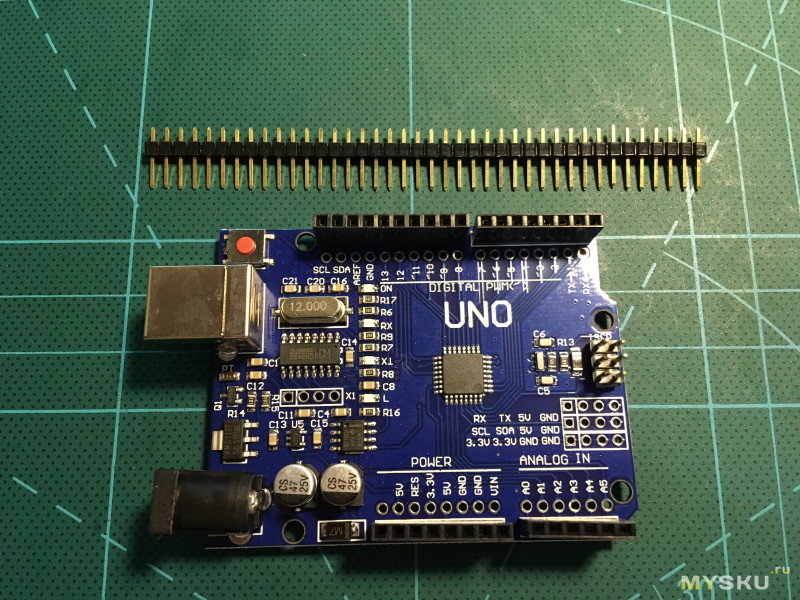
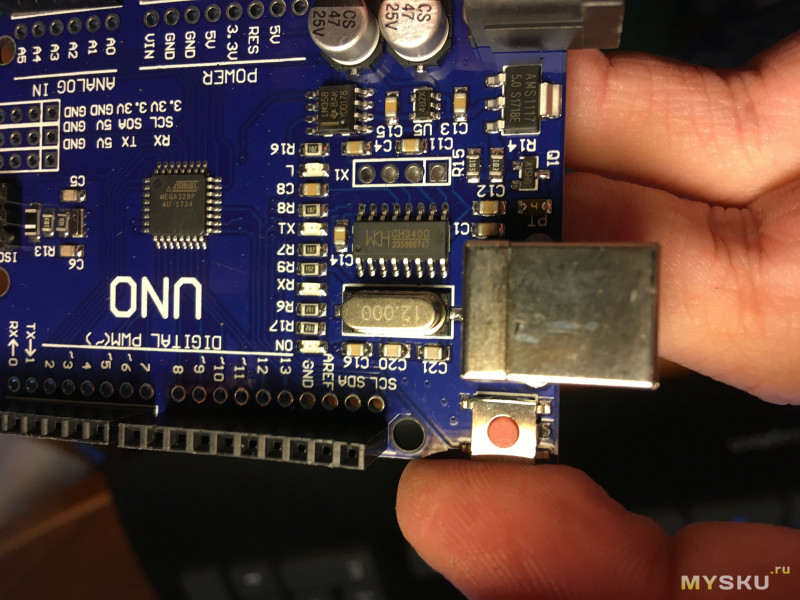
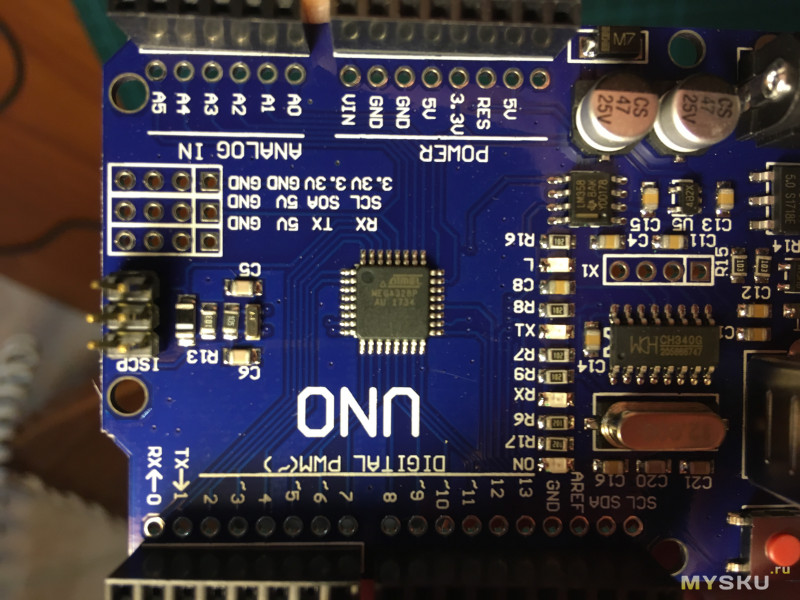
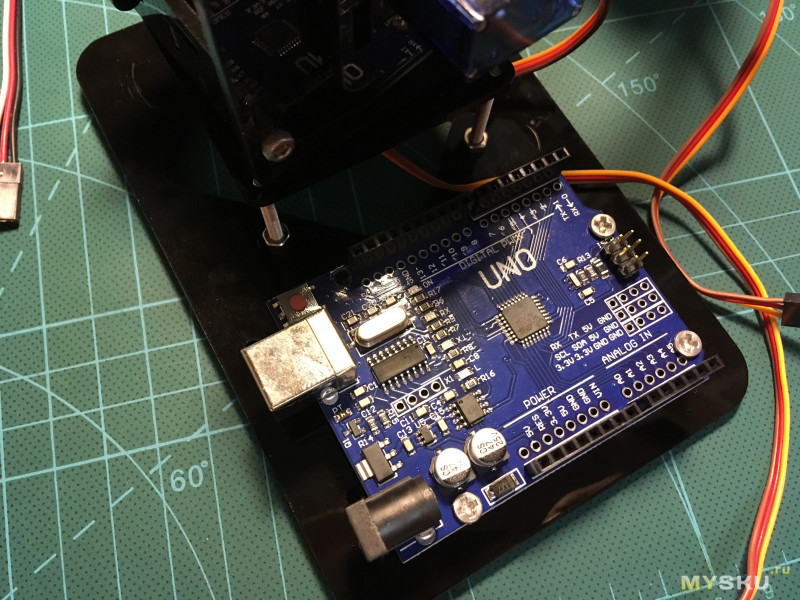
Теперь плата управления сервомоторами Arduino UNO R3:
Имеет собственный разъем питания, а также разъем USB type-B для соединения с компьютером:
Рабочее напряжение составляет 5 В. Но вход для внешнего питания рассчитан на 7-12 В. Экспериментально было установлено, что для работы хватает минимального напряжения 6 В, а максимум, который плата может выдержать, – 20 В. Но лучше не отклоняться от рекомендованных параметров, чтобы не было нежелательных ситуаций, как-то выход из строя и ему подобные варианты, зависимые от подачи напряжения. Система энергоснабжения устроена таким образом, что происходит автоматическое переключение с USB-порта на другой источник энергии, если последний подаёт больше 6,7 В. Такие требования к предоставляемому напряжению для Arduino UNO R3, схема подключения и питания были разработаны для оптимальной работы платы.
Преимущества работы с различными напряжениями этим не ограничиваются. Плата Arduino UNO R3 может заставить работать МК и на более низком (3,3 В) напряжении, но только из-за того, что он сам функционирует на частоте 8 МГц. Плата же требует 16 МГц и, соответственно, большего напряжения.
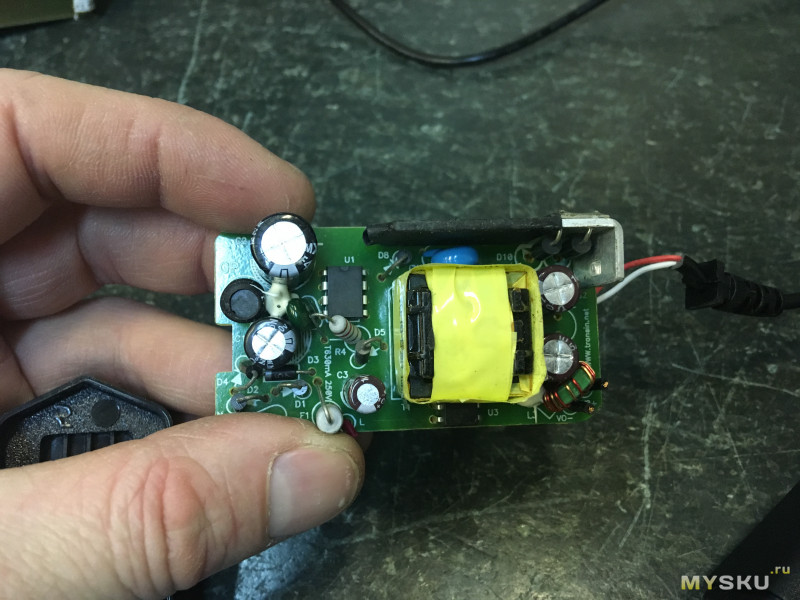
Адаптер питания, который идет в комплекте, рассчитан на питание от сети переменного напряжения 100-240 В, однако имеет американскую вилку, в чем есть некоторое неудобство.
Выдает, судя по шильду, 5В 2А. (ps. к сожалению, на момент написания обзора адаптер внезапно умер =), пришлось запитать от другого).
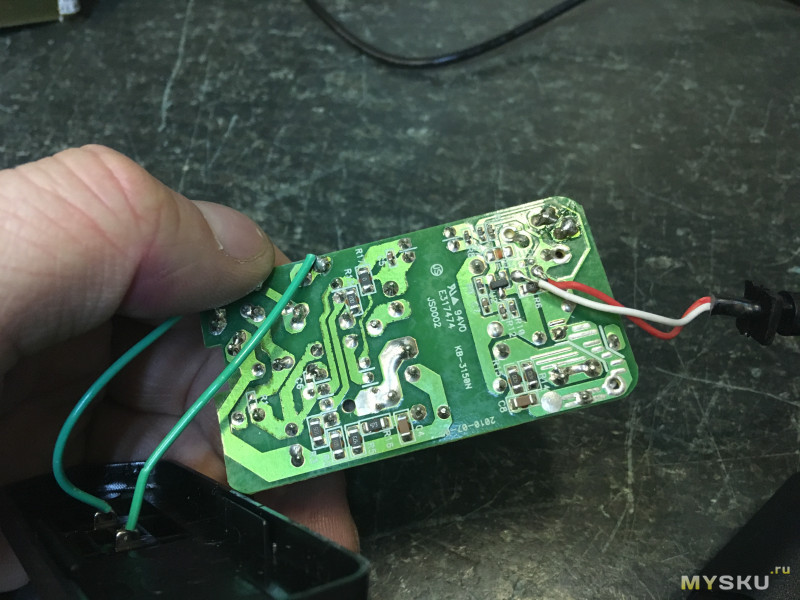
Проверил блок под нагрузкой- не запускается. Разобрал:
Где тут 2А то?
Микросхема chip-rail cr6203 по даташиту выдаёт максимальный ток 600 мА.
В комплекте имеется ключик-шестигранник для сборки, а также маленький гаечный ключ:
Приступаем к сборке.
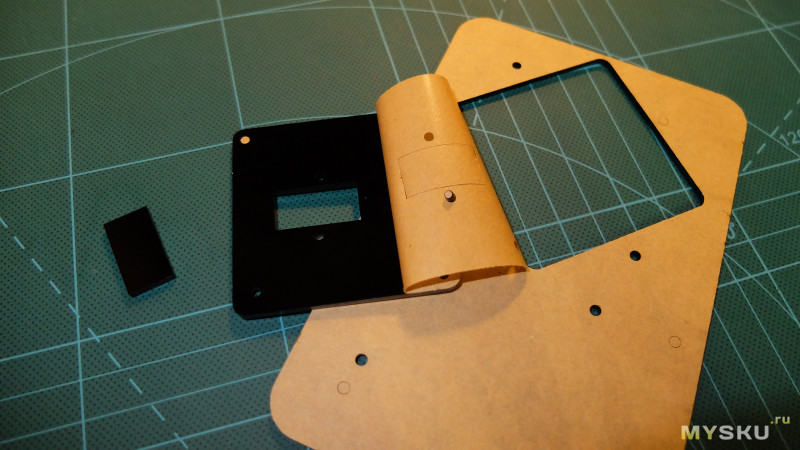
Все детали нужно вынуть из формы и очистить от пленки:
Процесс сборки
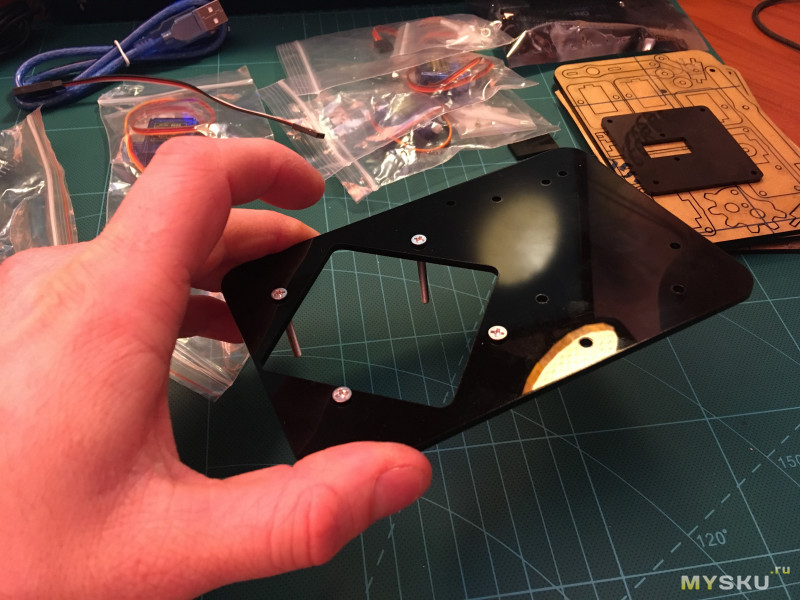
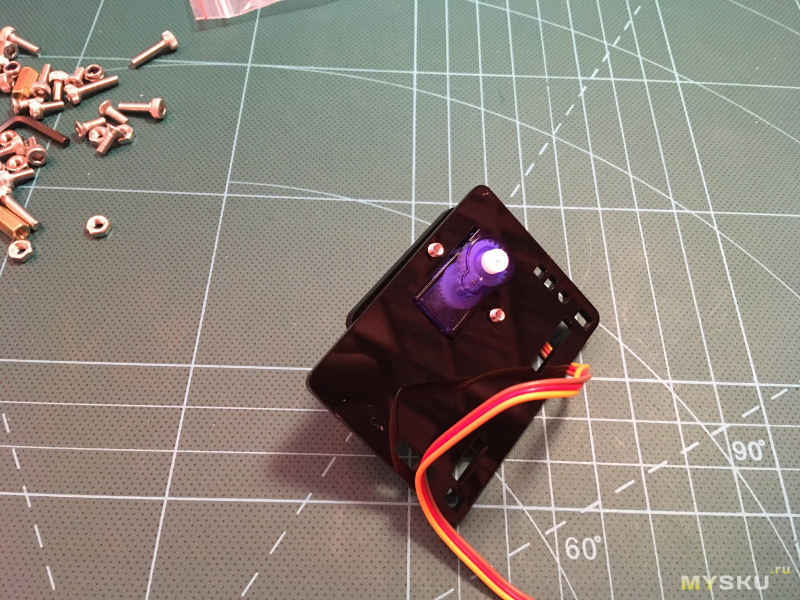
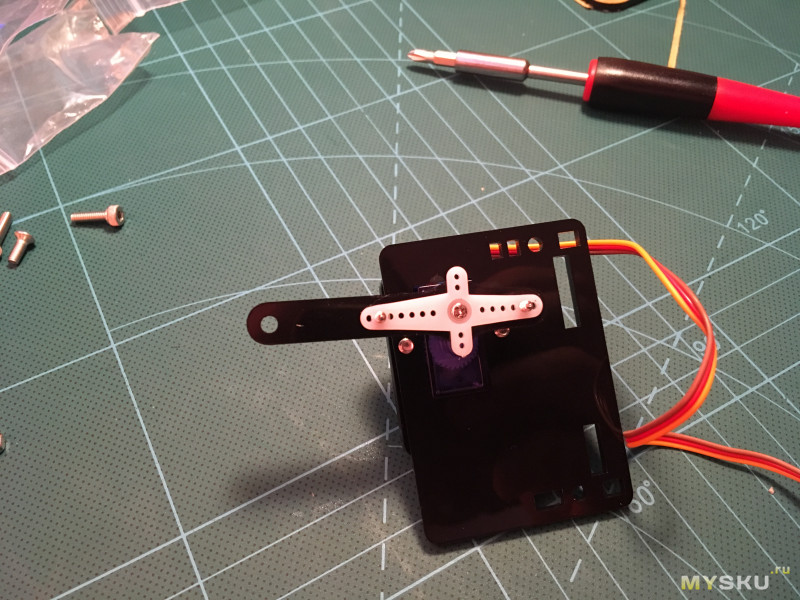
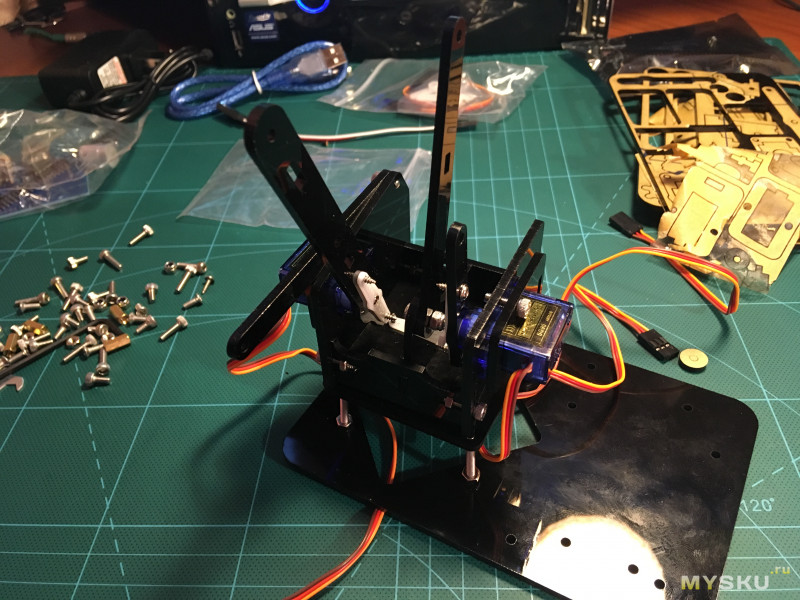
Собираем основание:
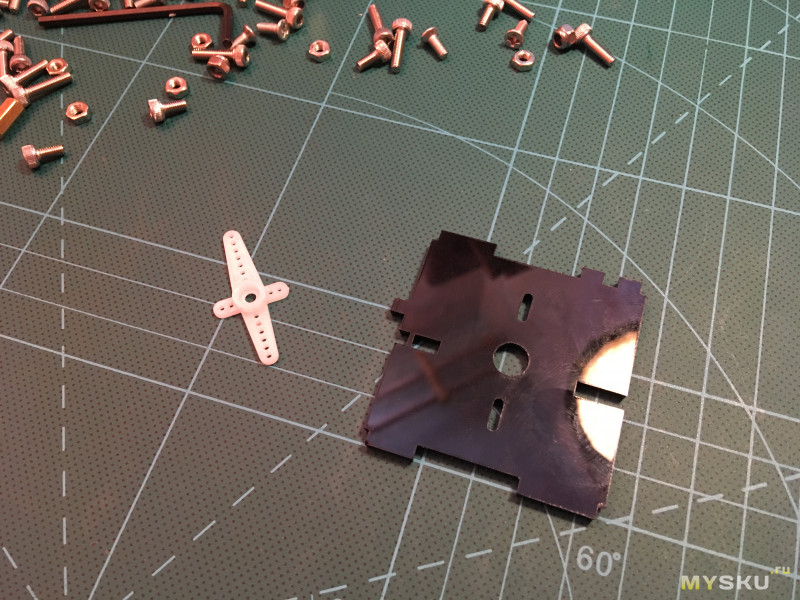
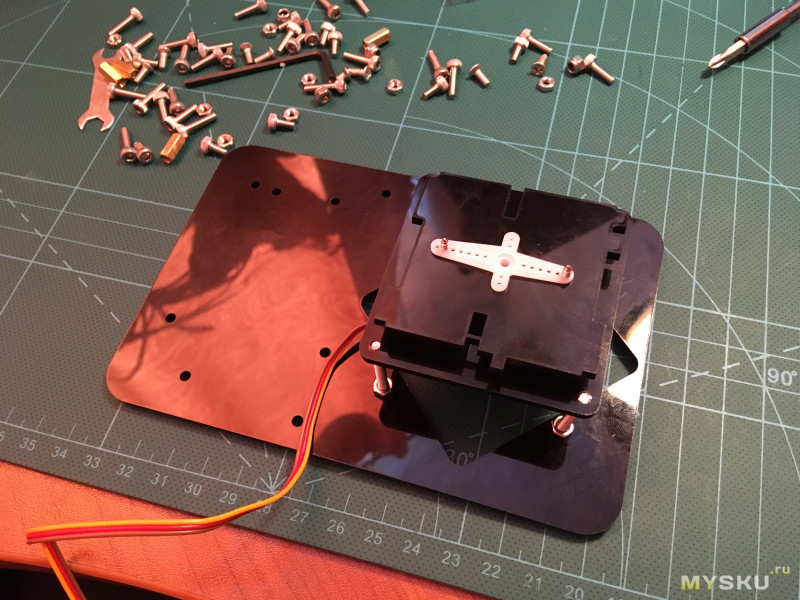
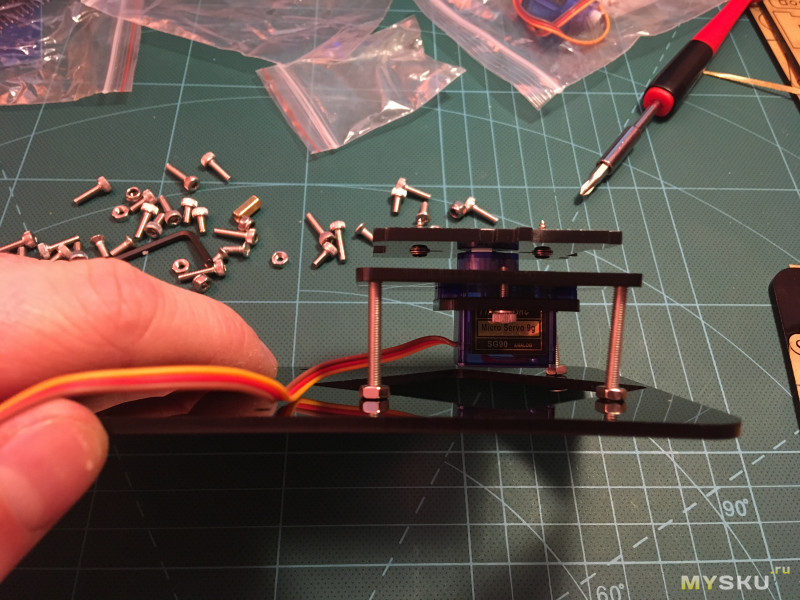
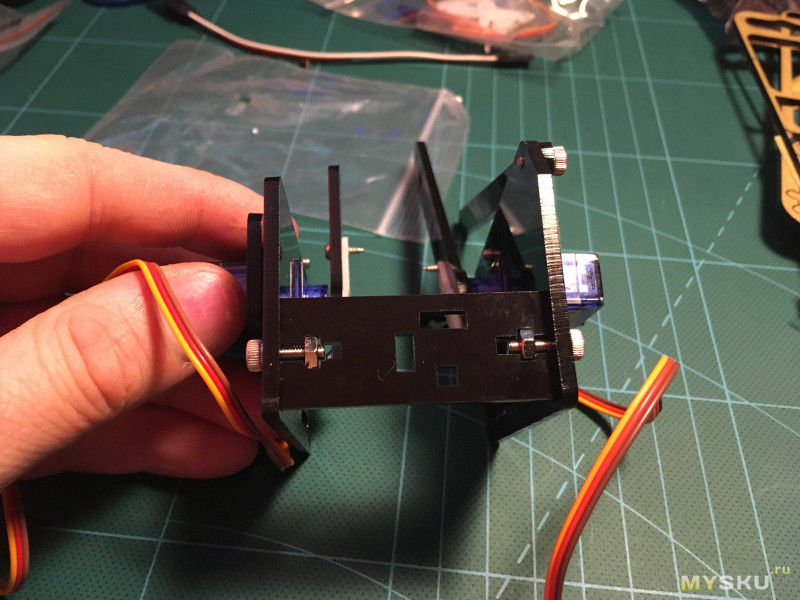
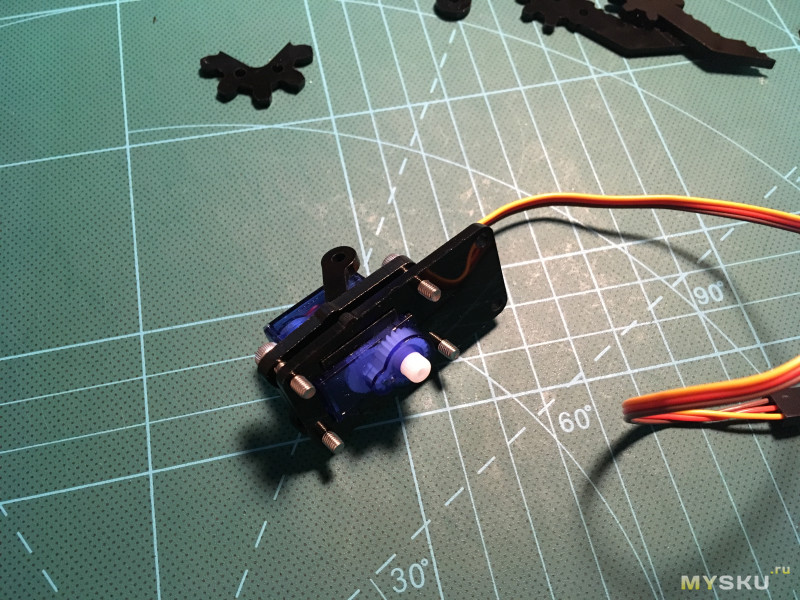
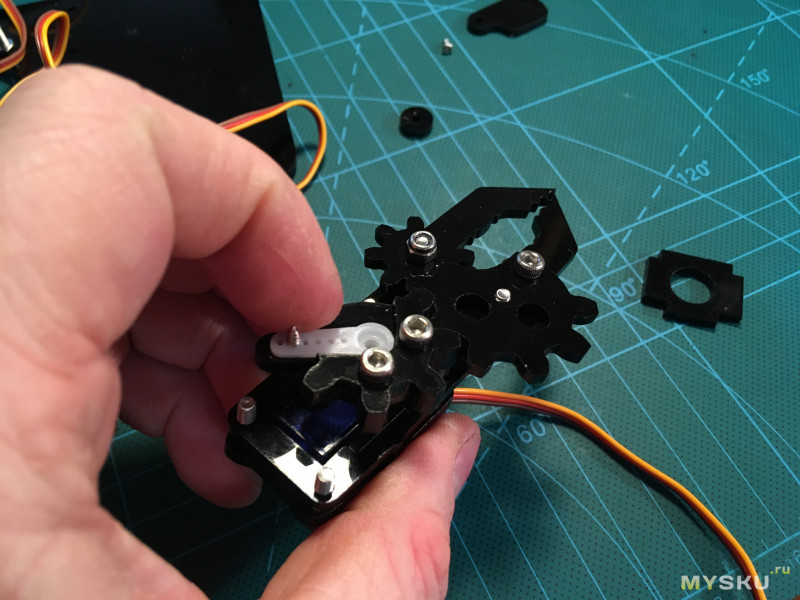
Теперь нужно собрать крепление сервопривода поворотной площадки:
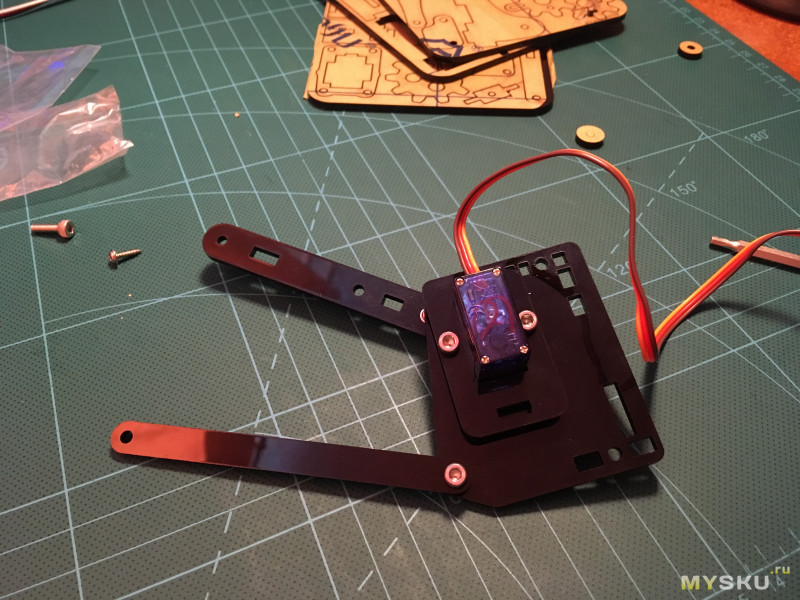
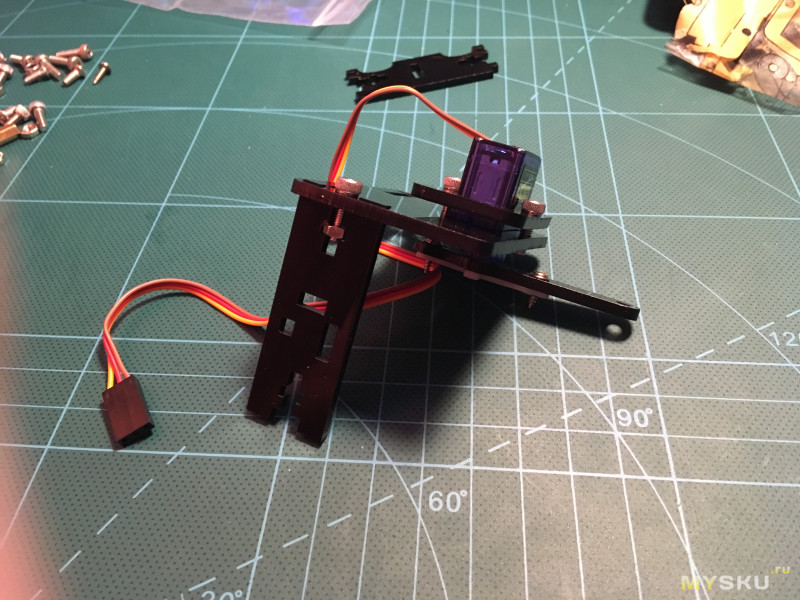
Соединяем вместе:
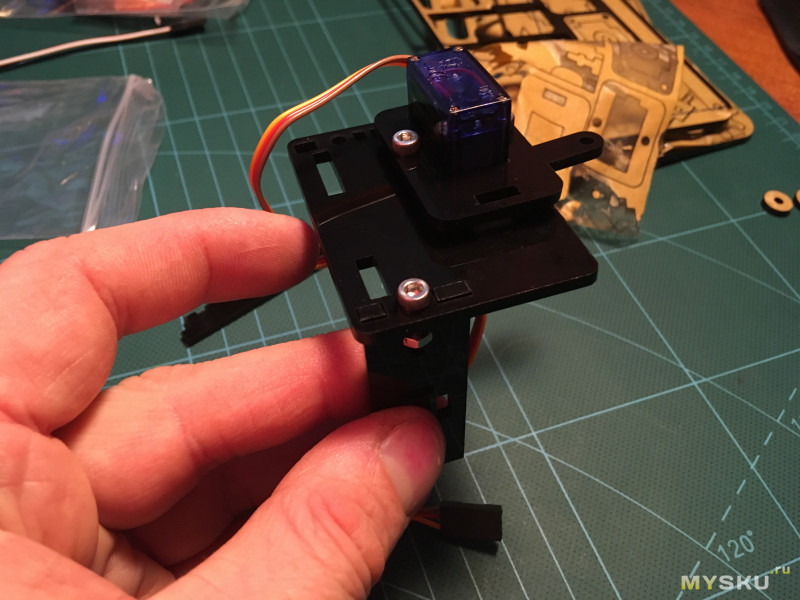
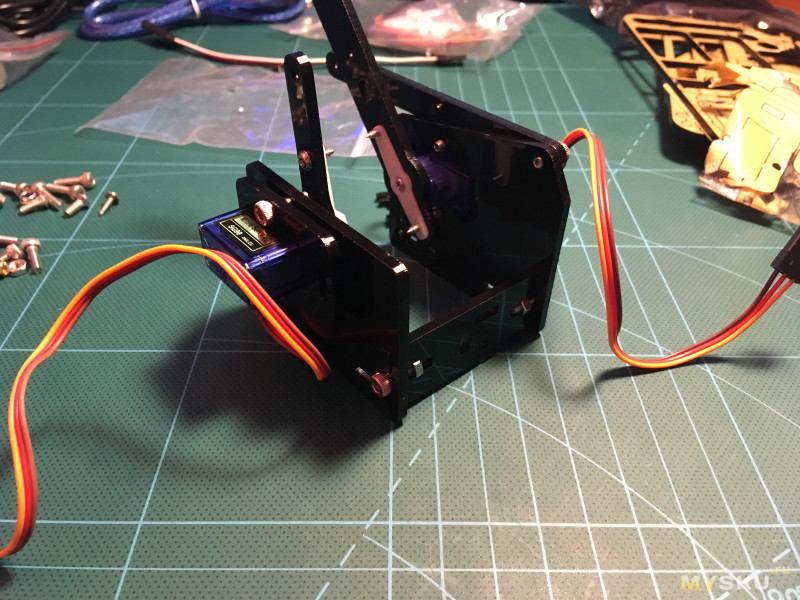
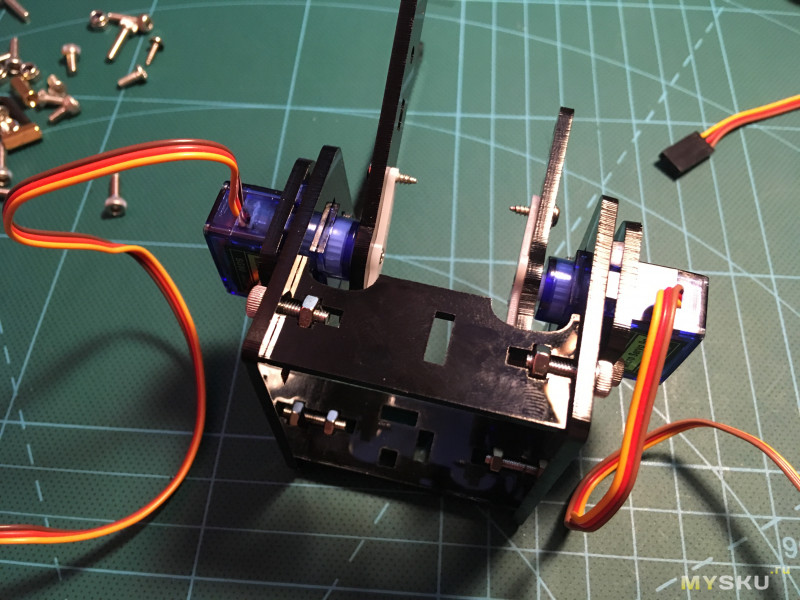
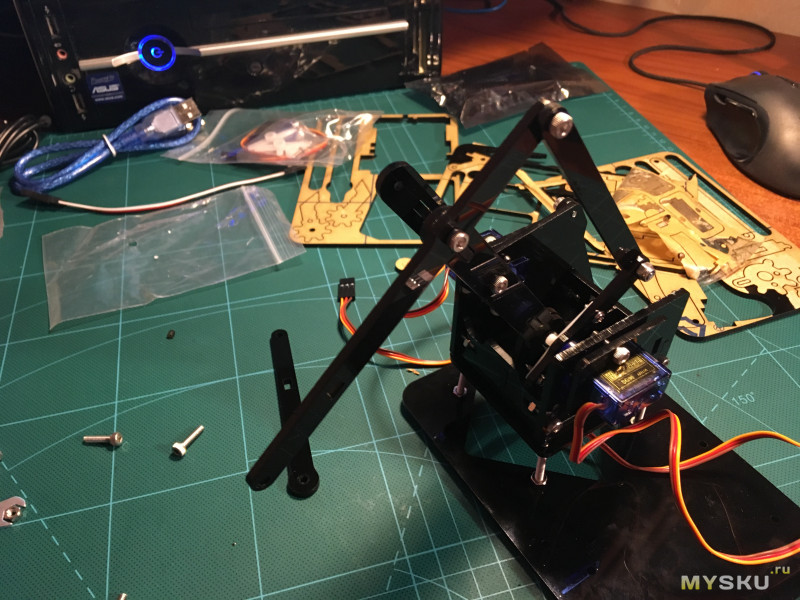
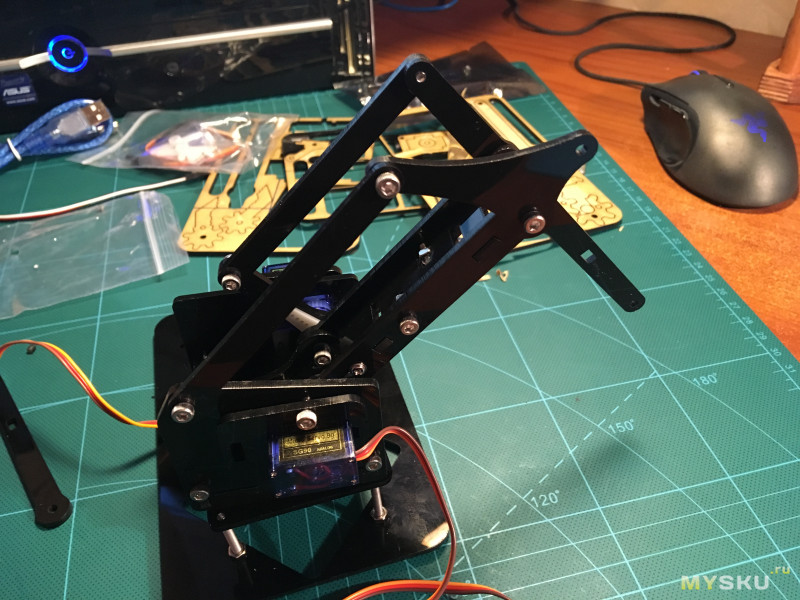
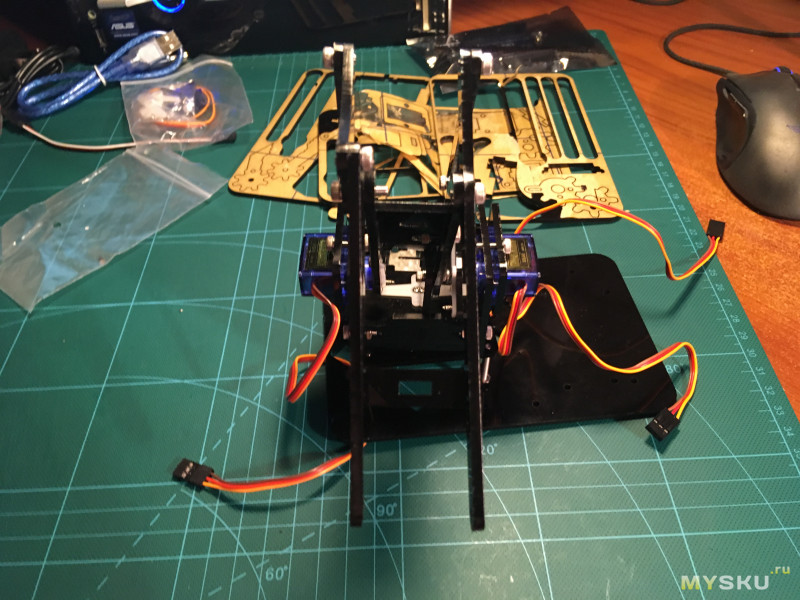
Далее по тому же принципу собираем остальные детали:
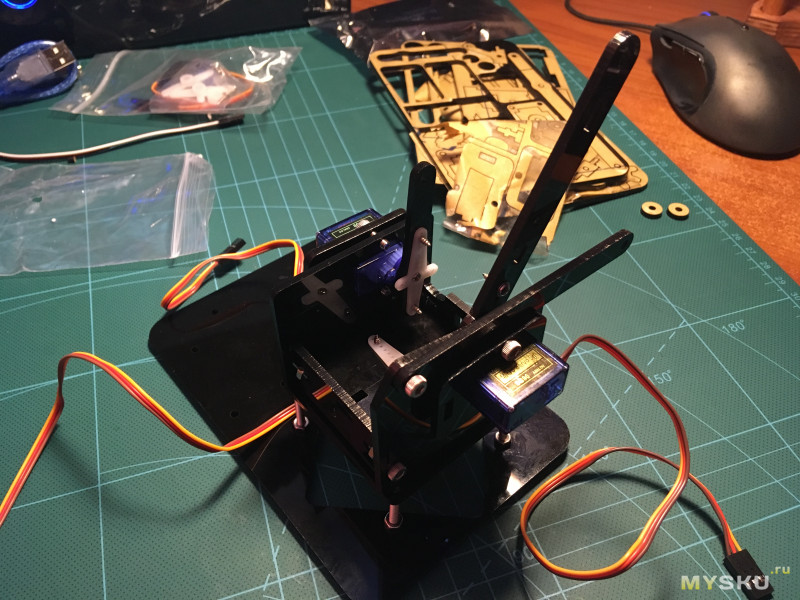
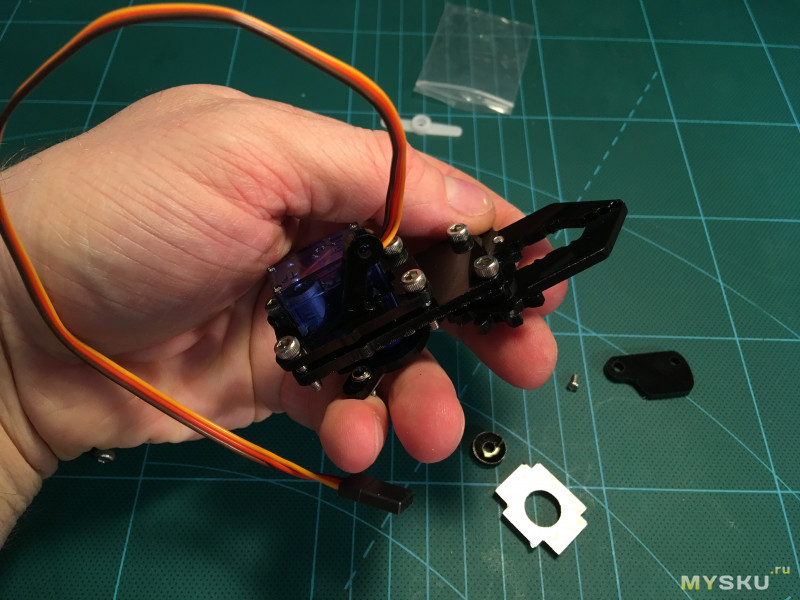
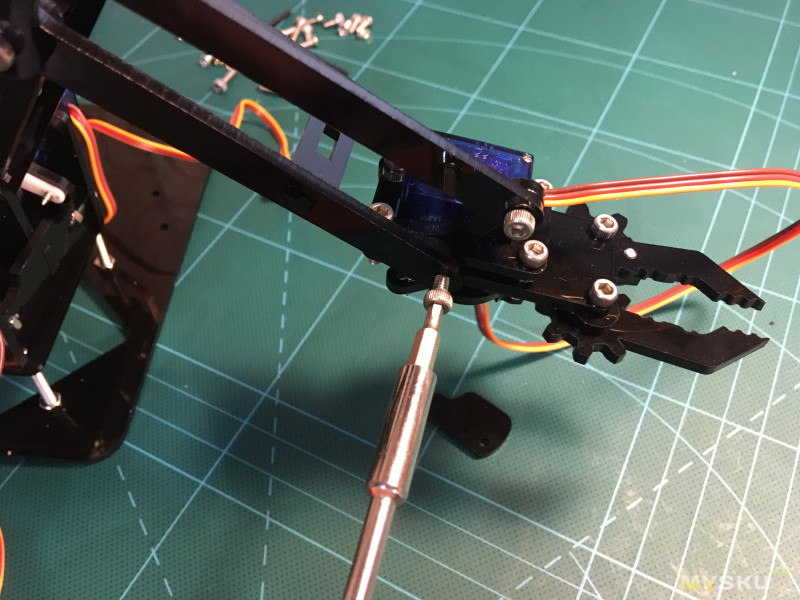
Осталось собрать захват:
Крепим к основному механизму:
У меня остались лишние детали. Я так и не понял откуда они или куда… на схеме их не нашел. Без них все работает, так что лишние)
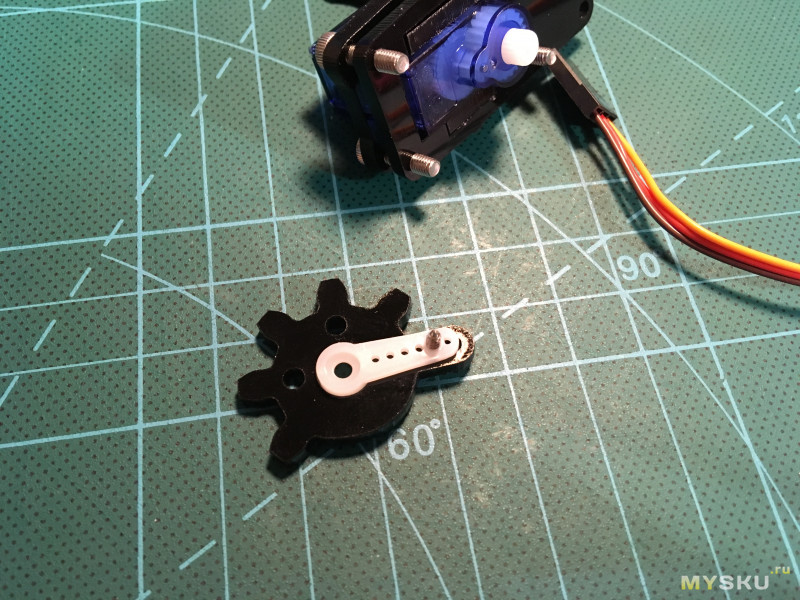
Также есть запасные шестеренки для приводов:
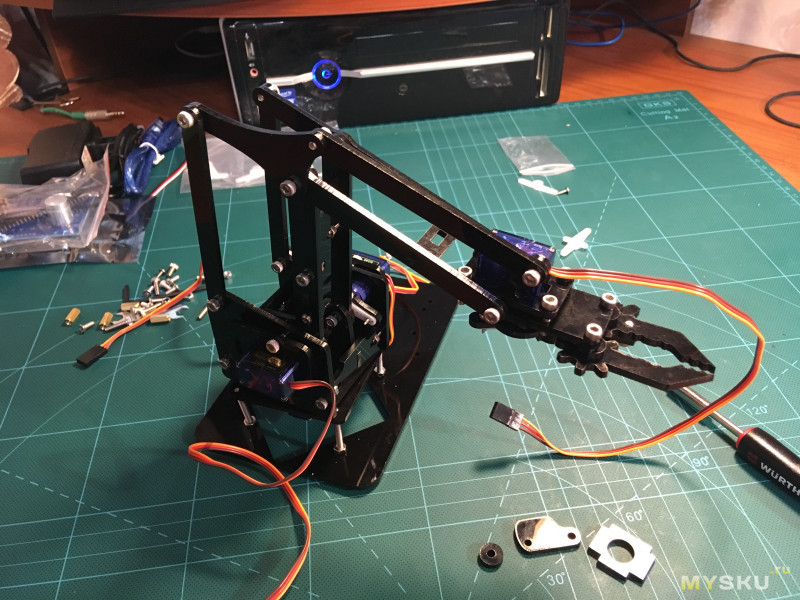
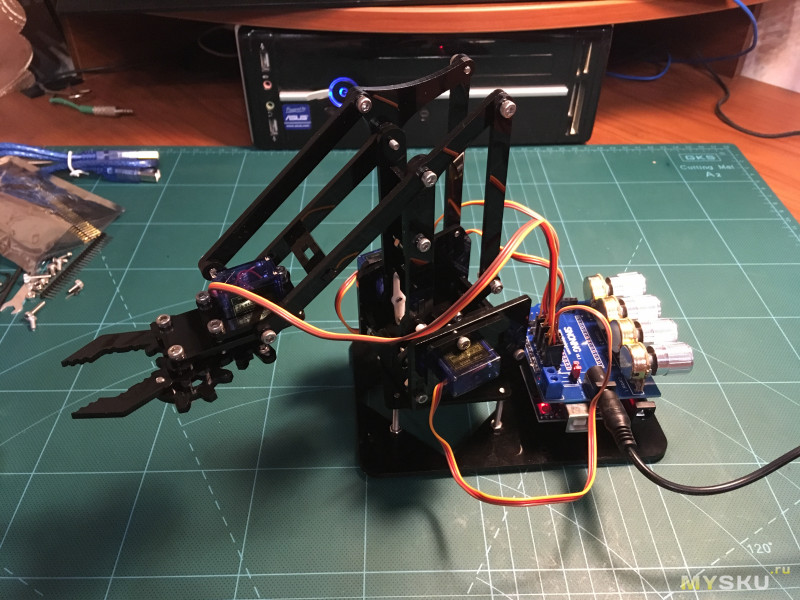
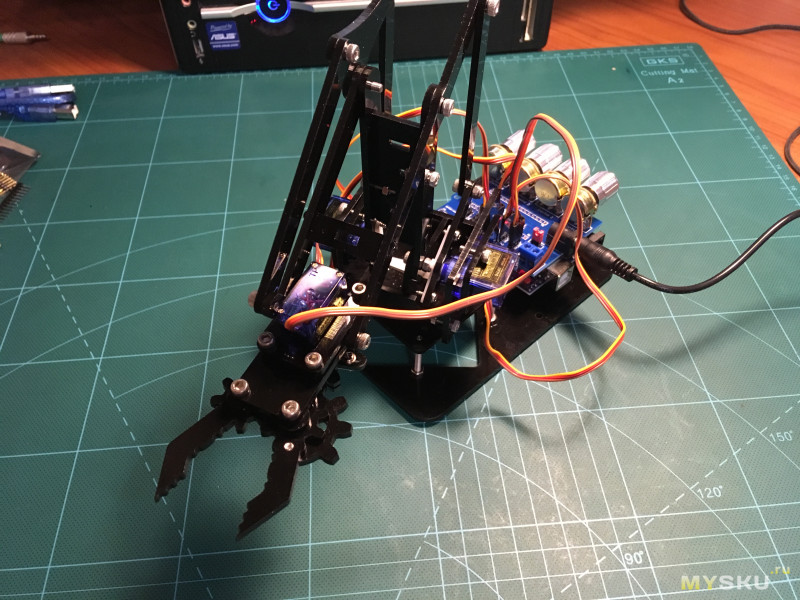
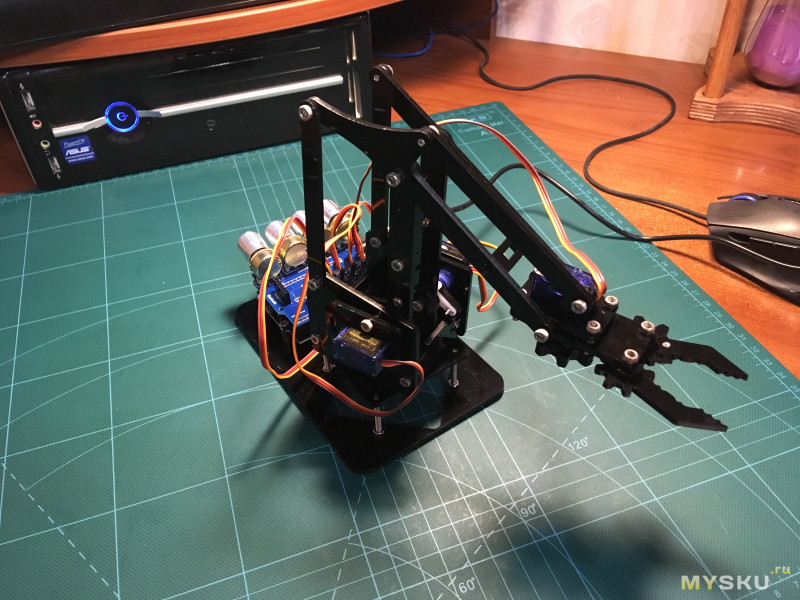
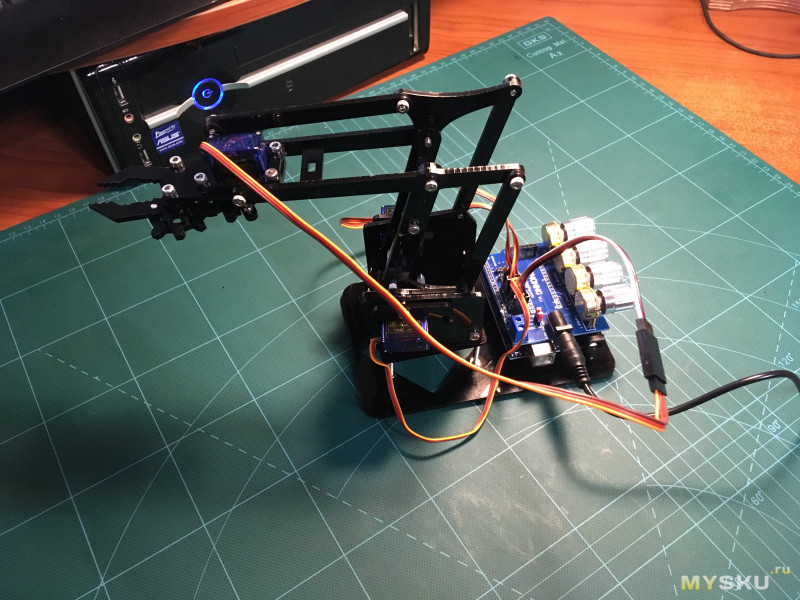
Готовый механизм:
Теперь нужно распаять вторую плату. Обращаю внимание на разъем bluetooth. Сюда можно подключить модуль для беспроводного управления:
Крепим плату Arduino UNO R3 на основание с помощью трех винтов:
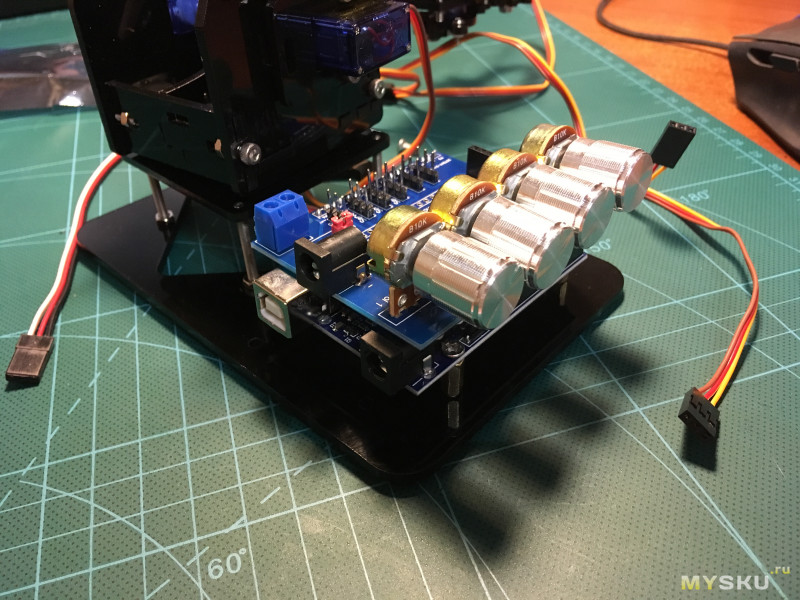
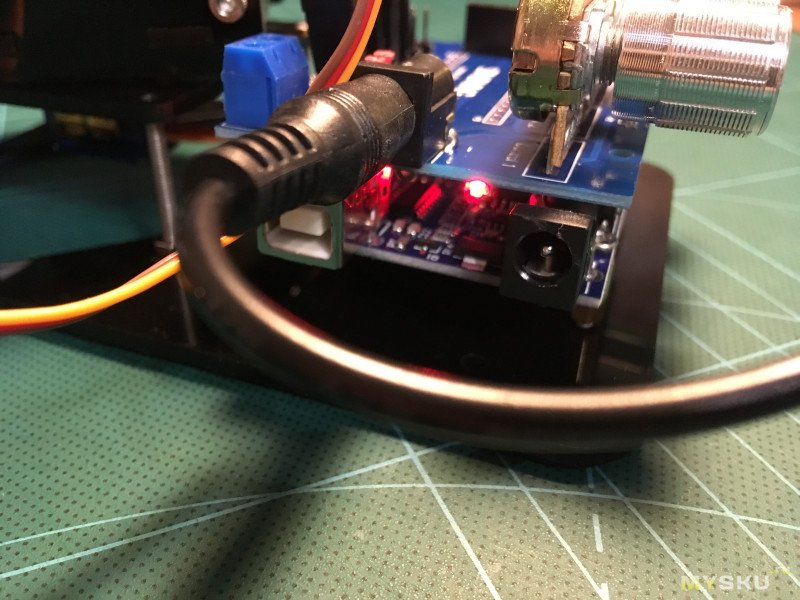
Вторая плата вставляется с помощью штыревых контактов в нижнюю:
Такой вот пирог:
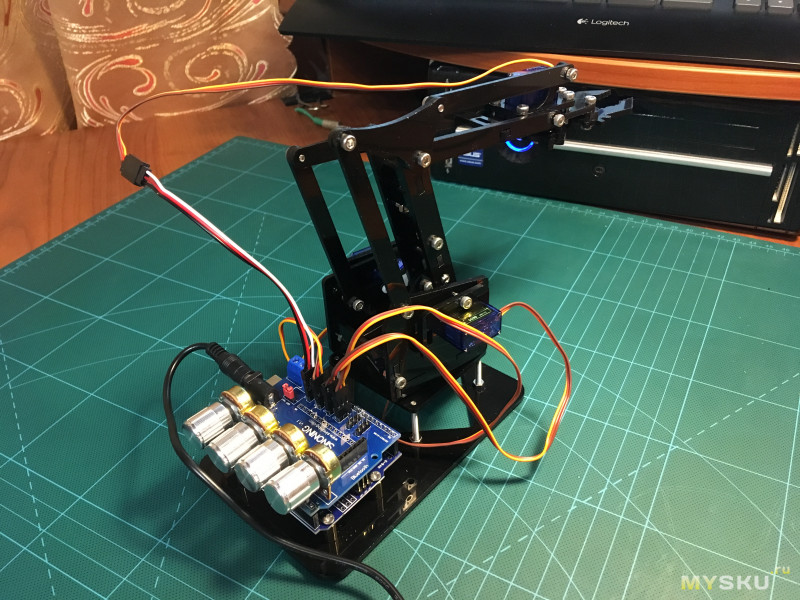
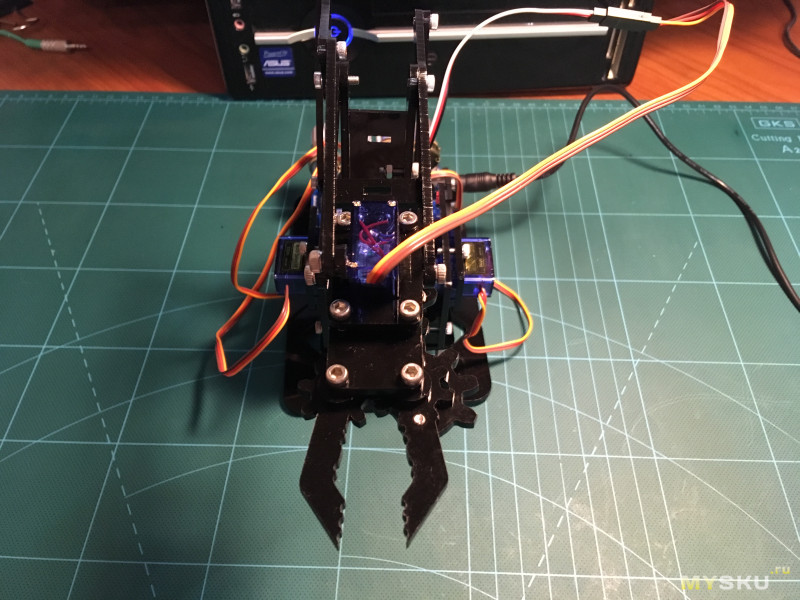
Готовый захват. Обратите внимание, что на верхней плате была установлена перемычка, она служит для питания платы Arduino UNO R3 через плату ручного управления от одного источника. Можно запитать платы отдельно, убрав перемычку.
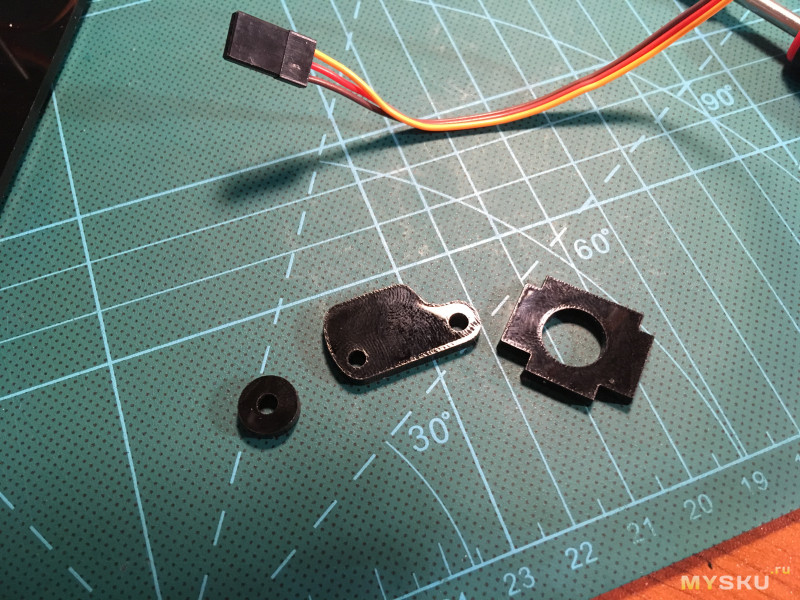
Провода от серводвигателей коротковаты, но нужды удлинить их нет кроме провода питания сервопривода захвата, на этот случай производитель положил в комплект адаптер-удлинитель, можно увидеть на фото:
Видео работы механизма:
Сервомоторы немного колбасит, то есть плавность не идеальная. Но я вычитал, что можно немного уменьшить величину питающего напряжения до 4,5-4,8 В, и тогда будет чуть плавнее.
Insum.
Конструктор мне понравился. На сборку и настройку я потратил около 3 часов. Так как детали изготовлены из акрила, стоит отнестись к процессу деликатно, дабы не поломать составные части.
Крепежа в комплекте достаточно, даже в избытке, остались винтики. Комплектация полная.
Родными ключами пользоваться мазохизм, поэтому приготовьте свой инструмент.
Конструкция не очень устойчиво стоит на столе, поэтому лучше ее закрепить на чем-то более массивном.
Чтобы расширить возможности устройства, можно использовать bluetooth модуль, джойстик. У меня в комплектации этого ничего нет, но на сайте производителя можно посмотреть вариации на эту тему.
ИМХО. Отличный набор для хобби, освоения так сказать матчасти, а также навыков в электронике у детей школьного возраста.
Товар предоставлен для написания обзора магазином. Обзор опубликован в соответствии с п.18 Правил сайта.
Планирую купить+20Добавить в избранноеОбзор понравился+35
+48
я насчитал 94 фотки. Если честно, мне бы хватило 5 штук, думаю остальные было бы лучше под кат «сборка».
Представляю что будет, если вам на обзор пришлют конструктор лего :-).
Не надо. С этого всё и начинается. Пару картинок спрятать, потом придурашные предыстории про то, как ещё прадед мечтал о такой замечательной ерунде, затем весь обзор бьётся на кучу спойлеров, а в итоге можно и cut не ставить.
Дальше надо математику править, дабы крутилка вперёд/назад двигала клешню не меняя высоту, а то и вовсе перейти в декартовы координаты по всем осям. И тогда начнёт приходить понимание, что робототехника это не так просто.
а варианты самосбора на стальных пластинах и шаговиках кто подсказать может? (чтобы раскрой заказать), а то акрил+сервы хлюпенько выходит, чуть поиграться, не более (подсказали www.youtube.com/watch?v=CCgI4R1TEzI но он слишком, там не плоские профили)
За обзор спасибо, интересно, да и цена адекватная.
«дребезг» серв устраняется командой отключения сервы после движения. на ютюбе есть замечательный канал, где дядечка изумительно рассказывает о ардуино-поделках

























Представляю что будет, если вам на обзор пришлют конструктор лего :-).
Постараюсь убрать часть под спойлер позже
m.banggood.com/Acrylic-Remote-Control-Robot-Arm-4DOF-With-Arduino-PS2-RC-Robot-Toys-p-1240623.html?rmmds=search
Кстати, если Евгений1(он же Гоша, он же...) вдруг заглянет, сегодня видел 6,3мм биты от Wera в размере Torx 1.
Рядом только Witte с Torx 4.
За обзор спасибо, интересно, да и цена адекватная.
aliexpress.com/item/DIY-Acrylic-robot-arm-robot-claw-arduino-kit-4DOF-toys-Mechanical-grab-Manipulator/32642698995.html думаю сыновьям заказать