Добрый день, уважаемые читатели mySKU.
Предлагаю обзор довольно интересного квадрика JJRC H16, он же Tarantula X6 или, как сообщает нам страничка товара, «New Version Yizhan Tarantula X6 — 1 2.4G 4CH RC Quadcopter Hyper IOC UFO».
Обзор содержит множество фотографий (распаковка, внешний вид, внутреннее устройство), видео облета и тестирования полетных возможностей, а также вскрытие и ремонт.
Распаковка
Приехал JJRC H16 ко мне вот в таком печальном виде.
Упаковочная коробка далеко не из самого прочного картона и малость помялась в пути, что печально… Это достаточно привлекательная игрушка в качестве подарка для подростка. А как его дарить, если вся коробка помятая?
Но тем не менее, содержимое коробки цело и не пострадало!
Укомплектован JJRC H16 практически полностью, нет только батареек для пульта.
Комплект поставки:
сам JJRC H16 с установленными винтами
пульт управления
аккумулятор
зарядное устройство
шасси
защита винтов
запасной комплект винтов
отвертка
крепеж для шасси и защиты
инструкция
Внешний обзор
Дизайн самого JJRC H16 довольно спорный, кому-то нравится, кому-то нет. Стилизован он, под нечто членистоногое, отсюда и такое название.
Корпус сделан из пластика с прозрачными вставками, местами окрашен. В моем случае — это черный цвет, так же есть вариант в синем окрасе.
За прозрачными вставками установлены светодиоды, которые светятся при включении.
Вес JJRC H16, с установленными винтами и шасси, составляет — 201г.
Вес с аккумулятором (полетный вес) — 264г.
Пульт оказался довольно мелкий, чуть больше ладони.
Но при этом, требует 6 элементов питания типа АА (пальчиковые батарейки).
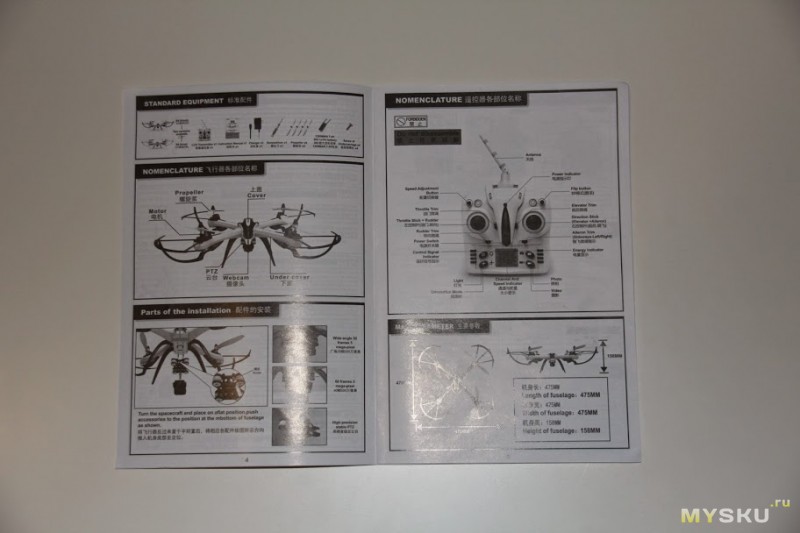
Назначение органов управления пульта, интуитивно понятны, но для наглядности, покажу на изображении ниже.
Аккумулятор, идущий в комплекте 2х баночный LiPo, имеет емкость 1200 mah и токоотдачу 30C (2S-1200mah 30C).
Он вставляется в аккумуляторный отсек на нижней стороне корпуса JJRC H16. Силовой разъем JST. Выключатель питания не предусмотрен, JJRC H16 включается сразу при подключении батареи.
Инструкция подробная, но только на двух языках (китайский и английский).
Зарядное устройство ничего примечательного не имеет. Стандартный зарядник на 650мА, с индикатором в виде светодиода.
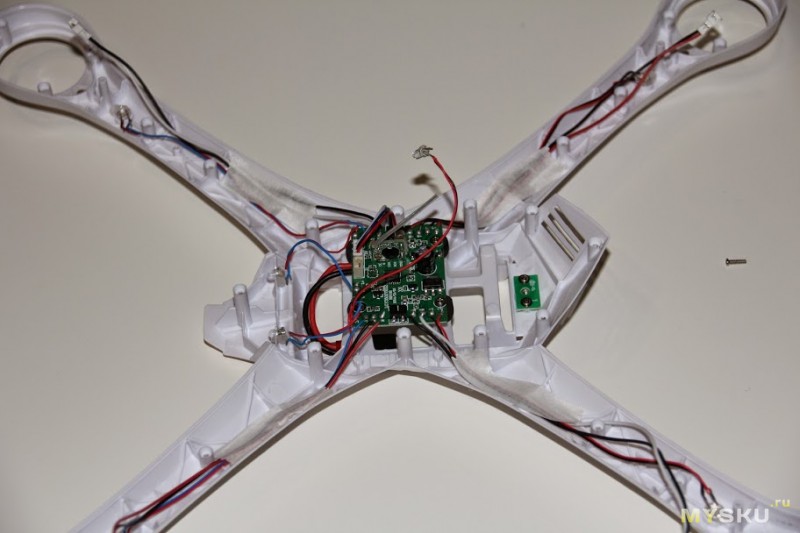
Дабы оценить качество устройства, его надо разобрать. Приступим. Конструкция корпуса JJRC H16 скреплена множеством мелких винтиков. Комплектная отвертка неплохо с ними справляется. Итого: 30 винтиков и он разобран.
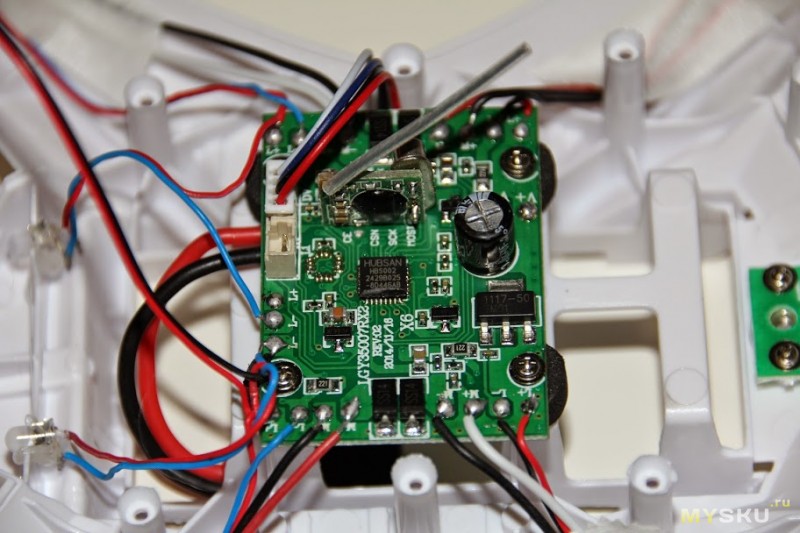
Теперь можно оценить качество сборки. Что интересно, плата контроллера установлена на демпфирующих проставках, а чип имеет надпись HUBSAN.
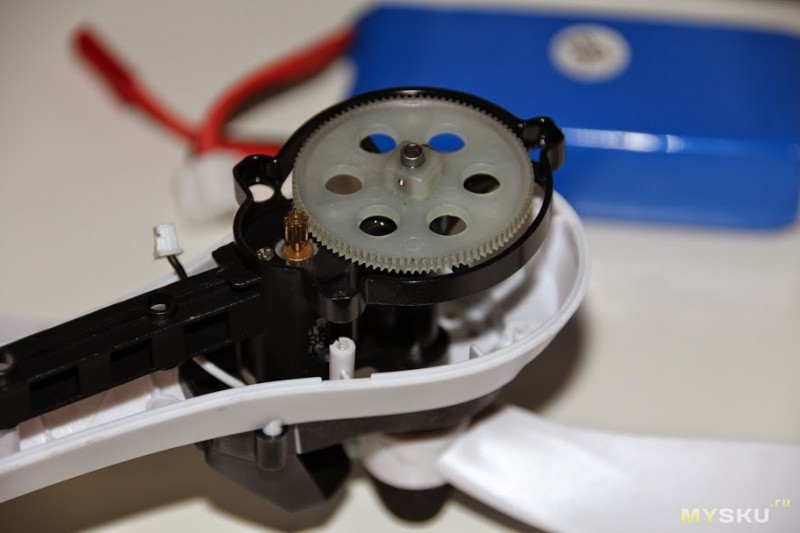
Привода винтов собраны на собственных подрамниках.
Можно вынуть целиком весь привод.
Винт одевается на вал и фиксируется мелким шурупом сбоку. Не очень удачное решение, крепить его не удобно (проблематично попасть в отверстие на валу) и имеется люфт (может разбить отверстие в которое вкручен шуруп и он вылетит).
Моторы в них закреплены еще одной парой винтиков. Подключаются через разъем, в случае замены паяльник не потребуется.
Аккуратно собираем в обратном порядке и готовимся летать.
Подготовка к полету
Для запуска JJRC H16 в небо, нужно выполнить ряд не сложных действий.
Необходимо, зарядить аккумулятор. С завода он приходит в, так называемом, Storage состоянии (это порядка 60% заряда).
Установить шасси. Они крепятся 4 винтами (по 2 на каждое).
Установить защиту. Это по желанию, если переживаете за сохранность винтов или боитесь под них попасть, то ставим. Крепятся они 4 винтами каждая, итого 16шт.
Вставить батарейки в пульт. Батарейки в комплект не входят. Потребуется 6 элементов типа АА (пальчиковые батарейки).
Установить пропеллеры. Бывает, что JJRC H16 приходит со снятыми винтами, тогда их нужно установить. При этом важно их не перепутать, так как они вращаются в разные стороны. Для этого, на винтах и на лучах JJRC H16, есть маркировка в виде символов А и В. Соответственно винты А, ставятся на лучи А и наоборот. Крепятся пропеллеры мелкими винтиками (идут в комплекте).
Если все готово, можно идти летать.
Облет
Безветренной погоды для облета не дождался, по этому JJRC H16 изрядно болтало, но он легко справлялся с довольно сильными порывами ветра.
Попробовал полетать на разных расходах (доступно 3 варианта 40, 60 и 100%), проверил безголовый режим полета и взлет с броска (подкидывал и включал газ).
Как видите, летает JJRC H16 замечательно. Очень понравился в полете, сказывается колоссальный запас тяги. Хорошо сбалансирован, вибрации практически не ощущаются. Хорошие, точнее сказать, эффективные пропеллеры. Справляется с довольно сильным ветром, а по ветру, да на 100% расходах, вообще — ракета.
С дальностью управления проблем не было, улетал практически в точку (на видео он, в этот момент, вообще не виден) и связь не пропадала.
Ремонт
История моего JJRC H16 началась с неожиданной поломки. Как-то слышал поучительное высказывание — «Вся электроника работает на сжатом дыму! И если он выйдет, то она перестанет работать!». Так и случилось.
При первой же попытке проверить работоспособность JJRC H16, из него пошел дым и у него, перестал вращаться один из винтов.
Спешно вынув аккумулятор, я сразу увидел в чем проблема.
Видимо один из силовых чипов, к которому подключается мотор, оказался «не герметичным» и из него вышел дым. Благо их 4 шт. на плате, можно посмотреть маркировку.
В наших радиомагазинах найти такой не удалось. Пришлось смотреть спецификацию чипа для подбора аналога. Выяснилось, что это сборка из двух полевых транзисторов N типа. Немного погуглив, нашел аналог в магазине Чип и Дип, по 27р штука.
Замена не хитрая. Аккуратно срезал скальпелем сгоревший чип (чтобы не повредить плату), паяльником снял оставшиеся ножки и припаял новый. Сразу же проверил (не собирая), мотор зажужжал.
Делаем вывод, квадрокоптер пригоден для ремонта. И если нет желания, отправлять его на замену по гарантии (как у меня), то можно обратиться в ремонтную мастерскую, к знакомому с паяльником или починить самому.
А если поставить камеру
Как же так, квадрокоптер и без камеры? Непорядок! Срочно надо исправить.
Решил закрепить камеру на самом носу. Это избавит видео картинку от элементов шасси в кадре, а так же обеспечит свободный доступ к батарейному отсеку.
Вот так это выглядит на квадрокоптере.
Это аналог экшен камеры Mobius, EKOO S090 (обзор на нее делал ранее). Камеру закрепил, пошел летать.
На первом видео летал потихоньку, на минимальных расходах. Попробовал подняться высоко над городом. Камера снимала в режиме — HD1080P 30FPS.
А потом поставил расходы побольше и погонял на сколько хватало пространства. Камера снимала в режиме — HD720P 60FPS.
Впечатления
+ Хорошая цена для квадрокоптера такого размера.
+ Отличные полетные качества.
+ Наличие безголового режима полета.
+ Впечатляющая тяговооруженность.
+ Хороший запас полетного времени — 14 минут.
+ Управление подсветкой с пульта (при желании можно задействовать для собственных нужд).
— Слабенькое и неустойчивое шасси.
— Неудачное решение по креплению винтов, трудно попасть мелким винтиком в отверстие на валу.
— Отсутствие выключателя питания.
— Набор расходов. Хотелось бы иметь возможность регулировать их в более широком диапазоне.
Квадрокоптер JJRC H16 больше всего понравился своими летными характеристиками. Маневренный, шустрый и очень стабильный. Что с лихвой перекрывает его мелкие недочеты.
Отличная модель для обучения полетам на открытом воздухе.
14 минут — это рекорд при этом ценнике!
А на сколько снижается время полета при закрепленной камере?
И есть ли функция управления камерой через пульт (включени-выключение, фото-видео)?
С камерой время полета естественно меньше, судя по видео, примерно минут 10.
Смотрите схему с пультом, там есть кнопка видео и кнопка фото. Они для штатной камеры. У меня комплектация без камеры.
Отличный обзор. А камера в таком положении не заваливает квадрик вперед?
Сам жду такой же квад + камеру ксаоми.
Скоро тут обзоров на этот квад будет полно )))
Отвечу за автора… есть возможность управлять родной камерой с пульта, кнопки есть. У автора своя камера…
Отличный обзор.
Вот такой вопрос. Как долго живут моторы, ориентировочно? На Syma X5 за зиму+весну поменял два десятка моторов. Летаю много, в основном по квартире, но в агрессивной манере. Т.е. движки более-менее держатся. А на JJRC H8C (7.4V) налет очень мал, при этом уже заменил 4 мотора. Стоимость их в 2 раза выше, а горят чаще раза в 3-4 по сравнению с Симой. Тарантула тоже 7.4V, но движки конструктивно немного отличаются от «обычных» цилиндрических. Может быть и щеточки дольше живут?
Да нет, однушка ))
На Симе как раз интереснее по комнате гонять, типа дрифта или картинга. У неё отзывчивость мгновенная. Наклоны на Hi — то, что нужно. На улице она не интересна. Эта стихия для H8C с его тягой и огромными наклонами. Но наклоняется он медленно, поэтому только улица. В его мозгу тоже чип с надписью Hubsan. Думаю, повадки у Тарантулы и H8C схожи.
Замените втулки на подшипники — www.banggood.com/ru/Wholesale-MJX-F47-F647-RC-Helicopter-Spare-Parts-Bearing-p-57426.html
Если брать сразу комплект из 8 штук — цена без трека выходит 7$. Пишут, что втулки очень нагреваются и это как-то влияет на ресурс двигателей. Не знаю по чему, но люди прямо восхищаются этими подшипниками.На ютюбе есть отличное видео по замене подшипников.
Вот фото движка Тарантулы, который умер от грязи и пыли. Видны приличные щетки. Ответная часть на роторе большего диаметра и тоже внушает доверие. На H8C, как и большинстве других аппаратов щетки — тончайшие усики.
Есть безголовый режим. Включаешь его и тянешь на себя.
Автовозврат имеют только БПЛА с автопилотом при ЖПС, минимальная цена такой системы 70-100 баксов.
Автовозврат без GPS сейчас есть у многих недорогих квадов. Но чаще всего они возвращаются не туда, откуда их запускали ))) Как подсказали муськовчане, благодаря эл.компасу квада и при правильной привязке квада к пульту, автовозврат более-менее верно работает.
Автовозврат работает с помощью GPS, а тут его нет. Есть безголовый режим, с его помощью можно управлять квадрокоптером относительно себя, не зависимо от его положения. На видео с облетом я это показывал. Улетал от себя и вращал квадрокоптер во время удаления, а потом возвращал и он прилетал обратно, без проблем.
Не знаю как на h8c, но на тарантуле я делаю так:
— включаю пульт;
— ставлю на ровную поверхность задней частью к пульту квадрик;
— подключаю батарею;
— левый стик резко вверх, затем плавно вниз (все, безголовый режим работает);
— во время полета, когда «потерялся», включаешь кнопку «ориентация» и ведешь квадрик в нужном направлении правым стиком: если он впереди — стик вниз, слева — стик вправо и т.д.
левый стик резко вверх, затем плавно вниз (все, безголовый режим работает);
— резко или плавно — не важно, это же обычное привязывания пульта к кваду!
Основное требование для Headless mode — привязывать пульт к кваду, а самому в этот момент находится сзади квада — ну чтоб он к вам попой (задом) стоял.
Да, все нормально. Налет уже приличный, греется примерно так же как и остальные транзисторы. Ну и я их взял сразу 4 шт, на случай если он не подружится с местными ))
А из-за чего сгорел? Мой то сразу полыхнул, я даже взлететь не успел. Посчитал что бракованный транзистор попался. А ваш вроде уже летал и даже камеру в аквабоксе таскал.
если честно так и не понял что послужило причиной, но видимо моя глупость отчасти. сдох один движок во время полета (не налетал 20 полетов). домой пришел стал пытаться стартовать квадрик, вместе со сдохшим движком на небольших оборотах, а дальше… дальше я понял, что сдох транзистор по черному дыму, и неприятному запаху. купил 2 транзистора. сегодня силами знакомого пытался перепаять — безрезультатно. завтра сгоняю к другому знакомому.
Всем привет! ребята может кто сталкивался с такой проблемой.после нескольких минут полета коптер самопроизвольно наклоняется в любую сторону да так что стикер не вытягивает. Хороший удар об землю и все опять нормально. Через пору минут дальнейшего полета все повторяется опять.
Может быть дело в калибровки гираскопа. Сгорел двигатель я заказал новые, пришли поставил и сделал калибровку и все началось. До этого все норм было только безголовый режим работал неправильно.
Privet!!!
Da, klasnyi obzor!!!
U moego Tarantula oshen bystro saditsya batareya 2 — 3 min
izmeryal robochii tok — 8 amper, nu i padaet do «0»
V chom mothet byt problema?
























А на сколько снижается время полета при закрепленной камере?
И есть ли функция управления камерой через пульт (включени-выключение, фото-видео)?
Смотрите схему с пультом, там есть кнопка видео и кнопка фото. Они для штатной камеры. У меня комплектация без камеры.
Сам жду такой же квад + камеру ксаоми.
Скоро тут обзоров на этот квад будет полно )))
Отвечу за автора… есть возможность управлять родной камерой с пульта, кнопки есть. У автора своя камера…
У этих камер обычно качество не алё, и они того не стоят.
Много информации по этому поводу здесь — www.rcgroups.com/forums/showthread.php?t=2320902&page=117
А ещё я активно слезу за группой в фейбуке — www.facebook.com/groups/TaratulaQuad/
Вот такой вопрос. Как долго живут моторы, ориентировочно? На Syma X5 за зиму+весну поменял два десятка моторов. Летаю много, в основном по квартире, но в агрессивной манере. Т.е. движки более-менее держатся. А на JJRC H8C (7.4V) налет очень мал, при этом уже заменил 4 мотора. Стоимость их в 2 раза выше, а горят чаще раза в 3-4 по сравнению с Симой. Тарантула тоже 7.4V, но движки конструктивно немного отличаются от «обычных» цилиндрических. Может быть и щеточки дольше живут?
На Симе как раз интереснее по комнате гонять, типа дрифта или картинга. У неё отзывчивость мгновенная. Наклоны на Hi — то, что нужно. На улице она не интересна. Эта стихия для H8C с его тягой и огромными наклонами. Но наклоняется он медленно, поэтому только улица. В его мозгу тоже чип с надписью Hubsan. Думаю, повадки у Тарантулы и H8C схожи.
Если брать сразу комплект из 8 штук — цена без трека выходит 7$. Пишут, что втулки очень нагреваются и это как-то влияет на ресурс двигателей. Не знаю по чему, но люди прямо восхищаются этими подшипниками.На ютюбе есть отличное видео по замене подшипников.
Автовозврат имеют только БПЛА с автопилотом при ЖПС, минимальная цена такой системы 70-100 баксов.
Я о том, что распродажа и постоянная низкая цена — это далеко не одно и то же…
— включаю пульт;
— ставлю на ровную поверхность задней частью к пульту квадрик;
— подключаю батарею;
— левый стик резко вверх, затем плавно вниз (все, безголовый режим работает);
— во время полета, когда «потерялся», включаешь кнопку «ориентация» и ведешь квадрик в нужном направлении правым стиком: если он впереди — стик вниз, слева — стик вправо и т.д.
Основное требование для Headless mode — привязывать пульт к кваду, а самому в этот момент находится сзади квада — ну чтоб он к вам попой (задом) стоял.
Нет, это JJRC H8C (справа) и Tarantula X6 (слева).
Такой вопрос, аккумулятор под крышкой плотно сидит, или есть место между крышкой и аккумом?
ps. у меня, кстати тот же самый транзистор сгорел
Одна дорожка под транзистором малость подгорела, пришлось его немного сместить.
Народ, мне идет такой же. Но пишут что с новой платой куча проблем.
Продавать его или тестить?
Da, klasnyi obzor!!!
U moego Tarantula oshen bystro saditsya batareya 2 — 3 min
izmeryal robochii tok — 8 amper, nu i padaet do «0»
V chom mothet byt problema?