Приветствую всех снова с небольшим обзором хоббийного сервопривода + лирическое отступление.
После обзора паяльника магазин (и не только он один) предложил сделать обзор еще чего-нибудь на выбор. Идей не было, но стечение обстоятельств помогло с выбором.
Итак, недавно поддавшись ностальгии, я с удовольствием пересмотрел замечательные фильмы моего детства — Короткое замыкание 1,2 (Short circuit). Фанатов данных фильмов хватает и по сей день. Основным персонажем является вот такой робот:
Причем, кино снималось без всякой компьютерной графики, робот управлялся с пультов и оператором через телеметрический экзоскелет. В моем детстве не было ни одного мальчика, который посмотрев кино, не хотел бы заполучить себе робота из фильма. И вот, после просмотра, мой внутренний ребенок начал канючить — ну давай, мужик, давай построим его, ну что тебе стоит. Мне, человеку, далекому от роботостроения, это стоить должно было дорого, но я поддался.
Сначала я собрал материалы по оригинальной конструкции робота (спасибо американскому сообществу фанатов — есть и фото разборки оригинала и попытка воссоздать его в твердотельной модели Solidworks):
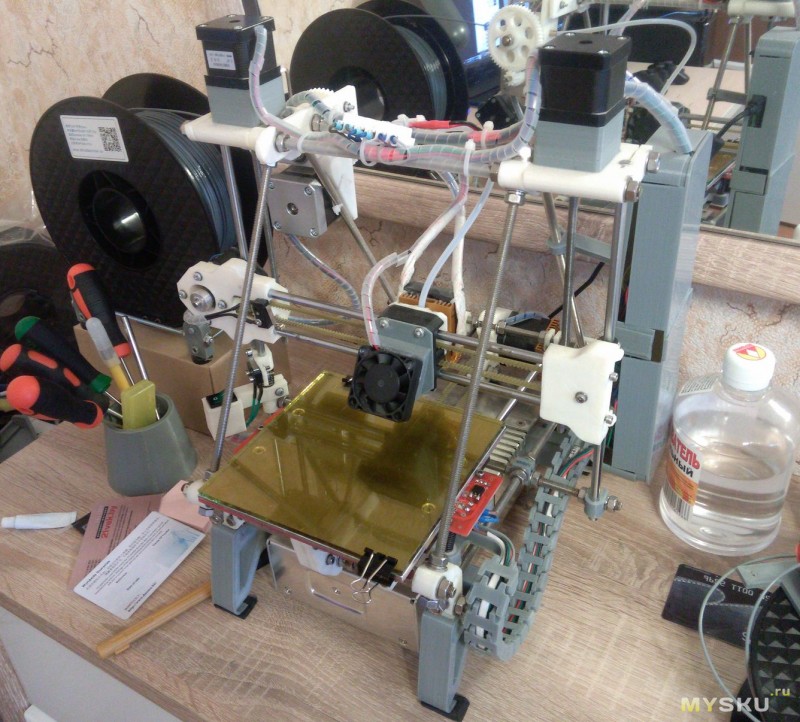
Потом определился со способом изготовления — я решил купить компактный 3d принтер. Точнее собрать из набора. Вот он, немного модифицированный мной:
Самого робота я проектировал в Solidworks и сразу печатал детали, тестируя в реале.
Начинка — Arduino Mega, драйверы моторов и серводвигателей, сервоприводы и LIPO-аккумуляторы, роутер TP-link, веб-камера, джойстик с приемником от PS2 и прочее.
До окончания постройки еще далеко и сама эпопея заслуживает отдельного рассказа и предметом обзора, естественно не является.
Но вот в одном моменте стройка и пересекается с героем обзора.
В кино робот умел становиться на цыпочки, вот так:
Ни одни из реплик, даже весьма серьезные, не повторяли этой возможности. Я решил попробовать, взяв за основу оригинальную кинематическую схему поворота траков. Оказалось, что ни один из стандартных сервоприводов не справляется — не хватает крутящего момента. И в этот момент я и подумал о нечто большем и мощном.
Поискав на полках магазина, я обнаружил такой сервопривод — CYS-S8218, со следующими характеристиками:
Specification:
Weight:164g
Size:60*28*54mm
Speed rate: 0.20--0.22sec/60°at (6V)
0.18--0.2sec/60°at(7.2V)
Torque: 38--40kg.cm.at (6V)
40--42kg.cm.at (7.2V)
Решив, что такой сервопривод вполне себе может подойти — сделал заказ.
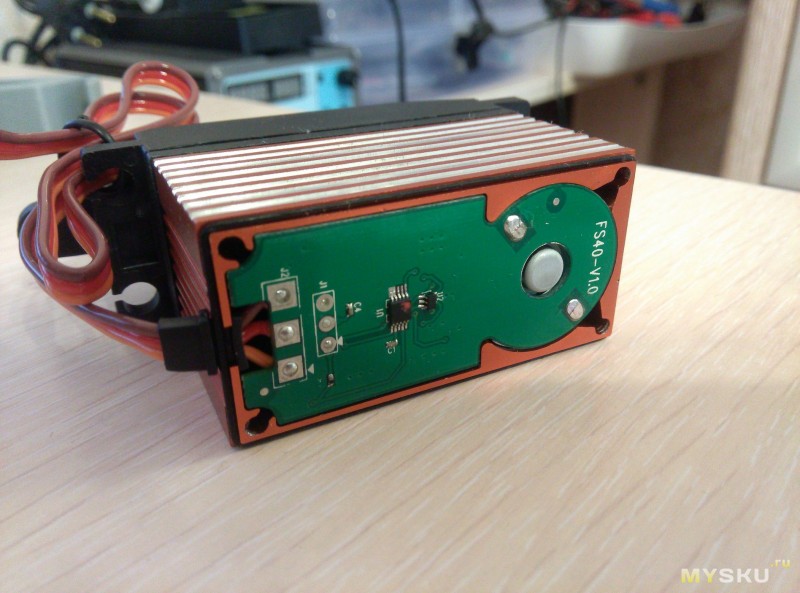
Через две недели сервопривод был уже у меня. Упакован был в полиэтиленовый пакет, вместе с пакетиком качалок и крепежа. Вот он, красавец:
Найдя на сайте производителя описание — обнаружил, что магазин немного приврал:
Stall Torque (6.0V) — 36kg.cm
Stall Torque (7.4V) — 38kg.cm
при этом
Stall Current — 7.5A/8.6A
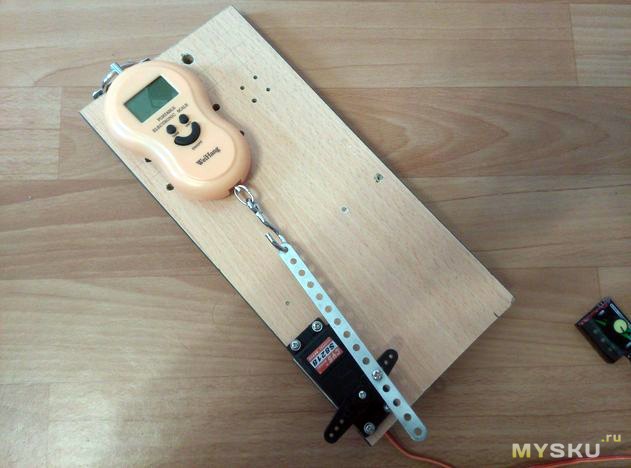
Прежде чем смонтировать сервопривод, решил посмотреть, какой момент он выдает в реале. Отдаю себе отчет, что конструкция так себе, но задачу свою выполняет:
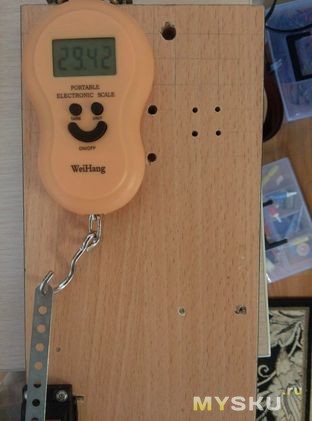
Тестировал с БП Gophert CPS-3205. Показания весов приводятся на момент срабатывания защиты БП при токе в 5А.
6v -
7.2v —
Таким образом видим, что показатели приближаются к заявленным и если бы не защита БП — возможно они были бы достигнуты. Печалька, но при подключении к LIPO 11v 2800mah 35C, через UBEC 8A 6v — получить более вкусные результаты не получилось- сработала защита UBEC.
Будем считать, что сервопривод ожидания почти оправдал.
Смонтировав его, я выяснил, что он работает, но не сказал бы, что с запасом. К сожалению, не хватает знаний, что бы расчитать какой оптимальный крутящий момент нужен для моей конструкции — но я поработаю над этим.
Вот видео шасси со снятыми гусеницами. В реале траки будут помогать повороту гусеницами за счет включения двигателей.
Товар предоставлен для написания обзора магазином. Обзор опубликован в соответствии с п.18 Правил сайта.
Планирую купить+17Добавить в избранноеОбзор понравился+56
+116
Сидит девушка за компьютером и плачет. Подходит коллега, видит надпись на мониторе: «Невозможно выполнить вход в систему. Обратитесь к системному администратору.» Спрашивает:
— Ты чего плачешь-то?
— А я и есть системный администратор!
:)
Есть такое. Часто вижу в качестве советов по ремонту чего-либо: обращайтесь в специализированный сервис по ремонту.
Но я и есть специализированный сервис.
Вот так, взять и сделать робота!
Сначала подумал: «чувак псих»
Потом почитал и понял, что все намного серьезнее :)
Молодец! Есть в России люди, которые МОГУТ и ДЕЛАЮТ! Это радует.
Сразу возникает вопрос, почему именно сервопривод, а не шаговик с редуктором? Например, от CNC станков. Развиваемый крутящий момент будет гораздо выше, улучшается точность, появляется регулировка скорости, и ускорения.
Поигравшись немного с сервами на ардуинах, пришёл к выводу что шаговики по всем параметрам лучше. Хоть они и более сложны в управлении.
Тоже думал про этот вариант. Но, во первых, редуктор толком некуда впихнуть (примерялся и так и эдак), чтобы не нарушать аутентичный вид робота и работу другой механики, во вторых шаговиков подходящих ТТХ не нашел, в третьих — удобнее управлять всеми сервами с одного I2C многоканального контроллера.
у шаговых моторов момент меньше. Хотя про управляемость верно.
Для такого же усилия шаговый мотор должен быть в 2 раза больше. У автора с этой сервой все работает отлично, зачем что-л. менять?
В шаговиках ОООчень большая проблема в том, что если они пропускают шаг (под нагрузкой) это ни где не учтиывается, таким образом если будет пропущенно много шагов, то то что крутит шаговик приедет не в заданную точку. А вот если использовать двигатель постоянного тока и сервопривод постоянного тока как например то там будет и колоссальный момент, и статическая ошибка равна нулю.





хобби улётное, респект :)
«Стефани сменила окраску?», эх детство)))
Вот это современное хобби! ))
— Ты чего плачешь-то?
— А я и есть системный администратор!
:)
Но я и есть специализированный сервис.
Или скриншот разработки?))
Вот, например — yadi.sk/i/DnRsfPAujpDHU
Померял -12 mA. Это даже меньше, чем в мануале.
Сначала подумал: «чувак псих»
Потом почитал и понял, что все намного серьезнее :)
Молодец! Есть в России люди, которые МОГУТ и ДЕЛАЮТ! Это радует.
Поигравшись немного с сервами на ардуинах, пришёл к выводу что шаговики по всем параметрам лучше. Хоть они и более сложны в управлении.
Для такого же усилия шаговый мотор должен быть в 2 раза больше. У автора с этой сервой все работает отлично, зачем что-л. менять?