Добрый день!
Сегодня постараюсь изложить подробно сборку БПЛА.
Посылки приходили мне в течении длительного времени, с большим разбросом.
Я делал все по наличию) вам советую по порядку. Часть 1
Вступление:
Желание построить коптер появилось после этого видео.
Дни напролёт я тратил на изучение тематики.Твердо решил собирать самостоятельно.Днями в голове циркулировали мысли о постройке и подборе компонентов: вариации, сравнение цен, фирмы производители, необходимые компоненты и прочее. Определился с компонентами, сделал заказ. Наступили долгие и скучные дни ожидания.
Это время я практично потратил на изучении информации о контроллере и его настройке ( NAZA )
Прекрасную информацию нашел на сайте flydrones.ru/faq-naza/
( информационный ресурс, полезный новичкам, не реклама)
Аппаратура
Начинать я рекомендую с настройки аппаратуры( с последующей коррекцией после сборки), во избежание возможности взлета без настроек( есть пара случаев на памяти, итог которых паника и материальные потери)
Так выглядит в коробке
Само устройство Устройство аппаратуры в двух словах:
Непосредственно сам пульт
Передатчик(JR модуль)
Приёмник
Навигация
Начальные знания:
*при включении вылетела ошибка или кракозябры. Как лечить: все тумблеры нужно перевести в положение от себя.
*как войти в меню?
Зажмите кнопку MENU.
* как включить самолётный режим?
Войдите в меню, SYSTEM SETTING,TYPE SELETCT,ACRO.Для подтверждения нажмите кнопку меню. ( Хорошо, теперь выбран режим самолёта) Для справки: это режим работы аппаратуры, нужно выбирать его для нашего квадрокоптера.
* в разделе SYSTEM SETTING нужно выбрать STICK SET. Mode 2
Расшифровываю:
1 канал A- элероны
2 канал Е- элеватор
3й канал Т- газ
4й канал R- рудор( поворот по оси)
5-6 канал программируемые.
При выборе mode2 аппаратура вам предложить сделать реверс газа отказывайтесь, нажав EXIT.
Теперь нужно зайти в раздел FUNC SETTING.
Вам нужны будут следующие разделы:
E.POINT( на первой странице 1-2 столбцы)
AUX CH ( на второй странице 3-4 стобцы )
PROG.MIX ( на второй странице 3-4 стобцы )
Первоначально нужно зайти в AUX CH
* на 5й канал( Ch5 ) нужно установить GEAR ( двухпозиционник)
Следующий этап это настройка миксов( будут ниже)
И финально коррекция в E.POINT. (для переходов между конечными точками, щелкайте нужный тумблер, значение перескочит)
Теперь самое важное Настройки аппы (Не мои,все права соблюдены)
Для стоковой прошивки
Я миксом сделал трехпозиционник и gear (в самолетном режиме!!!!), миксуем на gear три режима в «prog.mix», а gear на 5 канал вешаем (в aux-ch ), а 6 оставляем пустым, и вуаля, имеем двухпозиционник на 5 канале (gear) и трехпозиционник на 6 канале (U).
mix1:
state act
master gyr
slave flp
offset 000
uprate -100
dnrate 100
sw nor
Чтоб «посинели» «М» и «ЖПС» подогнал E.Point на 6ом канале (FLP) до 092% и 067%
Центр только не попадал в «А»
Подогнал в «mix2″ «dnrate» до «-013″. Посинела «А».
Автор:devv aka Евгений Дегтянников В скобках моя коррекция под мой экземпляр. От себя:
Реверс FLP ( трехпозиционный )
Коррекция в Е.Поинт
ФЛП по 96%
Гир 12% и 0%
Коррекцию в Е.Поинт и Микс( айрэйт и днрэйт) делайте под себя.
Перейдем к сборке. Совет: не собирайте раму сразу полностью, не монтируйте верхнюю пластину.
Необходимые детали на данном этапе.
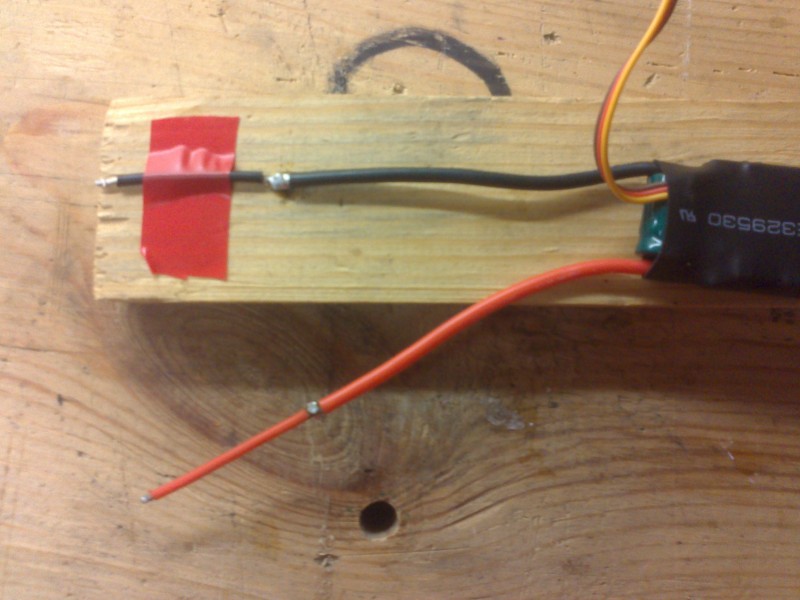
Вот так выглядит мотор и регулятор
Примерьте все на раму. Мне не хватило длины проводов от платы разводки питания до регуляторов.Пришлось удлинить
Использовал провод 14awg. Их сечения достаточно для проведения 20а.
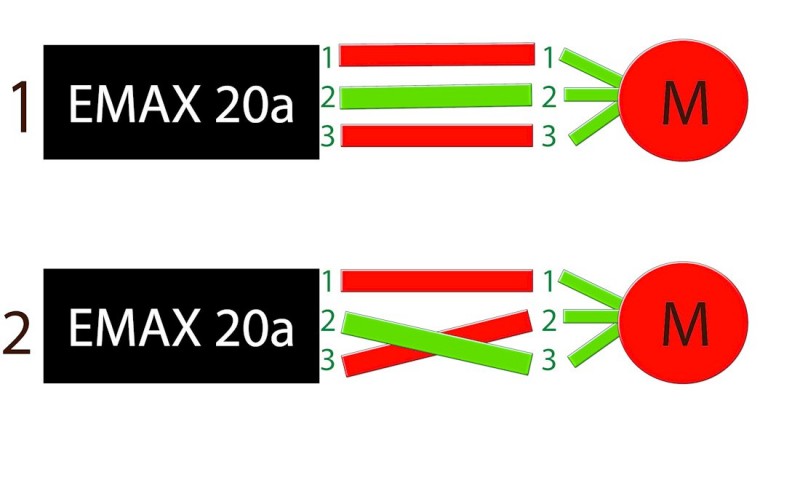
В Квадрокоптере используются две пары моторов с взаимообратным вращением. Чтобы получить их нужно подключить моторы к регуляторам в следующей последовательности:
Используя такую схему вы получите две пары взаимообратно вращающихся мотора.
Следующим этапом проведите калибровку регуляторов( ESC )
Выполняется следующим образом. Пропеллеры не устанавливать. снять если установили)
1) Включить аппаратуру, переместить стик газа( левый) в верхнее положение.
2) Сигнальный провод регулятора воткнуть в 3й канал приёмника( для регуляторов с пометкой OPTO использовать убек.)
3) Подать питание на регулятор, подождать 1-3 сек и опустить речку газа вниз.
4) Подождать, регулятор пропищит. Поднять немного газ вверх, для проверки, потом должен запуститься. ( запомнить направление вращения, полный газ не давать)
5) Повторить с оставшимися связками.
Я припаял регуляторы к плате разводки питания, теперь можно выполнять монтаж на раму регуляторов и моторов.
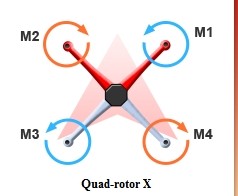
Схема расположения моторов.
Теперь подключим приёмник к NAZA M LITE
Получится вот так:
Немного объяснений:
Naza имеет собственный конвертор питания, который будет подключаться к плате разводки питания.
От назы будет питаться приёмник, прошу не эксперементировать с питанием!
Или искать источник 5v.
Расскажу про режимы полета: GPS — когда не трогаете пульт, висит в точке. АТТI — удерживает высоту. Manual — Нужен в экстренных ситуациях, когда коптер странно себя ведет( неполадки в ЖПС модуле или магнитометре)
Предсказываю комменты профи: для новичка мануал в других случаях не нужен.
Не расстраивайтесь, если коптер взлетает только на 50% газа — это фишка наза.
Более подробно вы можете узнать тут( не пренебрегайте инструкцией)
Для тех кто не заметил, такой БПЛА может убить человека при неправильной эксплуатации.
Пропеллеры в пике делают около200 оборотов в секунду(для моторов 980 оборот на вольт, при 3s батареи(12в), это мини газонокосилка. Пальцы срежет легко.
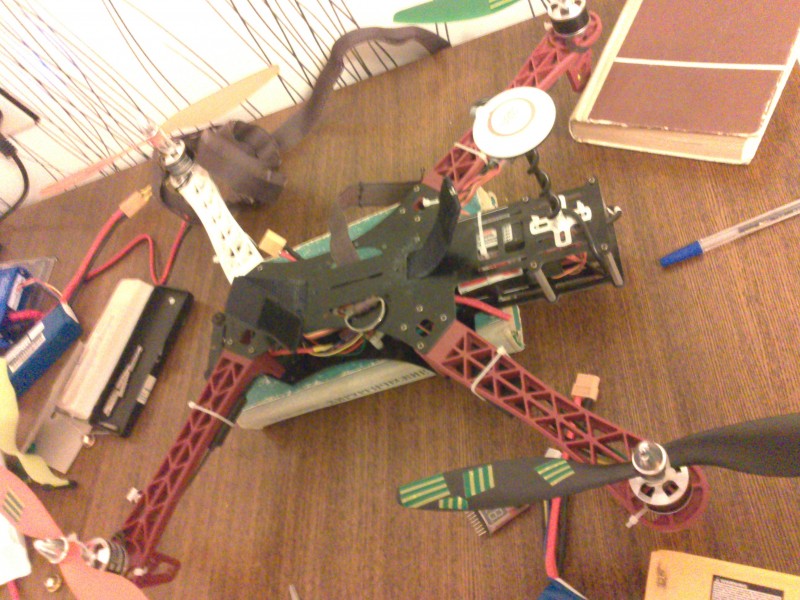
Готовый результат
Использую аккум 4400 3s2p — время полета без навесного оборудования 18 мин.
Своими руками собрал примитивную подсветку из диодов 5мм и старого фонаря, питание от 1s.
LED панель от фонарика установил курсовой фарой.
Получилось так
ФОТО
Со временем изменил подсветку, использовал LED ленту, питание 12в
Фото с подвесом
НЕ РЕКЛАМА!!!
Продолжение будет!
Балансировка пропеллеров *в разработке*
Установка БК подвеса *в разработке*
Прошивка Naza M Lite в более дорогую Naza M v2. *в разработке*
Планирую купить+48Добавить в избранноеОбзор понравился+40
+76
Если будет с режиме GPS висеть в точке — ничего.
Если куда-то лететь и пропадет связь, то вернется к точке потери сигнала. Если его не находит включается процедура полёта домой с приземлением.
Вы это проверяли? У этих приемников забавное поведение при потере связи — на части каналов пропадает ppm а на каких то остается принимая не то среднее не то крайнее значение — уже не помню, давно не летаю с родными радиомодулями.
Я поясню свою мысль. Самое важное в радиоуправляемой модели (не игрушке) это надежное радиоуправление. У меня есть богатый опыт доставания моделей с деревьев и вылавливания их из реки и я знаю о чем говорю :) Летающая мясорубка весом 1,5 килограмма не умеющая планировать, которая решила висеть там, где не предполагалось, пока не кончатся батарейки — это не шутки.
Вообще, нет смысла дискутировать на тему коптерных конфигураций. Тут каждый сам решает что ему нужно и что он сделает сам. Кто то купит готовый фантом, а кто то построит коптер на вертолетных гироскопах.
В вашем случае я вижу, что вы купили довольно дорогой полетный контроллер, который в некотором роде задает определенный уровень всему проекту. Я не призываю вас пойти выкинуть турнигу (извиняюсь флайскай) и купить футабу. Я предлагаю заменить радиомодуль и приемник. Вы получите большую дальность, более надежный протокол связи, диверсити на приемнике радиоуправления, если захотите то телеметрию и конечно полноценный фэйлсэйф.
Я сравниваю вч модуль и полетный контроллер в отношении затрат на проект.
Мой коптер при потери связи летит домой. Если висит в точке, могу спокойно выключить аппу и не опасаясь за случайные нажатия сменить свое местоположение или ответить на звонок. В людных местах не летаю. При определенном уровне вольт сам садится.
Очень хорошо. В вашем случае все нормально. Правда если потеря связи произойдет над озером в безлюдном месте, нужно будет время, чтобы найти лодку для смены местоположения, причем время поиска ограничено емкостью батарей :) Я своими глазами видел, что коптеры не умеют плавать :)
Я поясню что такое фэйлсэйф для тех, кто будет читать вашу инструкцию и строить свой летательный аппарат. Это свойство аппаратуры радиоуправления. При его отсутствии можно его добавить заменой вч радиомодуля, который это умеет (и приемника радиоуправления, работающего в паре с этим радиомодулем). Работает это так: при потере связи приемник на своих выходах выставляет сигналы на всех каналах так, как это предварительно настроено. Например если есть кнопка «коптер прилетай домой» то приемник при потере связи с пультом радиоуправления сам ее нажмет и коптер полетит к точке взлета в любом случае.
Я не рекламирую компанию фрискай. Я просто не знаю более дешевого (и простого, работающего из коробки) способа добавить этот функционал к вашей аппаратуре радиоуправления (что соответствует духу проекта — разумная экономия на всем + покупка полетного контроллера, который не сложно заставить летать). Сам я не летаю с управлением на частоте 2,4 но покупать Open LRS (orange open lrs) не советую, т.к. из коробки она нормально не работает и процесс ее настройки сложен для начинающих, хотя конечно она дает возможность получить гораздо большую дальность радиоуправления за сравнимые деньги.
Спасибо, но вы меня не поняли. ФС в самой назе, мне этого достаточно. Алгоритмы возвращают коптер домой.
Расписываю все по пунктам:
1) Если коптер в режиме удержании позиции, выкл аппу- ничего не произойдет.( все разумно) Будет висеть в точке.
2) Коптер летел и потерял связь. По инерции пролетит 1-5 метров, в зависимости он первоначальной скорости. Начнет возвращаться в ту точку, в которой пропала связь. Если ловит сигнал, все ок.
Если же сигнала нет, то мозг включает ФС и летит в точку взлёта.
Фрискай хорош, но пока у меня цели не в установке рекордов дальнобойности)
Дополнительно ограничен радиус полёта в назе до 700м ( аппа это расстояние точно возьмёт)
Даже если получится улёт, коптер упрётся в невидимую стену на расстоянии 700м от точки взлета.
Я вас понял и не считаю алгоритм правильным. Считаю фс необходимостью, элементом безопасности. Потеря связи на самолете с автопилотом — автовозврат в любом случае. То же самое для коптера с гпс -потеря связи — тут же набираем безопасную высоту и летим домой.
Летающее крыло фпв по фс у меня настроено на плоский штопор. Самолеты обычно выключают мотор и планируют по кругу.
Думаю вы путаете режим полета GPS и режим удержания позиции.
У меня не самолёт, а коптер)
Крыло в планах, как и обновление на фрскай. Для моих задач дальнобойности аппы хватит)
Если бы я рассматривал в данном обзоре фпв самолёт дальнолёт+ стоковый флайскай, то это было бы ошибкой.
Если вы не имеете контроля над радиоуправляемой моделью, то такая ситуация на мой взгляд является аварийной.
Опять же, исключительно по моему мнению, с аварийной ситуацией надо срочно что то делать — постараться ее прекратить.
Я не могу посоветовать что то на 433 Мгц для назы. Я в принципе могу посоветовать летать FPV с LRS на всем кроме мини квадов.
Сам я летаю на LRS Rmilec с приемниками orange open lrs со специальной прошивкой, т.к. у меня просто есть это передающий модуль и меня все устраивает. Самое бюджетное LRS это orange open lrs (и приемник и передатчик). Но много возни с прошивкой и настройкой. Вот ссылка на один из лучших проектов под это железо для понимания github.com/baychi/OpenExpertTX/wiki
Тем кто хочет купить хорошую LRS недорого, но не хочет много возни я посоветовал бы LRS Rlink.
433 это не пульт. это дополнение к пульту. и «проливать подгонять» это если хочется:
1) подешевле
2) с кастомным функционалом
например я проливаю и подгоняю, но имею приемники на 433 ценой всего (примерно) по 20$ за приемник, одновременно с выходами все 8 каналов, ppm, rssi. кроме того при длительной потере связи мой приемник становится радиомаяком для поиска модели.
Rlink LRS (комплект из передатчика и приемника) стоит около 150$ при цене приемника отдельно около 40$ (сравните с ценой приемников от других коммерческих LRS) и не требует никакой прошивки-перешивки, т.е. работает из коробки.
Естественно эти 150$ — это дополнительно к пульту.
Начинающие — они бывают разные. Например прицелившиеся на далекие полеты и с деньгами :)
Если уж более точно, то файлсейв- свойства конкретного приемника радиоаппаратуры.
И да, я двумя руками за замену ВЧ модуля в аппе FlySky на что-то более хорошее, или Spektrum DM9 или FrSky DGT.
А так же за перепрошивку передатчика на er9x.
Почти согласен.
Мне достаточно программного Фс в назе.
За замену я тоже, вопрос в деньгах
А насчет перепрошивки спорный момент. Мне она кажется ущербной. В стоке все более просто и понятно.
Ужасные фото, но за обзор несомненно плюс ))) Спасибо! Тематика интересует =)
А почему именно Наза? Есть же варианты подешевле, да и апгрейдить потом дешевле в разы, не? АПМ например )))
Вместе сидим в RC скул моделс)))
Апгрейд для назы есть, мне он не нужен)
Есть мысли перейти на АМП ))
Насчет фото, согласен. Фоткал с ущербного телефона. Думаю будет скоро нормальный.
Так то да ))) Но дело в том, что Юлиан то расхваливает АПМ 2.6 ))) Из его видео я понял, что куплю именно этот полётный контроллер. Кстати, моё решение строить собственного коптера было принято именно при просмотре того самого видео Игоря Рубина, про TBS Discovery )))
Единственное в пользу назы — летает из коробки, ну и надёжность, бренд как ни как. Ну а в минусах — цена ))) Хотя наза лайт стоит 150, а оригинальный (не копия) АПМ стоит сотку. Не такая уж и большая разница.
Но я не вижу особой сложности в настройках ардуиновых контроллерах для новичков, в наше то время ))) Мануалов в сети — тонны ) Даже своя вики по ардупилоту есть, на русском )))
Эммм. вопрос по аппе.
9 каналов. 4 — понятно. 5- подсветка, допустим. (Кстати, подсветка запитана от того же аккума?) 6, 7, 8, 9 — для чего?
Если я не буду заморачиваться ГПС и т.п., а только ради полетов с ФПВ, и иногда с подвесной камерой для съемок, может стоит взять шестиканалку?
Flysky FS-T6, или FS-i6. Все же хоть сколько, но все равно дешевле.
Купите аппаратуру как у автора обзора. Вы не пожалеете. У нее огромный потенциал при низкой цене.
Фпв самолет:
элероны, руль направления, руль высоты, закрылки, газ — 5 каналов. переключение полетного режима — 6й канал. переключение полетного экрана — 7й канал. шасси 8й канал. пан и тильт для курсовой камеры — 9 и 10 канал. это к примеру.
Два канала для управления подвесом.(пантилт) Именно для NAZA интеллектуальная ориентация. Уже три, итого 8. Или добавить управление подсветкой с аппаратуры. По факту мало 6. Но можно уложиться. Флайскай 6 каналов сложнее улучшить, чем 9ку.
Дело не в том, что для самолета. Если самолет летающее крыло или без элеронов хватит по минимуму и 3 каналов. Дело в том, что обычно пульт покупается один а моделей много. Поэтому не надо совсем уж сильно экономить на пульте.
Можно обойтись 6 каналами, но не нужно.
Дешевые шестиканальные передатчики — реальная гадость, я уж писал как-то.
Лишние 25 баков на девятиканалку — стоящая трата.
Мне известна вполне приличная шестиканалка, клон Спектрума DX6i, но стоит она немного, но подороже девятиканалки от FlySky|Turnigy|Avionix
Выбор рамы 250, 330, 450, 550 осуществляется из каких соображений? Только размеры полученного в итоге аппарата?
Контроллер без ЖэПэса какой посоветуете?
Все зависит от задач, для которых строится аппарат.
250ка это для фпв гонок. Быстрый шустрый. На таком устанавливают простейший мозг( думаю в скором времени он у меня появится)
330 это между 250 и 450.
450 для полета с gopro и бк подвесом. Естественно фпв, но уже медленней.
550 это долголеты, на 6S и с тяговитыми моторами с большими пропами, дорогие.
Или гексакоптер на раме 550.
Есть мультироторы и 750 и больше. Дорогие аппараты, чтобы таскать зеркалки.
Калибровка регуляторов поотдельности, на мой взгляд неправильно.
Я бы соединил вместе сигнальные провода всех регуляторов и подсоединил бы их к каналу газа приемника. После этого джойстик вверх при включении — пикнуло — джойстик вниз.
У дешевой и не только дешевой аппаратуры «плавает» немного начальные и оконечные позиции джойстиков и зависят, например от силы нажатия пальцем на джойстик.
Калибровка вместе сделает все регуляторы полностью синхронными.
Сам скорее по самолетам, и в многомоторной модели тоже делаем именно так.
Читал как-то ветку форума коптерщиков — это достаточно частая причина нестабильного висения.
Ставить назу и пластиковые пропы это как-то не по феншую. На гексе ещё можно, в случае отрыва одного остальные может и вытянут, а на квадре этож дрова однозначно!
А магнитный балансир я собрал из металла из леруа мерлен + два магнитика на шляпки винтов, зажим-балансир для винтов из хобби магазина. Винтами можно регулировать расстояние от магнита до оси балансира.
как заказывать моторы если две пары моторов с взаимообратным вращением их что можно сделать из обычных а как быть с креплением пропеллеров ???? обьясните пожалуйста новичку!!!
Если мотор с резьбой и есть варианты CW u CCW, лучше их. Там резьба нарезана так, что при вращении мотора гайка сама затягивается. Есть обычные. Мои вообще цанговые. Приходится пропеллер крепить на всякий случай стяжкой(сэкономил). Лучше санскай, ссылка есть в тексте.
Скажите пожалуйста, а есть ли недорогие складные рамы такого тип-размера? Нашёл пару вариантов, но или площадка маленькая под оборудование, или цена заоблачная…
Добрый день!
Спасибо за ваши обзоры — очень познавательно!
Если рассматривать квад для съемки на ГоПро 3 (как по работе так и для красивых кадров с путешествий) лучше начать собирать самому, например по вашему рецепту или выбрать готовый фантом 2 с подвесом H3-3D?
Лучше выбрать фантом 1 Б/У с гоупро3 и подвесом если для работы и красивых кадров и если это не предполагает очень большую дальность и высоту, много денег не потребуется по сравнению с последними фантомами )) Мне эту мечту обломал кризис)) Щас уже думаю может и хорошо, т.к. это довольно дорогостоящее хобби постоянно че-то улучшать (хотя какое хобби бесплатно бвыает, везде бабло требуется)))
Шикарный обзор, жду продолжения.
Загорелся тоже заняться моделированием, чувствую по душе мне это будет. ))
Есть маленький вопрос. Т.к. я начинающий или даже сказать нулевой пилот. Какой коппер взять для учебы(из недорогих) но чтоб был совместим с рекомендованной вами аппаратурой FS-TH9XB. Так сказать буду начинать собирать с аппаратуры, зарядка ну т.д. и двигаться в сторону примерно как у вас в обзоре.




















Грубо сам кило и может столько же взять.
Если куда-то лететь и пропадет связь, то вернется к точке потери сигнала. Если его не находит включается процедура полёта домой с приземлением.
Т.е. при потере связи может и не прилететь домой?
например это www.hobbyking.com/hobbyking/store/__14349__FrSky_DJT_2_4Ghz_Combo_Pack_for_JR_w_Telemetry_Module_V8FR_II_RX.html просто копейки в сравнении со стоимостью назы.
А в каком отношении вы сравниваете Контроллер полёта и ВЧ модуль?
Я поясню свою мысль. Самое важное в радиоуправляемой модели (не игрушке) это надежное радиоуправление. У меня есть богатый опыт доставания моделей с деревьев и вылавливания их из реки и я знаю о чем говорю :) Летающая мясорубка весом 1,5 килограмма не умеющая планировать, которая решила висеть там, где не предполагалось, пока не кончатся батарейки — это не шутки.
Вообще, нет смысла дискутировать на тему коптерных конфигураций. Тут каждый сам решает что ему нужно и что он сделает сам. Кто то купит готовый фантом, а кто то построит коптер на вертолетных гироскопах.
В вашем случае я вижу, что вы купили довольно дорогой полетный контроллер, который в некотором роде задает определенный уровень всему проекту. Я не призываю вас пойти выкинуть турнигу (извиняюсь флайскай) и купить футабу. Я предлагаю заменить радиомодуль и приемник. Вы получите большую дальность, более надежный протокол связи, диверсити на приемнике радиоуправления, если захотите то телеметрию и конечно полноценный фэйлсэйф.
Я сравниваю вч модуль и полетный контроллер в отношении затрат на проект.
Я поясню что такое фэйлсэйф для тех, кто будет читать вашу инструкцию и строить свой летательный аппарат. Это свойство аппаратуры радиоуправления. При его отсутствии можно его добавить заменой вч радиомодуля, который это умеет (и приемника радиоуправления, работающего в паре с этим радиомодулем). Работает это так: при потере связи приемник на своих выходах выставляет сигналы на всех каналах так, как это предварительно настроено. Например если есть кнопка «коптер прилетай домой» то приемник при потере связи с пультом радиоуправления сам ее нажмет и коптер полетит к точке взлета в любом случае.
Я не рекламирую компанию фрискай. Я просто не знаю более дешевого (и простого, работающего из коробки) способа добавить этот функционал к вашей аппаратуре радиоуправления (что соответствует духу проекта — разумная экономия на всем + покупка полетного контроллера, который не сложно заставить летать). Сам я не летаю с управлением на частоте 2,4 но покупать Open LRS (orange open lrs) не советую, т.к. из коробки она нормально не работает и процесс ее настройки сложен для начинающих, хотя конечно она дает возможность получить гораздо большую дальность радиоуправления за сравнимые деньги.
Расписываю все по пунктам:
1) Если коптер в режиме удержании позиции, выкл аппу- ничего не произойдет.( все разумно) Будет висеть в точке.
2) Коптер летел и потерял связь. По инерции пролетит 1-5 метров, в зависимости он первоначальной скорости. Начнет возвращаться в ту точку, в которой пропала связь. Если ловит сигнал, все ок.
Если же сигнала нет, то мозг включает ФС и летит в точку взлёта.
Фрискай хорош, но пока у меня цели не в установке рекордов дальнобойности)
Дополнительно ограничен радиус полёта в назе до 700м ( аппа это расстояние точно возьмёт)
Даже если получится улёт, коптер упрётся в невидимую стену на расстоянии 700м от точки взлета.
Летающее крыло фпв по фс у меня настроено на плоский штопор. Самолеты обычно выключают мотор и планируют по кругу.
У меня не самолёт, а коптер)
Крыло в планах, как и обновление на фрскай. Для моих задач дальнобойности аппы хватит)
Если бы я рассматривал в данном обзоре фпв самолёт дальнолёт+ стоковый флайскай, то это было бы ошибкой.
Опять же, исключительно по моему мнению, с аварийной ситуацией надо срочно что то делать — постараться ее прекратить.
Бюджетный это оранж, 433 не подходит для новичка)
А так. да любой можно.
Сам я летаю на LRS Rmilec с приемниками orange open lrs со специальной прошивкой, т.к. у меня просто есть это передающий модуль и меня все устраивает. Самое бюджетное LRS это orange open lrs (и приемник и передатчик). Но много возни с прошивкой и настройкой. Вот ссылка на один из лучших проектов под это железо для понимания github.com/baychi/OpenExpertTX/wiki
Тем кто хочет купить хорошую LRS недорого, но не хочет много возни я посоветовал бы LRS Rlink.
1) подешевле
2) с кастомным функционалом
например я проливаю и подгоняю, но имею приемники на 433 ценой всего (примерно) по 20$ за приемник, одновременно с выходами все 8 каналов, ppm, rssi. кроме того при длительной потере связи мой приемник становится радиомаяком для поиска модели.
Rlink LRS (комплект из передатчика и приемника) стоит около 150$ при цене приемника отдельно около 40$ (сравните с ценой приемников от других коммерческих LRS) и не требует никакой прошивки-перешивки, т.е. работает из коробки.
Естественно эти 150$ — это дополнительно к пульту.
Начинающие — они бывают разные. Например прицелившиеся на далекие полеты и с деньгами :)
Но пока дальнолетов нет планах, возьму на заметку)
И да, я двумя руками за замену ВЧ модуля в аппе FlySky на что-то более хорошее, или Spektrum DM9 или FrSky DGT.
А так же за перепрошивку передатчика на er9x.
Мне достаточно программного Фс в назе.
За замену я тоже, вопрос в деньгах
А насчет перепрошивки спорный момент. Мне она кажется ущербной. В стоке все более просто и понятно.
Рама 500*500
А почему именно Наза? Есть же варианты подешевле, да и апгрейдить потом дешевле в разы, не? АПМ например )))
Апгрейд для назы есть, мне он не нужен)
Есть мысли перейти на АМП ))
Насчет фото, согласен. Фоткал с ущербного телефона. Думаю будет скоро нормальный.
Но я не вижу особой сложности в настройках ардуиновых контроллерах для новичков, в наше то время ))) Мануалов в сети — тонны ) Даже своя вики по ардупилоту есть, на русском )))
Знающий и АПМ быстро настроит.
9 каналов. 4 — понятно. 5- подсветка, допустим. (Кстати, подсветка запитана от того же аккума?) 6, 7, 8, 9 — для чего?
Если я не буду заморачиваться ГПС и т.п., а только ради полетов с ФПВ, и иногда с подвесной камерой для съемок, может стоит взять шестиканалку?
Flysky FS-T6, или FS-i6. Все же хоть сколько, но все равно дешевле.
Фпв самолет:
элероны, руль направления, руль высоты, закрылки, газ — 5 каналов. переключение полетного режима — 6й канал. переключение полетного экрана — 7й канал. шасси 8й канал. пан и тильт для курсовой камеры — 9 и 10 канал. это к примеру.
Дешевые шестиканальные передатчики — реальная гадость, я уж писал как-то.
Лишние 25 баков на девятиканалку — стоящая трата.
Мне известна вполне приличная шестиканалка, клон Спектрума DX6i, но стоит она немного, но подороже девятиканалки от FlySky|Turnigy|Avionix
Контроллер без ЖэПэса какой посоветуете?
250ка это для фпв гонок. Быстрый шустрый. На таком устанавливают простейший мозг( думаю в скором времени он у меня появится)
330 это между 250 и 450.
450 для полета с gopro и бк подвесом. Естественно фпв, но уже медленней.
550 это долголеты, на 6S и с тяговитыми моторами с большими пропами, дорогие.
Или гексакоптер на раме 550.
Есть мультироторы и 750 и больше. Дорогие аппараты, чтобы таскать зеркалки.
Я бы соединил вместе сигнальные провода всех регуляторов и подсоединил бы их к каналу газа приемника. После этого джойстик вверх при включении — пикнуло — джойстик вниз.
У дешевой и не только дешевой аппаратуры «плавает» немного начальные и оконечные позиции джойстиков и зависят, например от силы нажатия пальцем на джойстик.
Калибровка вместе сделает все регуляторы полностью синхронными.
Сам скорее по самолетам, и в многомоторной модели тоже делаем именно так.
Читал как-то ветку форума коптерщиков — это достаточно частая причина нестабильного висения.
А магнитный балансир я собрал из металла из леруа мерлен + два магнитика на шляпки винтов, зажим-балансир для винтов из хобби магазина. Винтами можно регулировать расстояние от магнита до оси балансира.
А я о футабе мечтаю… :)
Спасибо за ваши обзоры — очень познавательно!
Если рассматривать квад для съемки на ГоПро 3 (как по работе так и для красивых кадров с путешествий) лучше начать собирать самому, например по вашему рецепту или выбрать готовый фантом 2 с подвесом H3-3D?
Загорелся тоже заняться моделированием, чувствую по душе мне это будет. ))
Есть маленький вопрос. Т.к. я начинающий или даже сказать нулевой пилот. Какой коппер взять для учебы(из недорогих) но чтоб был совместим с рекомендованной вами аппаратурой FS-TH9XB. Так сказать буду начинать собирать с аппаратуры, зарядка ну т.д. и двигаться в сторону примерно как у вас в обзоре.