Привет любителям квадрокоптеров и интересующимся!
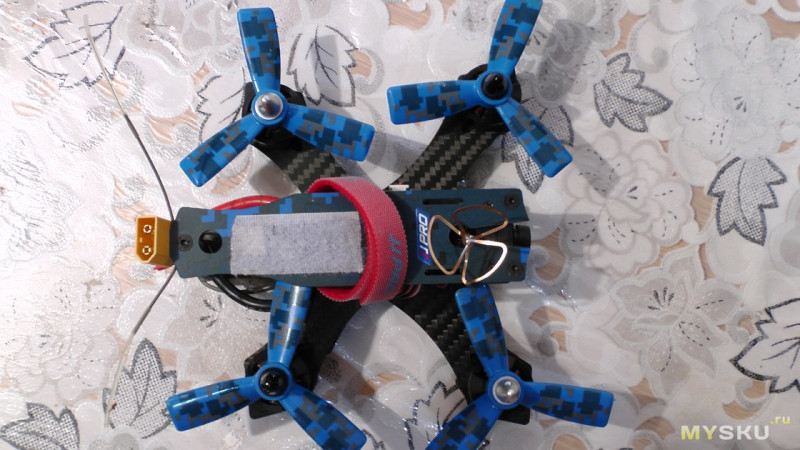
Сегодня обозреваю модель 130-го размера (130 мм между осями моторов по диагонали) в полной комплектации JJRC JJPRO P130 Battler.
Сразу скажу, что модель достаточно спорная (по весу перебор), но интересная по ценнику.
Кого заинтересовало — прошу под cut
Доставка заняла 17 дней (отправлено было 13 марта) — неплохо:
Состояние упаковки я бы оценил на 4:
Обратная сторона:
Но внутренняя упаковка выше всяких похвал. Можно играть в футбол (как любят делать на почте) и содержимое останется целым:
Зарядное устройство JJPRO B3 Pro имеет побаночный контроль напряжения:
и может заряжать аккумуляторы 2S и 3S:током 800мА:то есть, зарядка штатного аккумулятора занимает чуть больше часа.
Инструкция номинальная, как говорится — «ни о чём»:Производитель намекает нам, что этот квадрик не для новичков. Как первый покупать крайне не рекомендую. Нужен приличный опыт и познания в компьютерной технике.
Запасные пропеллеры размера 3045:Это хорошо. Для гоночных квадриков пропеллеры — первый расходник.
Аккумулятор 3S 850мАч 30С:весит 70г:
и обеспечивает 4-5 минут активного полёта.
Моторы и регуляторы поддерживают напряжение 14,8В, поэтому протестируем этот квадрокоптер и на аккумуляторе 4S 1000мАч:Правда, весит он ровно в полтора раза больше (105г), что может полностью нивелировать увеличение тяги.
Передатчик Flysky i6 в представлении не нуждается. Надёжная бюджетная модель:
Питание от четырёх элементов формата АА:
Очень цепкие стики регулируемой длины:
Есть две «крутилки» для управления подвесом:
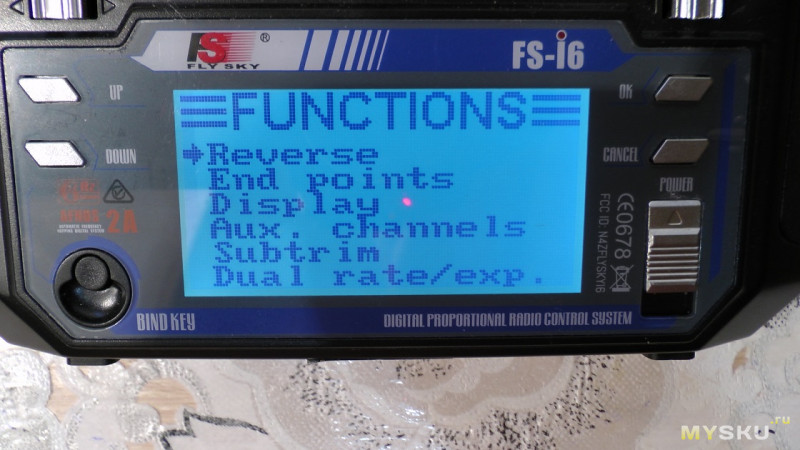
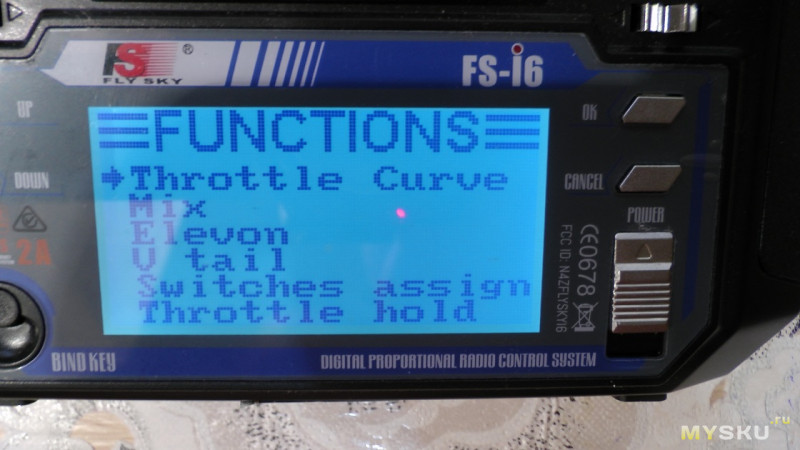
Меню на английском языке, простое и понятное для освоивших хотя бы школьный курс:
Настройки коптера, первый экран:
Второй экран:
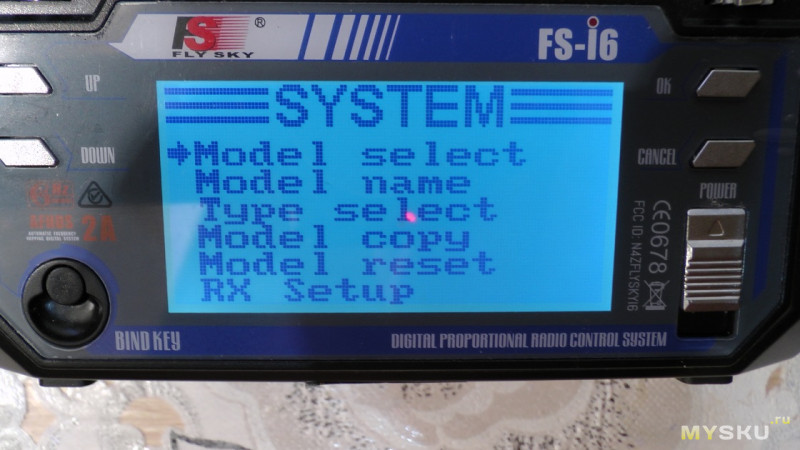
Системное меню, первый экран:
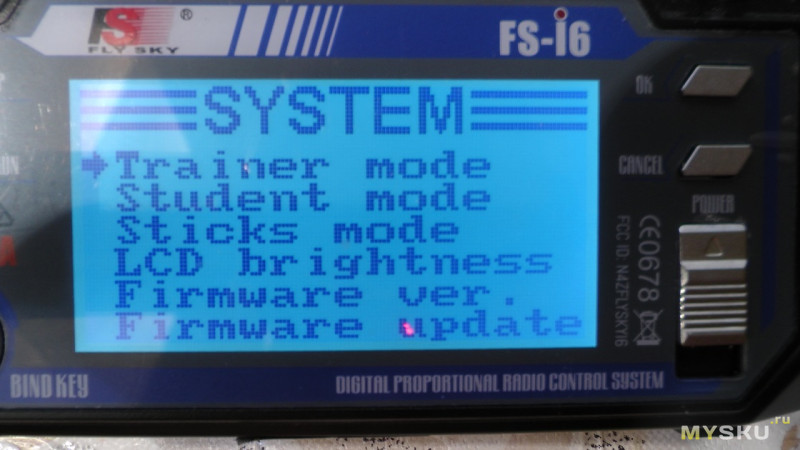
Второй экран:
Особенности и характеристики квадрокоптера (перевод со страницы магазина):
Полётный контроллер CC3D
Прочная рама из карбона и стекловолокна (сэндвич)
Возможность 3D пилотажа
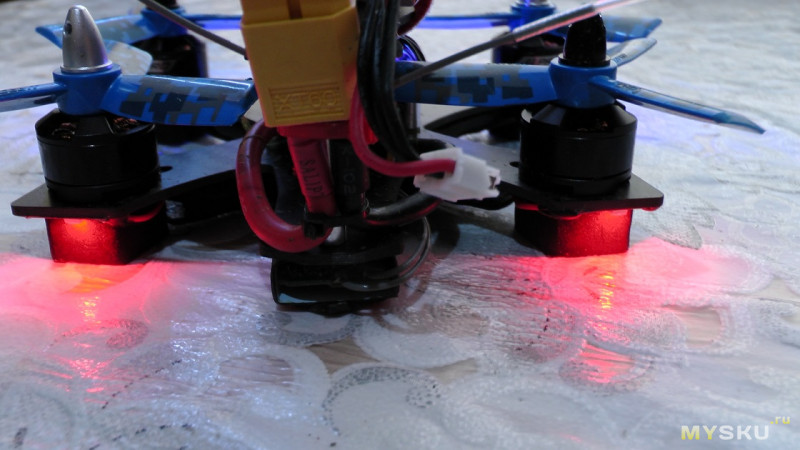
Светодиодная подсветка для ночных полётов
Бесколлекторные моторы 1806 2300KV. Поддержка батарей 2-4S Lipo
Курсовая камера 800TVL с передатчиком 5.8G 40ch
Регуляторы Flycolor 12A, максимальный ток 18A, поддержка 2-4S Lipo
Диагональ между осями моторов: 130мм
3 цвета на выбор
Приёмник: FS-iA6 6CH
Камера снабжена сенсором 1/3" CMOS
Угол обзора по горизонтали: 150°
Диаметр линзы: 2.1мм
Видеопередатчик работает в системах NTSC/PAL
Сопротивление: 75 Ohm
Выходной сигнал: 12-14dB
Мощность: 25mW
Количество каналов: 40CH
Аккумулятор: 11.1V 850mAh 30C Li-po
Размеры аккумулятора: 65 * 25 * 23mm
Полётное время 5-6 минут
Время зарядки около 60 минут
Вес квадрокоптера без аккумулятора:Как мне кажется, для 130-го размера полётный вес 283 грамма — явный перебор. Минус.
Вид анфас:Наклон камеры регулируется в достаточно широком диапазоне.
Есть разъём miniUSB для настройки контроллера, к которому мне не удалось подключиться:Пробовал с двух ноутбуков (Win7Prof64 и Win10Home) тремя разными кабелями посредством двух программ (Openpilot и Librepilot) — но неудача. Посоветовался с опытным товарищем, который сказал, что у него на Win7 тоже проблемы, а вот с XP всё замечательно. Я посчитал нонсенсом откат серьёзной машины на XP для настройки этого квадрика, поэтому буду дальше тестить в заводских настройках.
Снизу:Спорное решение. Самоклейка будет собирать под себя всю пыль и грязь.
На мой взгляд, крепление регуляторов было бы надёжнее, если бы было выполнено с помощью пластиковых хомутов:
Маркировка моторов:к ним претензий нет (смотрите видео распаковки).
Полётный контроллер CC3D:
Светодиодная подсветка не вызывает нареканий:
Видео распаковки и облёта:
Тест аккумулятора 4S и FPV полёт с крашем:
Купон на скидку 20$ LCXRM6853
Подведём итоги обзора:
В «плюсе» имеем полный комплект, готовый к полёту «из коробки», вполне гуманный ценник с учётом купона, прочнейшую карбоновую раму, прочные пропеллеры, неплохую курсовую камеру, поддержку 4S батарей, проверенный передатчик.
В «минусе» — устаревший контроллер с проблемной настройкой, большой вес, спорную компоновку регуляторов.
Покупать или нет — выбор сугубо индивидуальный. Я лишь постарался предоставить максимально объективную информацию.
Только хотел по это написать, поддерживаю. У самого отдельный логический диск под виртуалки. То для роутера Xiaomi Прометей под Linux подавай, то для прошивки раций XP надо, то 64 разрядная вместо моих 32… Место много не занимает, а пользы вагон.
Думаю не обязательно накатывать на ноут. Где-то на сайте майкрософта есть куча разных версий винды для тестировщиков веб-сайтов. Образы прекрасно импортируются в виртуалбокс и работают.
Как вам выше написали, это делается за полчаса и не портит вашу рабочую операционку.
Если коротко:
1. Скачиваем Oracle VM VirtualBox с www.virtualbox.org
1.1 Устанавливаем и запускаем.
2. Вставляем установочный диск WindowsXP или образ ISO выбираем в качастве установочного.
3. Устанавливаем Windows как обычно, только в качестве виртуальной системы.
4. Запускаем и пользуемся. После использования закрываем мкно и возвращаемся в текущую операционку.
5. Возможно, понадобится установить драйвера. Также не исключено, что соединяться с контролером все равно не захочет — такое случается на виртуалках (хотя и достаточно редко).
не все БилГейтсы и умеют ставить виртуальные машины на ПК
simavskij
На ноуте, где стоит Win7, нажимаешь на запускающий файлик Openpilot или Librepilot правой клавишей, в самом низу выбираешь СВОЙСТВА, далее выбираешь вкладку СОВМЕСТИМОСТЬ, ставишь галочку в Запускать в режиме совместимости с: Windows XP (выбрать в выпадающем меню). Пробуешь запустить Openpilot или Librepilot по новой.
на видео он летает… но не какой автоматики… отпустил стик или чуть не туда нажал и… потерял винты
.
и хорошо если ещё батарею не пробьёшь (так как она не защищена )
ХЗ, как объяснить… Это гоночный квадрик. Следовательно, нужен опыт пилотажа не на уровне новичка. Как первый и даже второй аппарат не годится. Разобьёте с гарантией 100%.
Всегда думал, что слова «гоночный» и «хорошая аэродинамика» в некотором смысле синонимы. Видимо, этот квадрик это обошло стороной. У меня самого фантом 4, если что.:)
Сравнивать фантом с гоночным квадриком- тоже самое, что сравнивать Мерседес нашего любимого патриарха и КамАЗ, участвующий на Дакаре. Малость цели отличаются, или самую малость.
Для гоночных квадриков до 250 размера никакая аэродинамика не нужна, т.к. увеличение веса для их управляемости гораздо чувствительнее. Это не фантом с высокой парусностью, который должен летать плавно и снимать качественное видео
Здравствуйте
Давно хотел приобщиться к клубу гонщиков на квадрокоптерах. Но не знаю с чего начать копать эту тему
Посоветуйте, пожалуйста, что нужно купить начинающему? Заранее спасибо
Ну, не настолько все просто, чтобы в одном комментарии отписать… Если коротко, то я лично начал с постройки 500 размера, так как сразу с гоночным вы просто не справитесь. Постройте 450-500, научитесь тысяче вещей на его основе, а потом гоночный построить для вас будет раз плюнуть. Можете попробовать сразу, конечно, но я бы не советовал.
В общем, так (муськовчане, не сочтите за рекламу):
1. Смотрим серию видео www.youtube.com/watch?v=oYB5XStjWKs&list=PLOT_HeyBraBuv_lUBfvNJs9sE7AbNT4U0
2. Как вариант, также www.youtube.com/watch?v=YpjNDHv0ipI&index=7&list=PLITAVEgbjl8rdD02f95D4XVmC2ShltGh5
3. Смотрим эти два хороших обзора с инструкциями, чтобы понять, потяните ли:
Коптеры 450-500 размера это совсем другой класс. Ничего сложного в сборе гоночного квадрика нет вообще. Вот то что Вы советуете (коптер на APM) гораздо сложнее для новичка. Не рекомендую собирать в качестве первого коптер на больших рамах.
Купите, например, обозреваемый комплект, дешевый видеошлем и побольше аккумуляторов. И летайте на здоровье! Не бойтесь крашей, гоночные квадрики рассчитаны на это. Гораздо хуже зависнуть на верхушке высокого дерева :(
Важно, особенно для начинающих. Если этот режим отсутствует, нужно подключать полетный контроллер к компьютеру и разбираться.
Я не встретил в обзоре слово «стабилизация», возможно оно из видео?
Странно, 70% акроквадриков идет именно на cc3d.
И запасы их еще велики.
В принципе в cc3d заливаются вполне современные прошивки, типа ClearFlight, Betaflight, iNav, Harakiri.
И вполне работают, с некоторыми ограничениями, последние две даже умеют навигацию по gps.
Конечно скоро сс3d снимут с поддержки, покупать его, а также остальное на stm32f1, не имеет смысла, но если он уже есть, почему бы не использовать.
Так что проблему с драйвером придется решать
Это плохой выбор для начинающего. Во-первых, квадрокоптером 130 размера управлять сложнее чем 210-250, он более резкий. Во-вторых, в 2017 году покупать новичку квадрокоптер на контроллере CC3D это обрекать его на вечную муку с поиском решений проблем данного древнего контроллера, которые давным давно решены на современных контроллерах — на форумах и группах вопросы по CC3D как правило остаются без ответа, т.к. народ уже не помнит данного динозавра, т.к. уже несколько лет им никто не пользуется. Плюс отсутствие поддержки современных прошивок, которые очень далеко ушли вперед. Вот и скидывают китайцы неликвид со скидкой, якобы «для новичков».






 током 800мА:
током 800мА: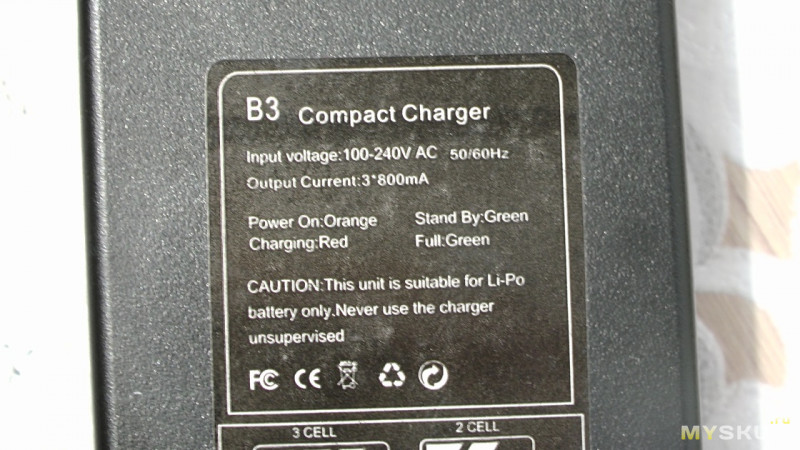 то есть, зарядка штатного аккумулятора занимает чуть больше часа.
то есть, зарядка штатного аккумулятора занимает чуть больше часа. Производитель намекает нам, что этот квадрик не для новичков. Как первый покупать крайне не рекомендую. Нужен приличный опыт и познания в компьютерной технике.
Производитель намекает нам, что этот квадрик не для новичков. Как первый покупать крайне не рекомендую. Нужен приличный опыт и познания в компьютерной технике. Это хорошо. Для гоночных квадриков пропеллеры — первый расходник.
Это хорошо. Для гоночных квадриков пропеллеры — первый расходник. весит 70г:
весит 70г:
 Правда, весит он ровно в полтора раза больше (105г), что может полностью нивелировать увеличение тяги.
Правда, весит он ровно в полтора раза больше (105г), что может полностью нивелировать увеличение тяги.




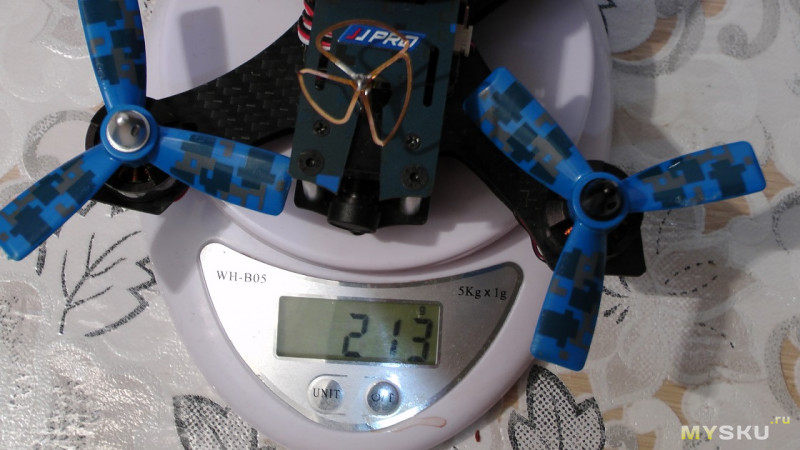 Как мне кажется, для 130-го размера полётный вес 283 грамма — явный перебор. Минус.
Как мне кажется, для 130-го размера полётный вес 283 грамма — явный перебор. Минус. Наклон камеры регулируется в достаточно широком диапазоне.
Наклон камеры регулируется в достаточно широком диапазоне.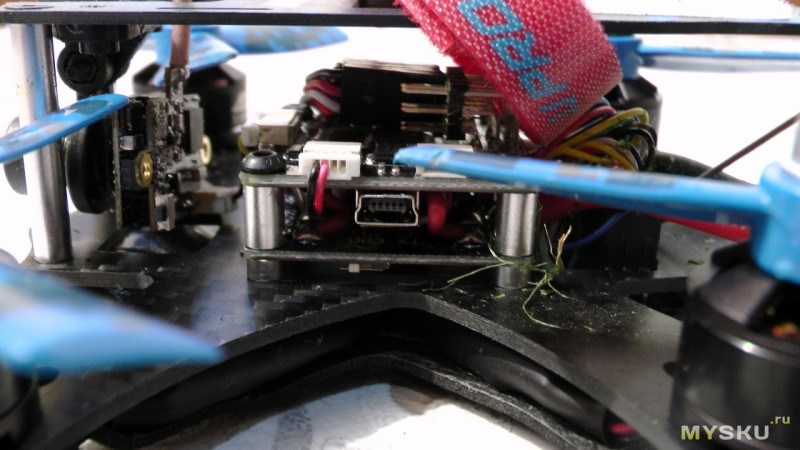 Пробовал с двух ноутбуков (Win7Prof64 и Win10Home) тремя разными кабелями посредством двух программ (Openpilot и Librepilot) — но неудача. Посоветовался с опытным товарищем, который сказал, что у него на Win7 тоже проблемы, а вот с XP всё замечательно. Я посчитал нонсенсом откат серьёзной машины на XP для настройки этого квадрика, поэтому буду дальше тестить в заводских настройках.
Пробовал с двух ноутбуков (Win7Prof64 и Win10Home) тремя разными кабелями посредством двух программ (Openpilot и Librepilot) — но неудача. Посоветовался с опытным товарищем, который сказал, что у него на Win7 тоже проблемы, а вот с XP всё замечательно. Я посчитал нонсенсом откат серьёзной машины на XP для настройки этого квадрика, поэтому буду дальше тестить в заводских настройках.
 Спорное решение. Самоклейка будет собирать под себя всю пыль и грязь.
Спорное решение. Самоклейка будет собирать под себя всю пыль и грязь.
 к ним претензий нет (смотрите видео распаковки).
к ним претензий нет (смотрите видео распаковки).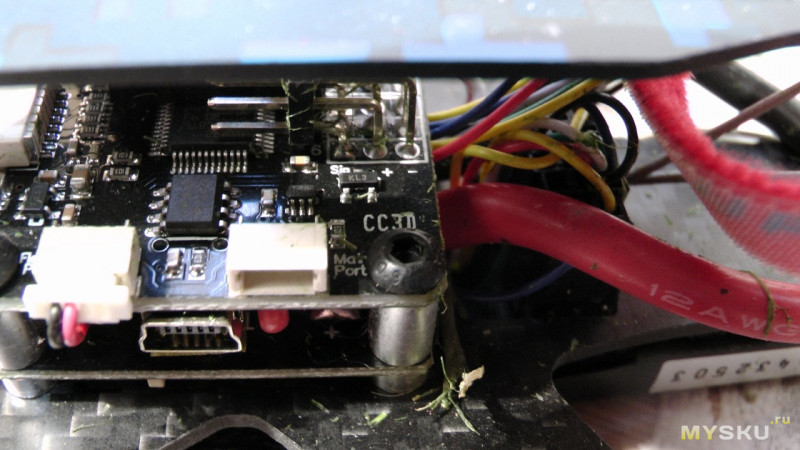

Поставить virtualbox и там хочешь XP, хочешь 7-8-10-Линух, что угодно.
2. можно установить livecd
3. и можно установить нужную ос дополнительной
а учитывая
я бы не стал такое предлагать simavskij
да и на ос7 не плохо работе режим совместимости
Если коротко:
1. Скачиваем Oracle VM VirtualBox с www.virtualbox.org
1.1 Устанавливаем и запускаем.
2. Вставляем установочный диск WindowsXP или образ ISO выбираем в качастве установочного.
3. Устанавливаем Windows как обычно, только в качестве виртуальной системы.
4. Запускаем и пользуемся. После использования закрываем мкно и возвращаемся в текущую операционку.
5. Возможно, понадобится установить драйвера. Также не исключено, что соединяться с контролером все равно не захочет — такое случается на виртуалках (хотя и достаточно редко).
simavskij
На ноуте, где стоит Win7, нажимаешь на запускающий файлик Openpilot или Librepilot правой клавишей, в самом низу выбираешь СВОЙСТВА, далее выбираешь вкладку СОВМЕСТИМОСТЬ, ставишь галочку в Запускать в режиме совместимости с: Windows XP (выбрать в выпадающем меню). Пробуешь запустить Openpilot или Librepilot по новой.
«мальчик жестами объяснил — что его зовут Хуан»
.
и хорошо если ещё батарею не пробьёшь (так как она не защищена )
?
У вас какой размер?
фантом4 — пример квадрика с хорошо продуманной аэродинамикой.
Давно хотел приобщиться к клубу гонщиков на квадрокоптерах. Но не знаю с чего начать копать эту тему
Посоветуйте, пожалуйста, что нужно купить начинающему? Заранее спасибо
В общем, так (муськовчане, не сочтите за рекламу):
1. Смотрим серию видео www.youtube.com/watch?v=oYB5XStjWKs&list=PLOT_HeyBraBuv_lUBfvNJs9sE7AbNT4U0
2. Как вариант, также www.youtube.com/watch?v=YpjNDHv0ipI&index=7&list=PLITAVEgbjl8rdD02f95D4XVmC2ShltGh5
3. Смотрим эти два хороших обзора с инструкциями, чтобы понять, потяните ли:
mySKU.me/blog/china-stores/26614.html
mySKU.me/blog/china-stores/30852.html
4. Удачи!
Я не встретил в обзоре слово «стабилизация», возможно оно из видео?
youtu.be/CDL9jnsSo3A?t=9m31s
Скорее всего брак контроллера.
И запасы их еще велики.
В принципе в cc3d заливаются вполне современные прошивки, типа ClearFlight, Betaflight, iNav, Harakiri.
И вполне работают, с некоторыми ограничениями, последние две даже умеют навигацию по gps.
Конечно скоро сс3d снимут с поддержки, покупать его, а также остальное на stm32f1, не имеет смысла, но если он уже есть, почему бы не использовать.
Так что проблему с драйвером придется решать