Добрый день (опционально вечер/ночь).
Сегодня будет обзор на GPS приемник и его применение на практике.
ПРЕДИСЛОВИЕ
В общем, я всегда хотел побаловаться с такого рода устройствами, хотелось иметь конкретно трекер, который пишет пройденный путь, но было одно но, хотелось, чтобы трекер был с дисплеем, я вообще люблю разные дисплеи и стараюсь их прикручивать во все, что только можно, такой вот фетиш.
Обзоров на этот GPS приемник было, из самых обширных, немного — штуки 4, один из них реально был хорош, остальные так, описывали в целом. Сильно много повторяться не буду.
Как обычно предупреждение:

Вся ответственность, а именно самостоятельное проникновение в корпус готового изделия с последующим нарушением его целостности работоспособности, лежит на человеке совершившим это действие.
Внешний вид
Размеры данного модуля не большие 35 х 24 мм, и он сможет найти свое место не только в носимой электронике, но и в RC — аппаратах.
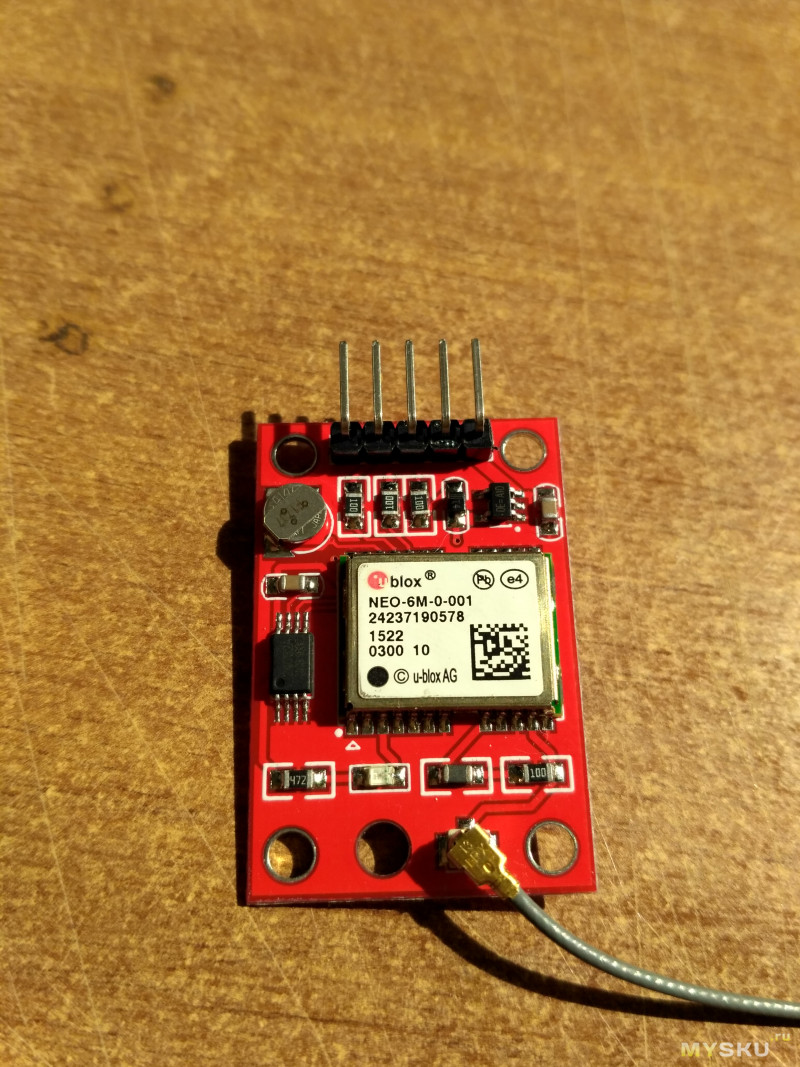
В комплекте идет пассивная антенна:
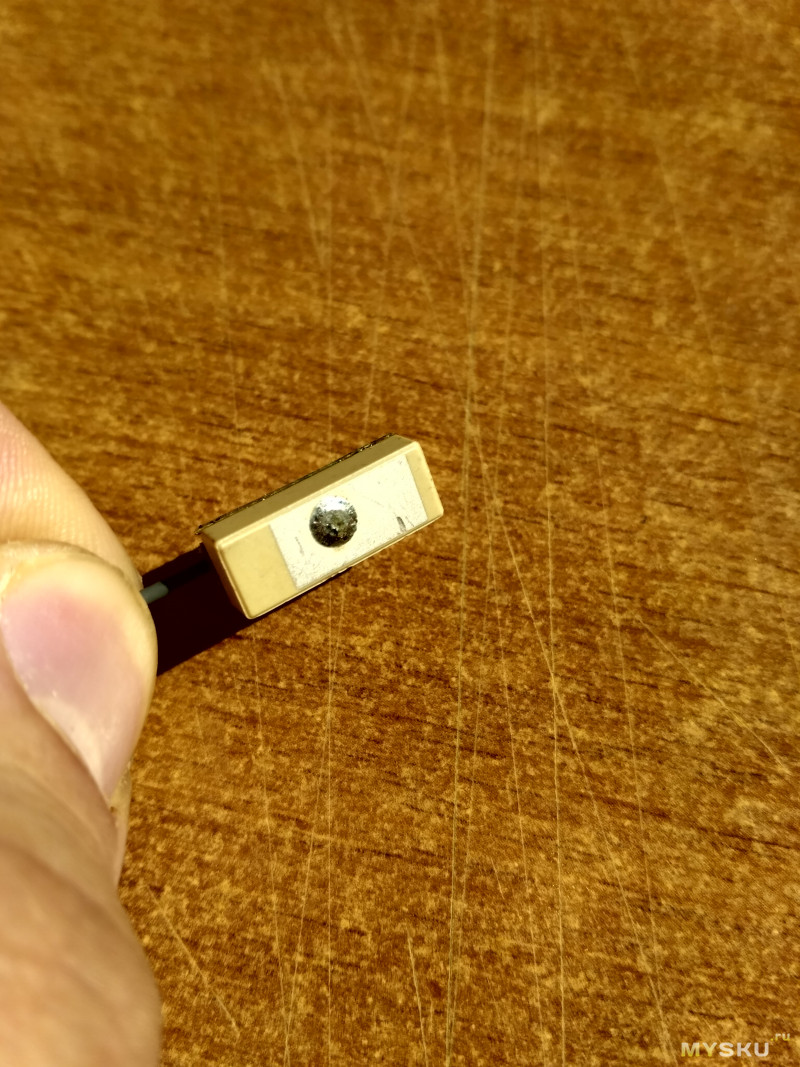
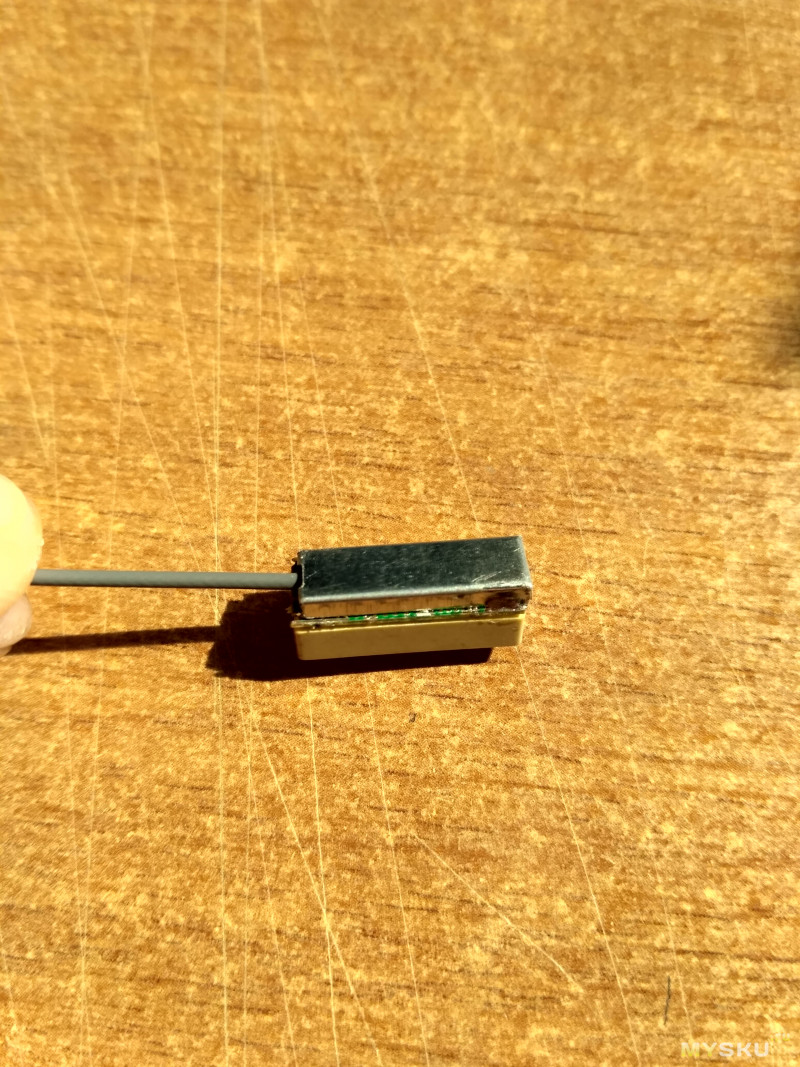
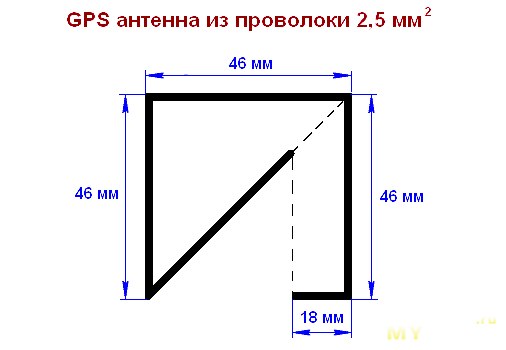
При желании всегда можно заменить активной или изготовить самому, по этой методике:
По запросу, в комментариях, выдам ссылку на мануал.
На сегодняшний день модуль не является устаревшей моделью, и активно используется, + имеется поддержка производителя
даташит с сайта производителя.
А тут находится
страница, ведущая на сайт производителя данного аппарата
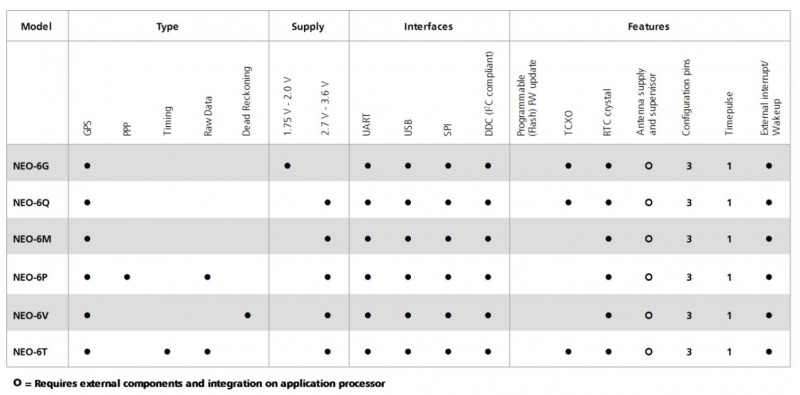
На приведенном изображении кратко описаны возможности данного семейства приемников:
Подключение и проверка модуля на PC
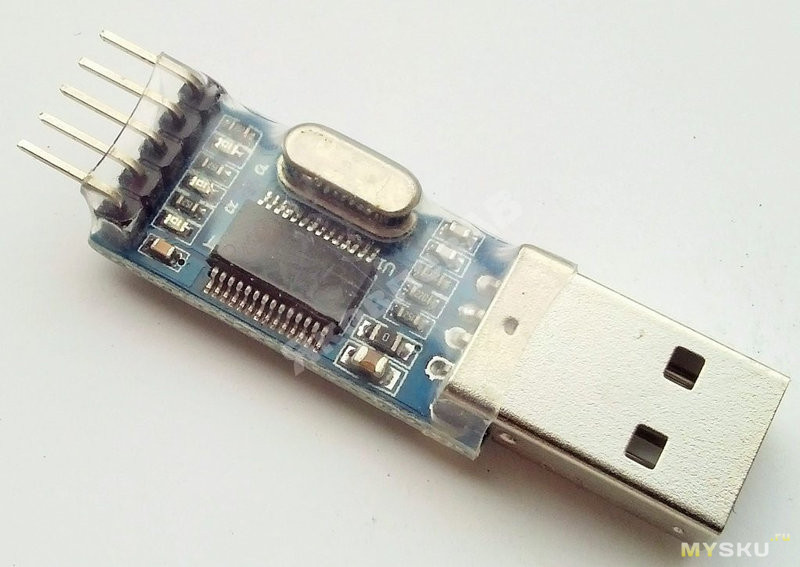
В целом данный приемник можно использовать и для подключения к ПК посредством UART, для этих целей можно использовать переходник USB-UART TTL, которых просто тьма, разнообразных модификаций:
Либо подключить через Arduino. Переходника у меня нет, зато просто тонны всяких ардуин нано и тому подобных, вот их и будем использовать.
А еще Вам потребуется программное обеспечение, U-blox предоставляет его бесплатно, за что им большое спасибо (+ за поддержку).
Доступно по
этой ссылке.
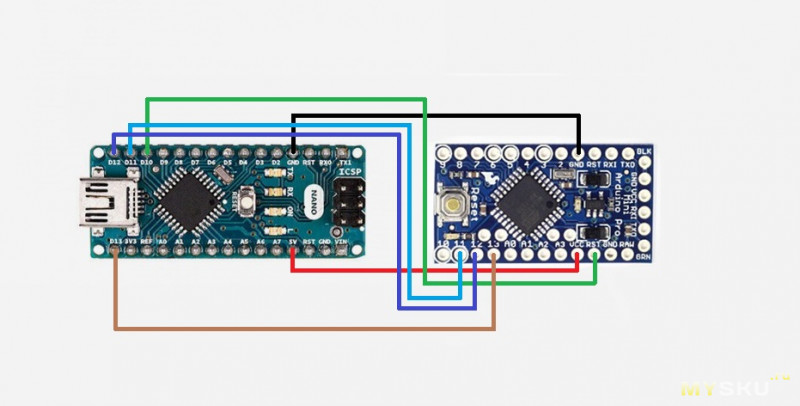
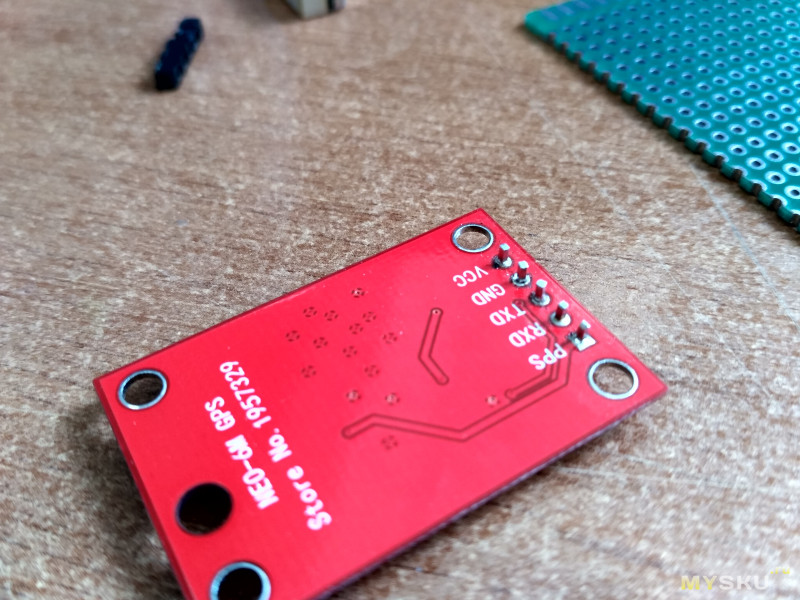
На рисунке ниже я показал, какие линии куда подключать, что бы GPS определился в компьютере:
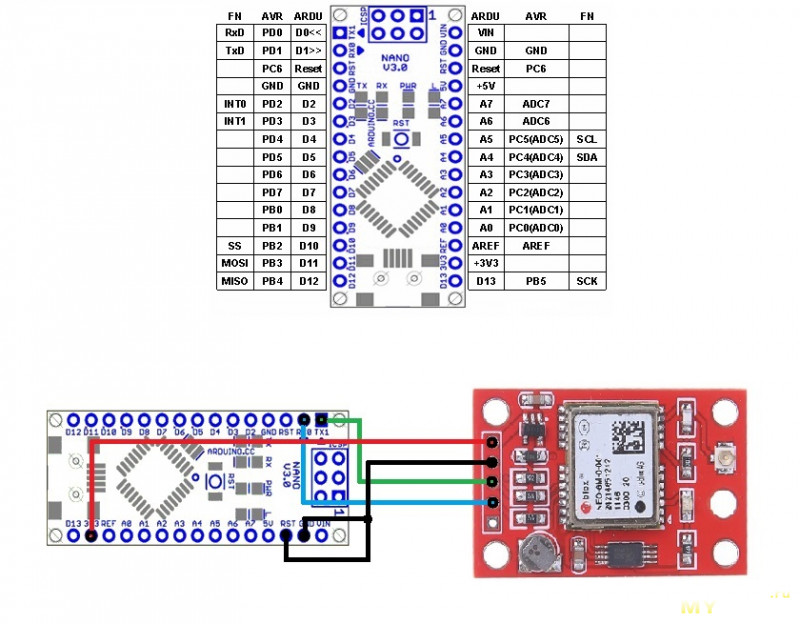
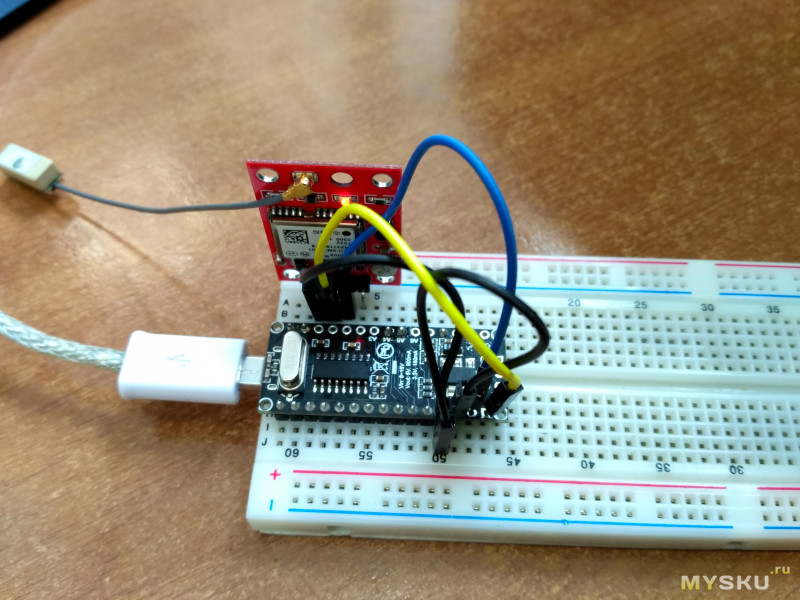
Выглядит примерно так:
Затем устанавливаем приложение U-center, ссылку давал выше, и выбираем порт:
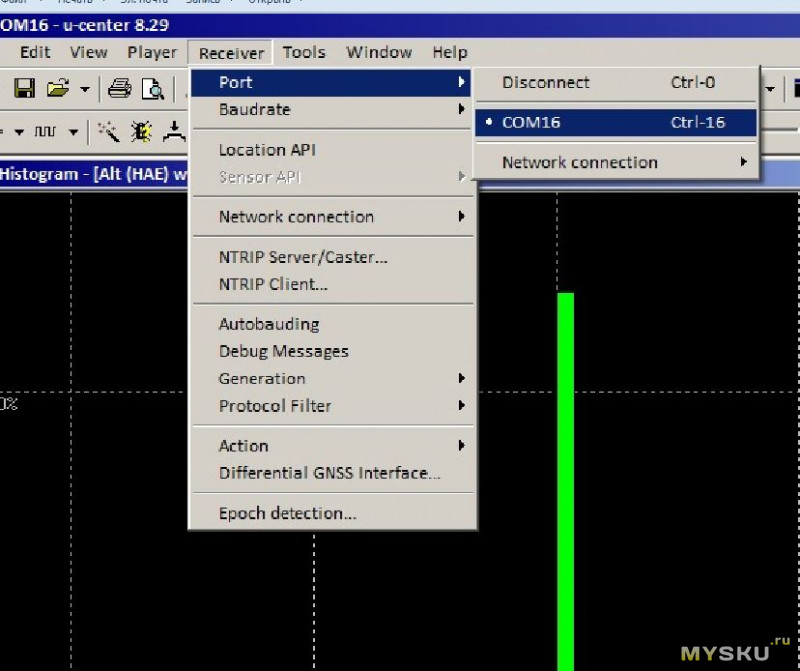
По умолчанию общаемся на 9600 бод.
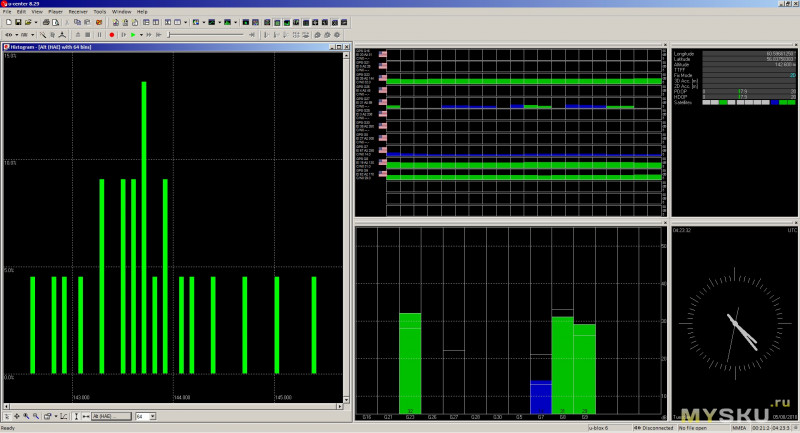
Вот в целом работает, все что поймал в помещении:
Подключение модуля к Arduino
Подготовим программатор для прошивки:
Затем в Нано зашиваем этот скетч:
Дополнительная информация
// ArduinoISP
// Copyright © 2008-2011 Randall Bohn
// If you require a license, see
// http://www.opensource.org/licenses/bsd-license.php
//
// This sketch turns the Arduino into a AVRISP using the following Arduino pins:
//
// Pin 10 is used to reset the target microcontroller.
//
// By default, the hardware SPI pins MISO, MOSI and SCK are used to communicate
// with the target. On all Arduinos, these pins can be found
// on the ICSP/SPI header:
//
// MISO °. . 5V (!) Avoid this pin on Due, Zero...
// SCK . . MOSI
// . . GND
//
// On some Arduinos (Uno,...), pins MOSI, MISO and SCK are the same pins as
// digital pin 11, 12 and 13, respectively. That is why many tutorials instruct
// you to hook up the target to these pins. If you find this wiring more
// practical, have a define USE_OLD_STYLE_WIRING. This will work even when not
// using an Uno. (On an Uno this is not needed).
//
// Alternatively you can use any other digital pin by configuring
// software ('BitBanged') SPI and having appropriate defines for PIN_MOSI,
// PIN_MISO and PIN_SCK.
//
// IMPORTANT: When using an Arduino that is not 5V tolerant (Due, Zero, ...) as
// the programmer, make sure to not expose any of the programmer's pins to 5V.
// A simple way to accomplish this is to power the complete system (programmer
// and target) at 3V3.
//
// Put an LED (with resistor) on the following pins:
// 9: Heartbeat - shows the programmer is running
// 8: Error - Lights up if something goes wrong (use red if that makes sense)
// 7: Programming - In communication with the slave
//
#include "Arduino.h"
#undef SERIAL
#define PROG_FLICKER true
// Configure SPI clock (in Hz).
// E.g. for an ATtiny @ 128 kHz: the datasheet states that both the high and low
// SPI clock pulse must be > 2 CPU cycles, so take 3 cycles i.e. divide target
// f_cpu by 6:
// #define SPI_CLOCK (128000/6)
//
// A clock slow enough for an ATtiny85 @ 1 MHz, is a reasonable default:
#define SPI_CLOCK (1000000/6)
// Select hardware or software SPI, depending on SPI clock.
// Currently only for AVR, for other architectures (Due, Zero,...), hardware SPI
// is probably too fast anyway.
#if defined(ARDUINO_ARCH_AVR)
#if SPI_CLOCK > (F_CPU / 128)
#define USE_HARDWARE_SPI
#endif
#endif
// Configure which pins to use:
// The standard pin configuration.
#ifndef ARDUINO_HOODLOADER2
#define RESET 10 // Use pin 10 to reset the target rather than SS
#define LED_HB 9
#define LED_ERR 8
#define LED_PMODE 7
// Uncomment following line to use the old Uno style wiring
// (using pin 11, 12 and 13 instead of the SPI header) on Leonardo, Due...
// #define USE_OLD_STYLE_WIRING
#ifdef USE_OLD_STYLE_WIRING
#define PIN_MOSI 11
#define PIN_MISO 12
#define PIN_SCK 13
#endif
// HOODLOADER2 means running sketches on the ATmega16U2 serial converter chips
// on Uno or Mega boards. We must use pins that are broken out:
#else
#define RESET 4
#define LED_HB 7
#define LED_ERR 6
#define LED_PMODE 5
#endif
// By default, use hardware SPI pins:
#ifndef PIN_MOSI
#define PIN_MOSI MOSI
#endif
#ifndef PIN_MISO
#define PIN_MISO MISO
#endif
#ifndef PIN_SCK
#define PIN_SCK SCK
#endif
// Force bitbanged SPI if not using the hardware SPI pins:
#if (PIN_MISO != MISO) || (PIN_MOSI != MOSI) || (PIN_SCK != SCK)
#undef USE_HARDWARE_SPI
#endif
// Configure the serial port to use.
//
// Prefer the USB virtual serial port (aka. native USB port), if the Arduino has one:
// - it does not autoreset (except for the magic baud rate of 1200).
// - it is more reliable because of USB handshaking.
//
// Leonardo and similar have an USB virtual serial port: 'Serial'.
// Due and Zero have an USB virtual serial port: 'SerialUSB'.
//
// On the Due and Zero, 'Serial' can be used too, provided you disable autoreset.
// To use 'Serial': #define SERIAL Serial
#ifdef SERIAL_PORT_USBVIRTUAL
#define SERIAL SERIAL_PORT_USBVIRTUAL
#else
#define SERIAL Serial
#endif
// Configure the baud rate:
#define BAUDRATE 19200
// #define BAUDRATE 115200
// #define BAUDRATE 1000000
#define HWVER 2
#define SWMAJ 1
#define SWMIN 18
// STK Definitions
#define STK_OK 0x10
#define STK_FAILED 0x11
#define STK_UNKNOWN 0x12
#define STK_INSYNC 0x14
#define STK_NOSYNC 0x15
#define CRC_EOP 0x20 //ok it is a space...
void pulse(int pin, int times);
#ifdef USE_HARDWARE_SPI
#include "SPI.h"
#else
#define SPI_MODE0 0x00
class SPISettings {
public:
// clock is in Hz
SPISettings(uint32_t clock, uint8_t bitOrder, uint8_t dataMode) : clock(clock) {
(void) bitOrder;
(void) dataMode;
};
private:
uint32_t clock;
friend class BitBangedSPI;
};
class BitBangedSPI {
public:
void begin() {
digitalWrite(PIN_SCK, LOW);
digitalWrite(PIN_MOSI, LOW);
pinMode(PIN_SCK, OUTPUT);
pinMode(PIN_MOSI, OUTPUT);
pinMode(PIN_MISO, INPUT);
}
void beginTransaction(SPISettings settings) {
pulseWidth = (500000 + settings.clock - 1) / settings.clock;
if (pulseWidth == 0)
pulseWidth = 1;
}
void end() {}
uint8_t transfer (uint8_t b) {
for (unsigned int i = 0; i < 8; ++i) {
digitalWrite(PIN_MOSI, (b & 0x80) ? HIGH : LOW);
digitalWrite(PIN_SCK, HIGH);
delayMicroseconds(pulseWidth);
b = (b << 1) | digitalRead(PIN_MISO);
digitalWrite(PIN_SCK, LOW); // slow pulse
delayMicroseconds(pulseWidth);
}
return b;
}
private:
unsigned long pulseWidth; // in microseconds
};
static BitBangedSPI SPI;
#endif
void setup() {
SERIAL.begin(BAUDRATE);
pinMode(LED_PMODE, OUTPUT);
pulse(LED_PMODE, 2);
pinMode(LED_ERR, OUTPUT);
pulse(LED_ERR, 2);
pinMode(LED_HB, OUTPUT);
pulse(LED_HB, 2);
}
int error = 0;
int pmode = 0;
// address for reading and writing, set by 'U' command
unsigned int here;
uint8_t buff[256]; // global block storage
#define beget16(addr) (*addr * 256 + *(addr+1) )
typedef struct param {
uint8_t devicecode;
uint8_t revision;
uint8_t progtype;
uint8_t parmode;
uint8_t polling;
uint8_t selftimed;
uint8_t lockbytes;
uint8_t fusebytes;
uint8_t flashpoll;
uint16_t eeprompoll;
uint16_t pagesize;
uint16_t eepromsize;
uint32_t flashsize;
}
parameter;
parameter param;
// this provides a heartbeat on pin 9, so you can tell the software is running.
uint8_t hbval = 128;
int8_t hbdelta = 8;
void heartbeat() {
static unsigned long last_time = 0;
unsigned long now = millis();
if ((now - last_time) < 40)
return;
last_time = now;
if (hbval > 192) hbdelta = -hbdelta;
if (hbval < 32) hbdelta = -hbdelta;
hbval += hbdelta;
analogWrite(LED_HB, hbval);
}
static bool rst_active_high;
void reset_target(bool reset) {
digitalWrite(RESET, ((reset && rst_active_high) || (!reset && !rst_active_high)) ? HIGH : LOW);
}
void loop(void) {
// is pmode active?
if (pmode) {
digitalWrite(LED_PMODE, HIGH);
} else {
digitalWrite(LED_PMODE, LOW);
}
// is there an error?
if (error) {
digitalWrite(LED_ERR, HIGH);
} else {
digitalWrite(LED_ERR, LOW);
}
// light the heartbeat LED
heartbeat();
if (SERIAL.available()) {
avrisp();
}
}
uint8_t getch() {
while (!SERIAL.available());
return SERIAL.read();
}
void fill(int n) {
for (int x = 0; x < n; x++) {
buff[x] = getch();
}
}
#define PTIME 30
void pulse(int pin, int times) {
do {
digitalWrite(pin, HIGH);
delay(PTIME);
digitalWrite(pin, LOW);
delay(PTIME);
} while (times--);
}
void prog_lamp(int state) {
if (PROG_FLICKER) {
digitalWrite(LED_PMODE, state);
}
}
uint8_t spi_transaction(uint8_t a, uint8_t b, uint8_t c, uint8_t d) {
SPI.transfer(a);
SPI.transfer(b);
SPI.transfer©;
return SPI.transfer(d);
}
void empty_reply() {
if (CRC_EOP == getch()) {
SERIAL.print((char)STK_INSYNC);
SERIAL.print((char)STK_OK);
} else {
error++;
SERIAL.print((char)STK_NOSYNC);
}
}
void breply(uint8_t b) {
if (CRC_EOP == getch()) {
SERIAL.print((char)STK_INSYNC);
SERIAL.print((char)b);
SERIAL.print((char)STK_OK);
} else {
error++;
SERIAL.print((char)STK_NOSYNC);
}
}
void get_version(uint8_t c) {
switch © {
case 0x80:
breply(HWVER);
break;
case 0x81:
breply(SWMAJ);
break;
case 0x82:
breply(SWMIN);
break;
case 0x93:
breply('S'); // serial programmer
break;
default:
breply(0);
}
}
void set_parameters() {
// call this after reading parameter packet into buff[]
param.devicecode = buff[0];
param.revision = buff[1];
param.progtype = buff[2];
param.parmode = buff[3];
param.polling = buff[4];
param.selftimed = buff[5];
param.lockbytes = buff[6];
param.fusebytes = buff[7];
param.flashpoll = buff[8];
// ignore buff[9] (= buff[8])
// following are 16 bits (big endian)
param.eeprompoll = beget16(&buff[10]);
param.pagesize = beget16(&buff[12]);
param.eepromsize = beget16(&buff[14]);
// 32 bits flashsize (big endian)
param.flashsize = buff[16] * 0x01000000
+ buff[17] * 0x00010000
+ buff[18] * 0x00000100
+ buff[19];
// AVR devices have active low reset, AT89Sx are active high
rst_active_high = (param.devicecode >= 0xe0);
}
void start_pmode() {
// Reset target before driving PIN_SCK or PIN_MOSI
// SPI.begin() will configure SS as output, so SPI master mode is selected.
// We have defined RESET as pin 10, which for many Arduinos is not the SS pin.
// So we have to configure RESET as output here,
// (reset_target() first sets the correct level)
reset_target(true);
pinMode(RESET, OUTPUT);
SPI.begin();
SPI.beginTransaction(SPISettings(SPI_CLOCK, MSBFIRST, SPI_MODE0));
// See AVR datasheets, chapter "SERIAL_PRG Programming Algorithm":
// Pulse RESET after PIN_SCK is low:
digitalWrite(PIN_SCK, LOW);
delay(20); // discharge PIN_SCK, value arbitrarily chosen
reset_target(false);
// Pulse must be minimum 2 target CPU clock cycles so 100 usec is ok for CPU
// speeds above 20 KHz
delayMicroseconds(100);
reset_target(true);
// Send the enable programming command:
delay(50); // datasheet: must be > 20 msec
spi_transaction(0xAC, 0x53, 0x00, 0x00);
pmode = 1;
}
void end_pmode() {
SPI.end();
// We're about to take the target out of reset so configure SPI pins as input
pinMode(PIN_MOSI, INPUT);
pinMode(PIN_SCK, INPUT);
reset_target(false);
pinMode(RESET, INPUT);
pmode = 0;
}
void universal() {
uint8_t ch;
fill(4);
ch = spi_transaction(buff[0], buff[1], buff[2], buff[3]);
breply(ch);
}
void flash(uint8_t hilo, unsigned int addr, uint8_t data) {
spi_transaction(0x40 + 8 * hilo,
addr >> 8 & 0xFF,
addr & 0xFF,
data);
}
void commit(unsigned int addr) {
if (PROG_FLICKER) {
prog_lamp(LOW);
}
spi_transaction(0x4C, (addr >> 8) & 0xFF, addr & 0xFF, 0);
if (PROG_FLICKER) {
delay(PTIME);
prog_lamp(HIGH);
}
}
unsigned int current_page() {
if (param.pagesize == 32) {
return here & 0xFFFFFFF0;
}
if (param.pagesize == 64) {
return here & 0xFFFFFFE0;
}
if (param.pagesize == 128) {
return here & 0xFFFFFFC0;
}
if (param.pagesize == 256) {
return here & 0xFFFFFF80;
}
return here;
}
void write_flash(int length) {
fill(length);
if (CRC_EOP == getch()) {
SERIAL.print((char) STK_INSYNC);
SERIAL.print((char) write_flash_pages(length));
} else {
error++;
SERIAL.print((char) STK_NOSYNC);
}
}
uint8_t write_flash_pages(int length) {
int x = 0;
unsigned int page = current_page();
while (x < length) {
if (page != current_page()) {
commit(page);
page = current_page();
}
flash(LOW, here, buff[x++]);
flash(HIGH, here, buff[x++]);
here++;
}
commit(page);
return STK_OK;
}
#define EECHUNK (32)
uint8_t write_eeprom(unsigned int length) {
// here is a word address, get the byte address
unsigned int start = here * 2;
unsigned int remaining = length;
if (length > param.eepromsize) {
error++;
return STK_FAILED;
}
while (remaining > EECHUNK) {
write_eeprom_chunk(start, EECHUNK);
start += EECHUNK;
remaining -= EECHUNK;
}
write_eeprom_chunk(start, remaining);
return STK_OK;
}
// write (length) bytes, (start) is a byte address
uint8_t write_eeprom_chunk(unsigned int start, unsigned int length) {
// this writes byte-by-byte, page writing may be faster (4 bytes at a time)
fill(length);
prog_lamp(LOW);
for (unsigned int x = 0; x < length; x++) {
unsigned int addr = start + x;
spi_transaction(0xC0, (addr >> 8) & 0xFF, addr & 0xFF, buff[x]);
delay(45);
}
prog_lamp(HIGH);
return STK_OK;
}
void program_page() {
char result = (char) STK_FAILED;
unsigned int length = 256 * getch();
length += getch();
char memtype = getch();
// flash memory @here, (length) bytes
if (memtype == 'F') {
write_flash(length);
return;
}
if (memtype == 'E') {
result = (char)write_eeprom(length);
if (CRC_EOP == getch()) {
SERIAL.print((char) STK_INSYNC);
SERIAL.print(result);
} else {
error++;
SERIAL.print((char) STK_NOSYNC);
}
return;
}
SERIAL.print((char)STK_FAILED);
return;
}
uint8_t flash_read(uint8_t hilo, unsigned int addr) {
return spi_transaction(0x20 + hilo * 8,
(addr >> 8) & 0xFF,
addr & 0xFF,
0);
}
char flash_read_page(int length) {
for (int x = 0; x < length; x += 2) {
uint8_t low = flash_read(LOW, here);
SERIAL.print((char) low);
uint8_t high = flash_read(HIGH, here);
SERIAL.print((char) high);
here++;
}
return STK_OK;
}
char eeprom_read_page(int length) {
// here again we have a word address
int start = here * 2;
for (int x = 0; x < length; x++) {
int addr = start + x;
uint8_t ee = spi_transaction(0xA0, (addr >> 8) & 0xFF, addr & 0xFF, 0xFF);
SERIAL.print((char) ee);
}
return STK_OK;
}
void read_page() {
char result = (char)STK_FAILED;
int length = 256 * getch();
length += getch();
char memtype = getch();
if (CRC_EOP != getch()) {
error++;
SERIAL.print((char) STK_NOSYNC);
return;
}
SERIAL.print((char) STK_INSYNC);
if (memtype == 'F') result = flash_read_page(length);
if (memtype == 'E') result = eeprom_read_page(length);
SERIAL.print(result);
}
void read_signature() {
if (CRC_EOP != getch()) {
error++;
SERIAL.print((char) STK_NOSYNC);
return;
}
SERIAL.print((char) STK_INSYNC);
uint8_t high = spi_transaction(0x30, 0x00, 0x00, 0x00);
SERIAL.print((char) high);
uint8_t middle = spi_transaction(0x30, 0x00, 0x01, 0x00);
SERIAL.print((char) middle);
uint8_t low = spi_transaction(0x30, 0x00, 0x02, 0x00);
SERIAL.print((char) low);
SERIAL.print((char) STK_OK);
}
//////////////////////////////////////////
//////////////////////////////////////////
////////////////////////////////////
////////////////////////////////////
void avrisp() {
uint8_t ch = getch();
switch (ch) {
case '0': // signon
error = 0;
empty_reply();
break;
case '1':
if (getch() == CRC_EOP) {
SERIAL.print((char) STK_INSYNC);
SERIAL.print("AVR ISP");
SERIAL.print((char) STK_OK);
}
else {
error++;
SERIAL.print((char) STK_NOSYNC);
}
break;
case 'A':
get_version(getch());
break;
case 'B':
fill(20);
set_parameters();
empty_reply();
break;
case 'E': // extended parameters - ignore for now
fill(5);
empty_reply();
break;
case 'P':
if (!pmode)
start_pmode();
empty_reply();
break;
case 'U': // set address (word)
here = getch();
here += 256 * getch();
empty_reply();
break;
case 0x60: //STK_PROG_FLASH
getch(); // low addr
getch(); // high addr
empty_reply();
break;
case 0x61: //STK_PROG_DATA
getch(); // data
empty_reply();
break;
case 0x64: //STK_PROG_PAGE
program_page();
break;
case 0x74: //STK_READ_PAGE 't'
read_page();
break;
case 'V': //0x56
universal();
break;
case 'Q': //0x51
error = 0;
end_pmode();
empty_reply();
break;
case 0x75: //STK_READ_SIGN 'u'
read_signature();
break;
// expecting a command, not CRC_EOP
// this is how we can get back in sync
case CRC_EOP:
error++;
SERIAL.print((char) STK_NOSYNC);
break;
// anything else we will return STK_UNKNOWN
default:
error++;
if (CRC_EOP == getch())
SERIAL.print((char)STK_UNKNOWN);
else
SERIAL.print((char)STK_NOSYNC);
}
}
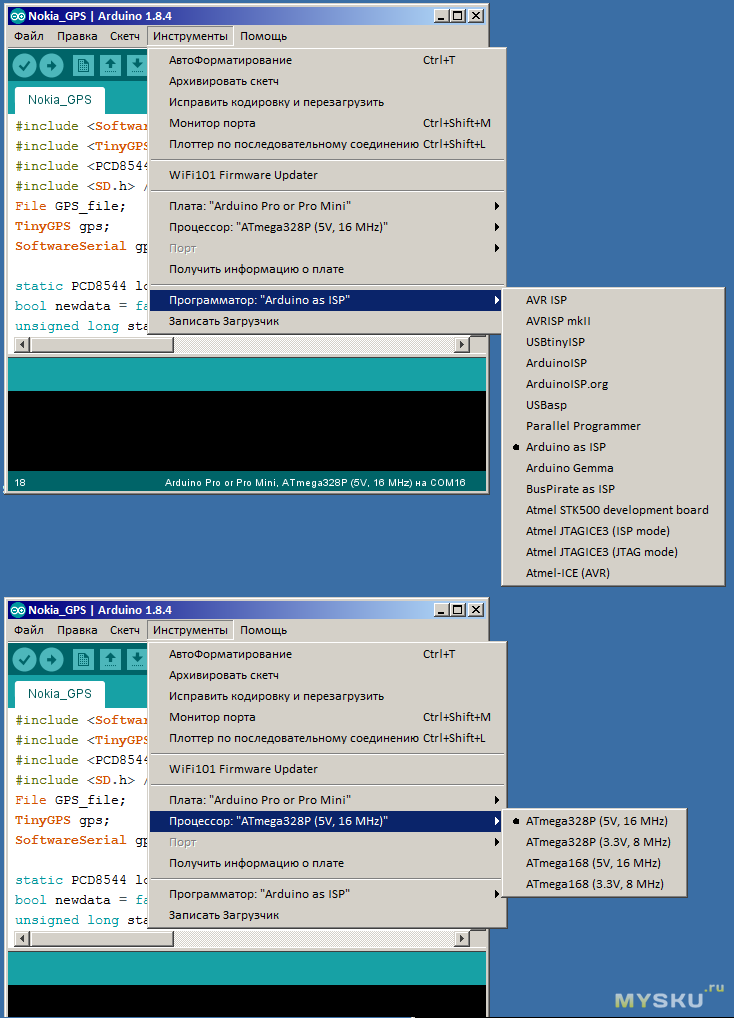
После этого выбираем Ваш контроллер Pro Mini, указываем программатор ArduinoISP и шьем контроллер, используя команду
Скетч -> Загрузить через программатор и нажимаем кнопку Reset на Pro mini, пойдет прошивка контроллера (у меня проходит только со второй попытки, нужно набраться терпения):
Как выше говорил, я очень люблю ко всяким гаджетам подвязывать дисплеи, ну просто жуть как, поэтому данный
«проект» мое желание не обошло стороной.
Что нам для всего этого потребуется:
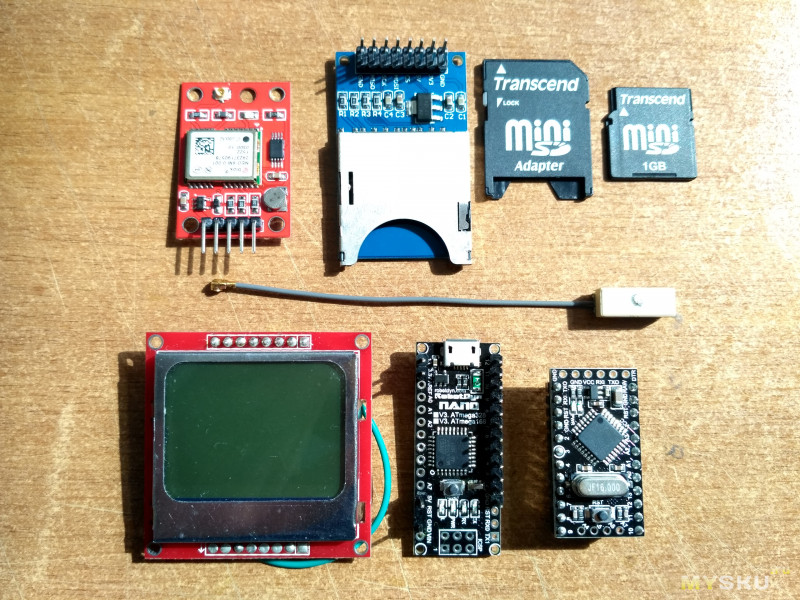
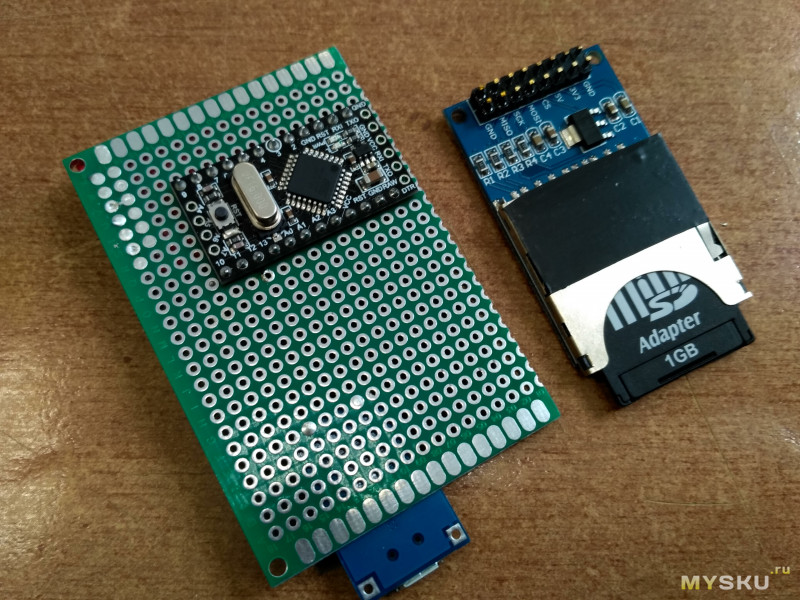
В общем, собрал весь хлам, который валялся без дела:
1. SD card module, очень огромный, поэтому я старался как можно скорее избавится от него.
2. Дисплей на базе контроллера PCD8544, всем известный нокиа дисплей.
3. Карта памяти на 1Гб, с не популярным стандартом MiniSD, вообще был без идеи куда ее воткнуть, а хочется все пустить в дело, вот и пускай поработает на благо навигации.
4. Потребуется мозг, большой такой мозг Pro Mini на чипе 328P.
Как писал выше, будем шить через Arduino Nano с прошитым в нее загрузчиком.
Вообще я очень старался засунуть весь проект в нано, ну просто очень. Не получается, либо отказываемся от карты памяти, либо от дисплея.
5. Конечно же, сам модуль + антенна, как писал выше можно изготовить самому.
6. Ах да, чуть не забыл, потребуется еще корпус иначе, что за устройство без корпуса.

В качестве корпуса были закуплены, еще раз
те самые коробки, но в серебряном виде, на пробу. Скажу так, мне абсолютно не понравился серебряный цвет, черный смотрится лучше.
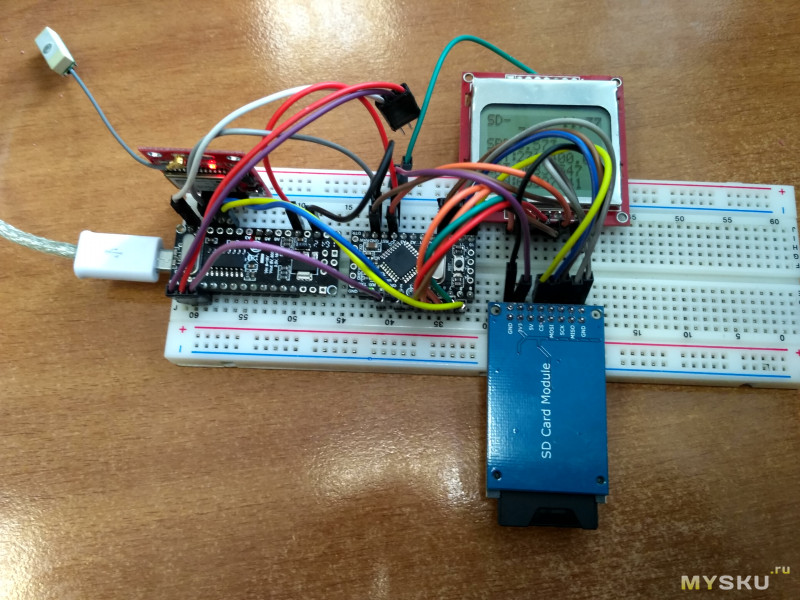
Когда все комплектующие есть в наличии, можно все это подключить и запрограммировать.
Подключаем к Pro Mini по следующей схеме:
Дисплей:
RST — D6
CE — D7
DC — D5
DIN — D4
CLK — D3
VCC — 5V (опционально в моем случае, в остальных 3.3В )
Light — GND
GND — GND
Подсветка мне была не нужна, и я не стал ее подключать.
SD карта:
CS-D10
MOSI-D11
MISO-D12
SCK-D13
GND — GND
5V — VCC (опционально в моем случае, в некоторых при наличии преобразователя подключаем на 3.3В)
GPS модуль:
RX-D8
TX-D2
GND — GND
VCC-3.3 (3.3 это предел!)
Не забываем подключать антенну на модуль, питание я брал с Нано тк. была подключена для отладки, далее все будет переделано на аккумулятор.
Примерный вид:
Код прост и незамысловат, для использования Вам понадобится, пожалуй
самая легкая библиотека для дисплея. Далее
библиотека для GPS. Остальные являются встроенными. По коду, строка — time*0.000001+5, по сути я привел время в удобоваримый вид и добавил часовой пояс. Можно этого не делать и получать чистые результаты.
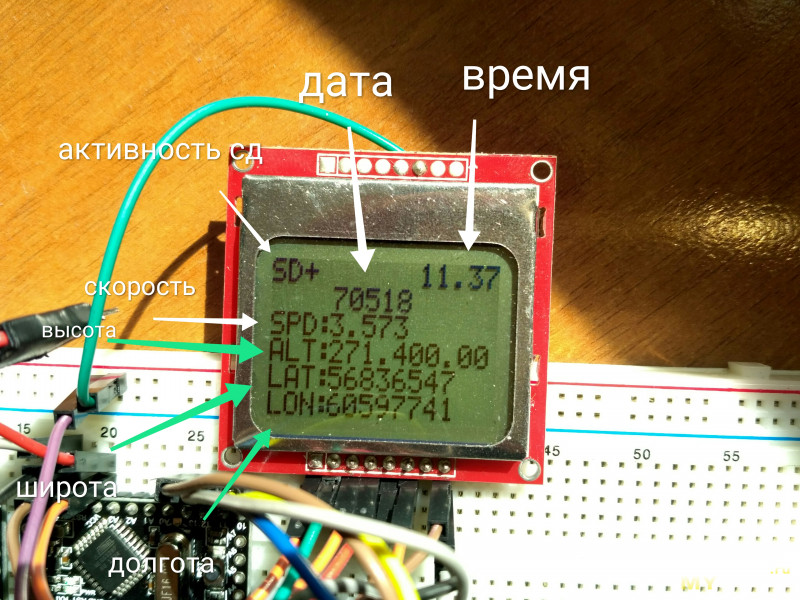
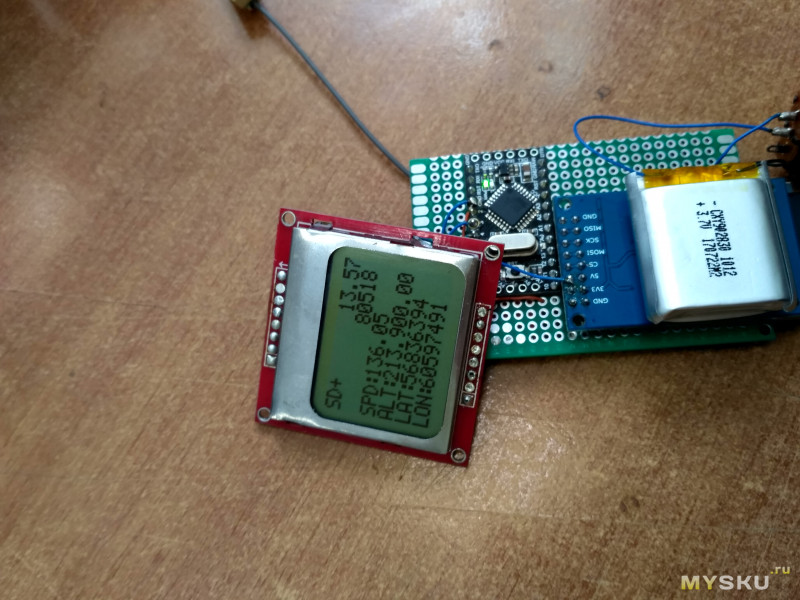
Ещё один нюанс по библиотеке дисплея заключается в следующем у дисплея, включая с нулевой строкой, всего влезет 6 строк. Что довольно мало, поэтому нужно сразу решать, какую информацию выводить, что-то придется выводить символами, экономя место. Дисплей перерисовывается каждую секунду, при этом обновляя и записывая информацию, поступающую со спутников.
При ошибке чтения файла или отсутствия доступа до карты SD будет выводиться сообщение
SD-, в остальных случаях
SD+.
Скетч
#include <SoftwareSerial.h>
#include <TinyGPS.h>
#include <PCD8544.h>
#include <SD.h> //CS-D10, MOSI-D11, MISO-D12, SCK-D13, GND — GND, 5V — VCC (опционально в моем случае, в некоторых при отсутствии преобразователя подключаем на 3.3В)
File GPS_file;
TinyGPS gps;
SoftwareSerial gpsSerial(2, 8);//RX - 8 pin, TX - 2 pin
static PCD8544 lcd; //RST - D6, CE - D7, DC - D5, DIN - D4, CLK - D3, VCC - 5V (опционально, при наличии преобразователя на 3.3В линии), Light - GND, GND - GND
bool newdata = false;
unsigned long start;
long lat, lon;
unsigned long time, date;
void setup() {
lcd.begin(84, 48);
gpsSerial.begin(9600);
Serial.begin(9600);
pinMode(10, OUTPUT);
if (!SD.begin(10)){
lcd.setCursor(0, 0);
lcd.println("SD-");
return;}
lcd.setCursor(0, 0);
lcd.println("SD+");
GPS_file = SD.open("GPSLOG.txt", FILE_WRITE);
if (GPS_file){
Serial.print("Writing to test.txt...");
GPS_file.print("LATITUDE");
GPS_file.print(",");
GPS_file.print("LONGITUDE");
GPS_file.print(",");
GPS_file.print("DATE");
GPS_file.print(",");
GPS_file.print("TIME");
GPS_file.print(",");
GPS_file.print("ALTITUDE");
GPS_file.println();
GPS_file.close();
Serial.println("done.");
}else{
Serial.println("error opening test.txt");
}
lcd.setCursor(0,3);
lcd.print("ALT: ");
lcd.setCursor(0,2);
lcd.print("SPD: ");
lcd.setCursor(0,4);
lcd.print("LAT: ");
lcd.setCursor(0,5);
lcd.print("LON: ");
}
void loop() {
if (millis() - start > 1000){
newdata = readgps();
if (newdata){
start = millis();
gps.get_position(&lat, &lon);
gps.get_datetime(&date, &time);
lcd.setCursor(50,1);
lcd.print(date);
lcd.setCursor(55,0);
lcd.print(time*0.000001+5);
lcd.setCursor(22, 4);
lcd.print(lat);
lcd.setCursor(22, 5);
lcd.print(lon);
lcd.setCursor(22, 2);
lcd.print(gps.f_speed_kmph());
lcd.setCursor(22, 3);
lcd.print(gps.f_altitude());
}
}
GPS_file = SD.open("GPSLOG.txt", FILE_WRITE);
if(GPS_file){
GPS_file.print(lat);
GPS_file.print(",");
GPS_file.print(lon);
GPS_file.print(",");
GPS_file.print(date);
GPS_file.print(",");
GPS_file.print(time*0.000001+5);
GPS_file.print(",");
GPS_file.print(gps.f_altitude());
GPS_file.println();
GPS_file.close();
}else{
lcd.setCursor(0, 0);
lcd.println("SD-");
}
}
bool readgps(){
while (gpsSerial.available()){
int b = gpsSerial.read();
if('\r' != b){
if (gps.encode(b))
return true;}}
return false;}
После прошивки Вы увидите нечто подобное (в скетче вывод даты отредактирован к правому краю под временем):
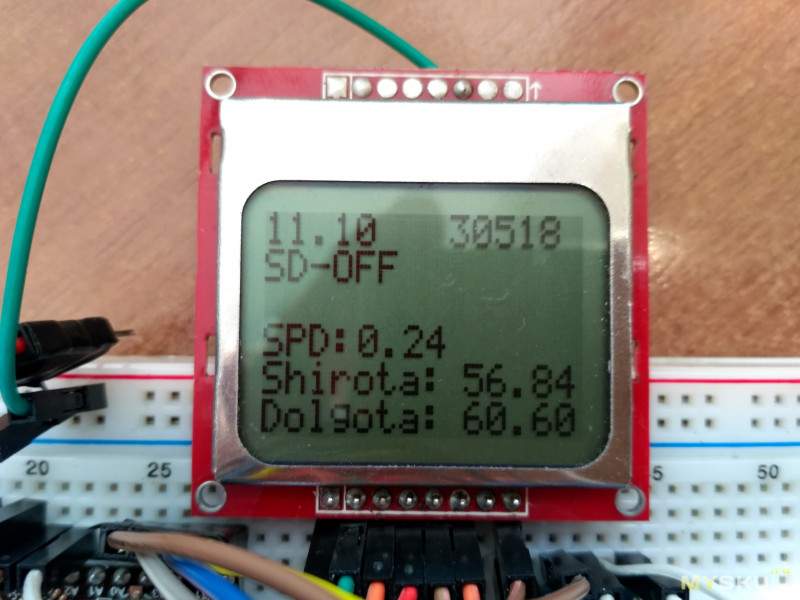
С расположением элементов можно поиграться, был такой вариант, но понял, что усреднение координат выдает огромную погрешность и отказался.
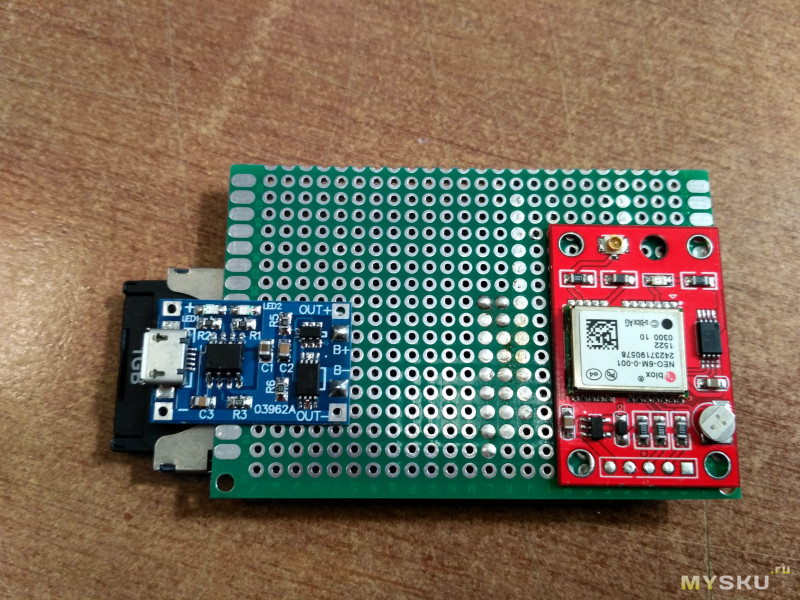
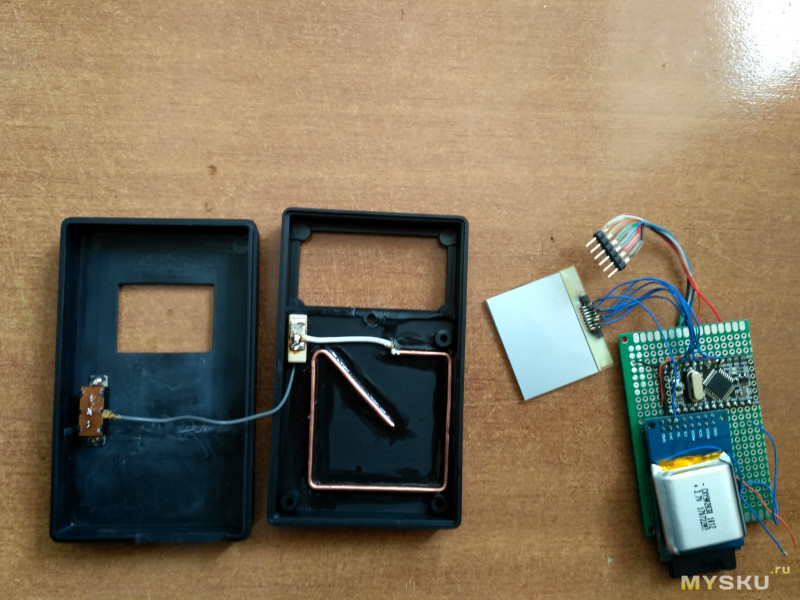
Что делать дальше? Собирать в корпус, можно на клей, можно на двухсторонний скотч все разместить, мне же захотелось все разместить на макетной плате:
В качестве элементов питания я использую LI-ion аккумулятор. Покупаю акб для экшн — камер оптом и использую их в своих поделках + ко всему всегда могут пригодиться для экшн — камеры, которой пользуюсь в походах.
Покупал тут.

Далее идет борьба за место, отрезаем лишнее от контактов и ровняем их с высотой макетной платы.
Используя макетную плату, собираем все воедино:
На корпус для карты памяти наклеил кусок изоленты, тк он соприкасается с контактами зарядника для батареи. Карту памяти прошиваем в FAT16.


Потом запускаем и проверяем, не забыв поставить выключатель:



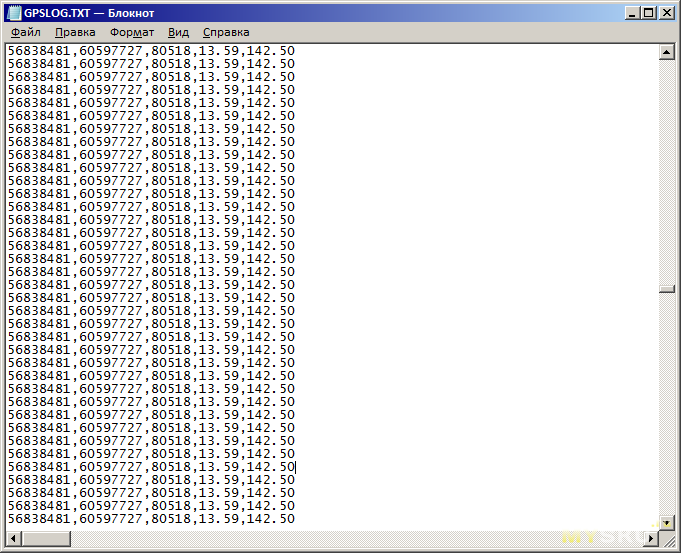
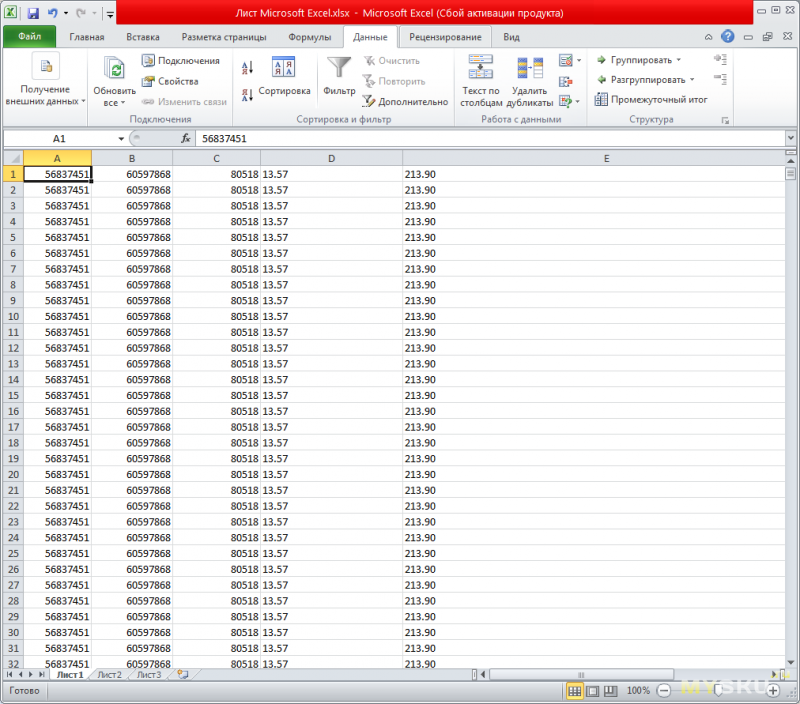
Обработка результатов
Результаты представляются в виде текстового файла:
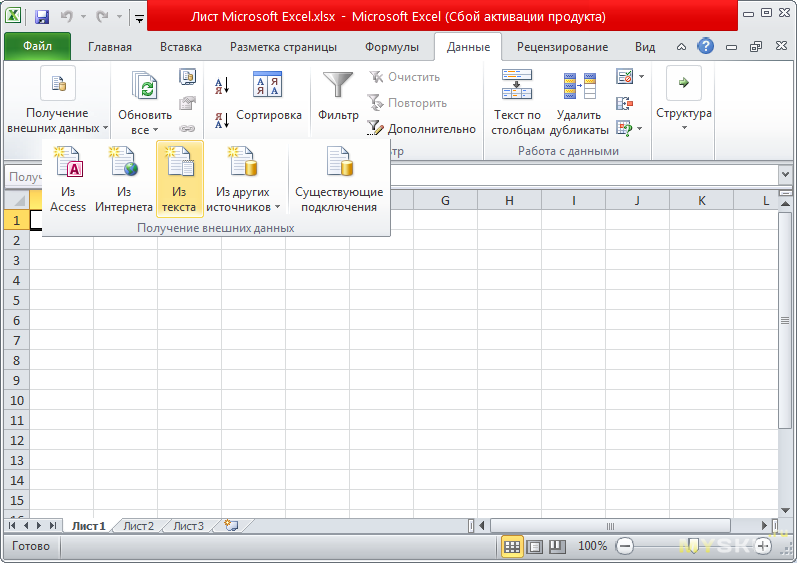
Далее полученные данные загоним в эксель:
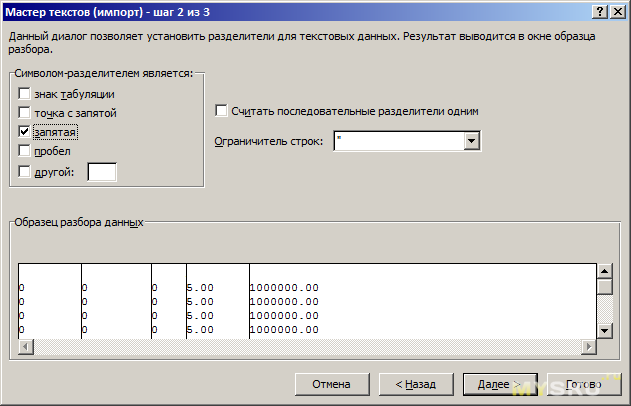
Разделитель колонок выставляем — запятая:
Готово:
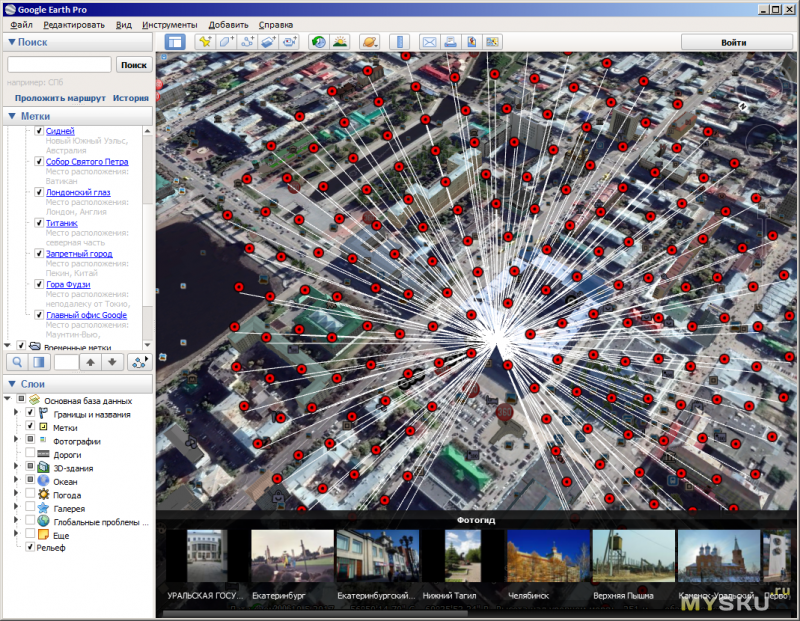
Далее можно загрузить все это дело в ПО Google Earth Pro, используя вкладку
Файл -> Открыть, открываем наш файлик и выбираем столбцы, отвечающие за широту и долготу и получаем похожий трек (тк я был в одном месте, то получил россыпь точек):
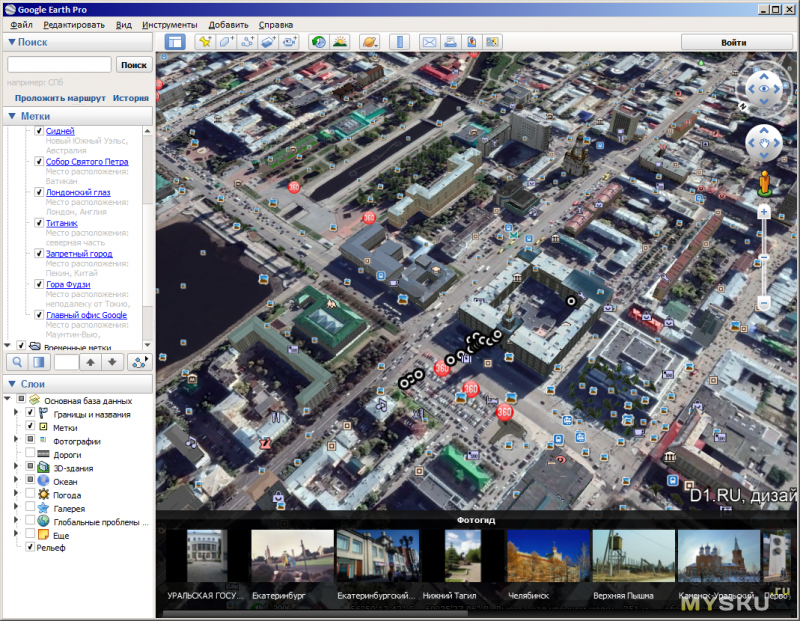
Можно выбрать точку и отобразить все количество точек, которые ей соответсвуют:
Итог
В общем логер работает, писать трек можно, с последующим редактированием на карте. Так же в программном обеспечении от гугла, трек можно сохранить в более популярном формате, которые поддерживают другие карты.
Свое любопытство удовлетворил с лихвой.
Из минусов это маленькая антенна, порой холодный старт затягивается до 10 минут (зависит от того, насколько сильна облачность, время суток). Антенну конечно можно заменить, на самодельную, либо докупить, на али довольно много активных антенн.
Спасибо за потраченное время.
Обновление от 22.05.18
1. Заменил корпус и изготовил антенну из представленной мною ссылке. (Уменьшил время холодного старта, быстрее находит спутники, значительно быстрее.)
2. Вынес разъем дебага наружу (поигравшись, буду писать прошивку поинтереснее, выкладывать буду сюда же)
3. Для уменьшения занимаемого места, разобрал дисплей и подпаялся к нему.

Пока вид такой.

Нормально написанные программы ещё и карту успевают отображать и не тормозить.
Не жалуется. Есть несколько обзоров здесь
Вряд ли так каждому повезёт.
Когда материалы попадают к правоохранителям, они проводят экспертизу, рассказывает управляющий партнер адвокатского бюро «ЗКС» Денис Саушкин:
Денис Саушкин, управляющий партнер адвокатского бюро: «ЗКС» «Техническая экспертиза, как правило, очень проста. Устанавливается просто, имеется ли возможность скрытого записывания и скрытой передачи информации. Самое неприятное в этой ситуации, что суды по данным делам выносят обвинительные приговоры. Позиция, что будут знать его сотрудники о том, что у них эти трекеры, не исключает его ответственности в рамках уголовного закона. Есть такие казусы, что возбуждаются уголовные дела даже на пастухов, которые трекеры ставили на своих коров».
Эта шпионская статья появилась в нашем Уголовном кодексе семь лет назад. В 2012 году по ней судили 72 человек, а в прошлом году — уже 254, причем ни одного не оправдали.
Кто-то отделался штрафами, а кто-то получил реальные сроки: максимальное наказание по статье — до четырех лет тюрьмы. Правда, как пишет «Коммерсантъ», Генпрокуратура провела масштабную проверку этих дел.
Теперь закон могут скорректировать. Когда это произойдет, пока не известно. Сейчас следователи решают, возбуждать ли против Артема Лаптева дело или нет. Сам он опасается, что может на пустом месте получить судимость. Получается, за то, что хотел цифровизовать свой бизнес. Об этом сообщает Рамблер.
Или вы живёте всё время честно, и дорогу никогда на красный свет не переходили (даже, когда не было машин)? :)
жрать кактусвыбирать тех же…Сидят там %%%%%% конченые и придумывают такие %%%% законы.
))
Если это ГУ Калина/Приора то отлично подойдет u-blox VK-172. (Если не ошибаюсь то на Win CE подойдет отлично)
Если это ГУ на андроиде то надо искать то, к чему есть драйвера на андроиде (завести u-blox VK-172 вроде как тоже можно, но с большим геморроем)
P.S. или Вам просто в машину бросить не подключая к ГУ?
P.S. Я бы побоялся такие устройства заказывать с Али, если Вы конечно из России)
Могу конечно ошибаться, несколько лет назад увлекался сборкой carPC и там была с этим проблема.
Работает отлично, проблема только с зарядкой при кратких поездках. Решил подключением зарядного модуля к лампе освещения салона, на которой 12В есть еще 30 минут после постановки на охрану.
Спасибо, было интересно почитать
С уважением, ФСБ.
https://www.znak.com/2017-11-21/zhitel_sela_poymannyy_fsb_s_gps_trekerom_kupil_ego_chtoby_sledit_za_telenkom
А если вместо признания писать«был пьян, что заказывал не помню, и на кой оно мне тогда было нужно не знаю» — и дела никакого не будет
2. в этот перечень легко засовывается смартфон или видеорегистратор, нужно только признание что приобретен с целью «негласного получения информации» и вуаля, обычный китайский сматрфон становится запрещенным к ввозу, а покупатель уголовником.
вот только преступника нужно НАЙТИ.
и доказать что именно Он заказал нужно признание.
иначе 0% что найдут заказ на Али, оплату заказа.
таким макаром ты своему «другу» можешь заказать ручку-микрофон и т.п.
и отправить его на нары! или тебя любой желающий! подумай об этом!
ЗЫ достаточно ФИО и адреса «друга»
негласно получать — для них все негласно что на батарейках.
мздоимцы и оборотни бздят что их поймают. плевать им на частную жизнь граждан
поэтому берите камеры Без Глазков, с отдельно Подключаемыми микрофонами и т.д.
ничего такого в сборе
У меня в машине стоит ЗАВОДСКОЙ ТРЕКЕР, машина сертифицирована к использованию на территории РФ. Более того, по Закону теперь каждый а/м обязан иметь при себе ГЛОНАСС, что по сути и есть трекер. Вопрос только сертифицирован или нет.
Да, это выше, чем neo6, но не настолько, чтобы ужас-ужас.
Зато сразу gps+глонасс+бэйдоу.
В любом случае, как я помню, во всех американских и европейских модулях (а u-blox — это Швейцария формально) «неродные» спутники используются только тогда, когда своих недостаточно для определения координат. Помнится, ещё в телефонах было это: ГЛОНАСС начинал сильно влиять на точность только тогда, когда «виделось» мало (недостаточно) спутников GPS (NAVSTAR), в противном случае — при большом числе «видимых» спутников GPS данные ГЛОНАСС (и других) не использовались, т. е. координаты (и точность) определялись только данными GPS (а ГЛОНАСС в тех условиях мог сильно прибавить точности).
Все всегда можно подредактировать и дошить, я думал туда еще магнитометр с гироскопом засунуть, но это совсем жирно было для контроллера, хотя хотел считать угол относительно гироскопа и высчитывать направление движения, электронный компасс, благо у дисплея еще одна строка оставалась не занятой.
Действительно, ценники на готовые GPS-треккера просто конские,а здесь и зарядка для ума, и забава для шаловливых ручонок!
Взял себе на заметку, мои наилучшие пожелания Автору обзора!
Конечно с компактностью беда. Вот эта штука покомпактнее будет ebay.com/itm/401348172392 Вообще, на модулях делать проще, но по факту нужна голая Мега и микроСД адаптер (не модуль), что поместится на пятачке.
Кстати, что там с потреблением, какой ток? И ещё, M8N поддерживает предзагрузку альманаха (может и этот). Правда на сайте Ublox надо регистрироваться и дождаться пока ключ пришлют. Грузится через U-center.
Экран по большому счёту не нужен такому устройству, цифры координат мало полезны, время можно и на часах посмотреть, разве что пройденный путь, ну так для этого такой экран избыточен. И да, полезнее было бы видеть оставшийся заряд батареи или её напряжение. Данные в таком виде тоже не особо применимы, проще и легче писать NMEA в файл, а потом на компе разобрать его.
Для двух- трехсистемных модулей (GPS, ГЛОНАСС, Beidou/Galileo) эта библиотека берет только данные GPS? Если да, то как-то не айс.
2. Экран это моя прихоть, можно сэкономить на потреблении убрав его.
3. Заряд батареи это можно дописать, сам уже об этом подумал.
4. Почему данные не применимы? Вполне можно использовать, после конвертации и строить маршрут.
5. Библиотека только для GPS (нужна была очень простая и легкая)
6. Не забывайте, что даже человек не подготовленный мог собрать это уст-во, по этому самый простяцкий вариант я показал.
(фото продавца).
Вот крупнее фрагмент:
Дальше что? Как Вы улучшите позиционирование с этими данными на микроконтроллере?
Так что толку от этих данных в нашем примере нет.
Вот сижу думаю, можно ли в магнитоле(android) впаять похожий модуль вместо вышедшего из строя ноунейма(затерли маркировку) без необходимости потом прописывать его в системе?
Но вот за программный код… Не сочтите за критику, но вот вам задел на будущее. (или тем, кто будет повторять).
По сути, это очень плохая практика.
Потому что в 23 часа по GMT вы у себя на месте получите магические 28 часов вечера.
Так низзя :)
Я по этим граблям уже ходил.
Поэтому надо честно разбирать часы, минуты и секунды, и често переводить всё под свой часовой пояс. Это значит, что если час перескакивает через 24, то прибавлять дату. Если, при этом, день перескакивает за количество дней в месяце, то прибавлять месяц, если месяц переходит за границу года, то прибавлять год. Причём, корректировать под любую часовую зону, как восточной, так и западной долготы (т.е. в обе стороны).
Ну и ввести переменную под часовую зону, а то половина читателей даже думать не станет, откуда у вас эти "+5" в формуле. :)
И, да, совершенно нет анализа корректности полученных данных, поэтому вместо точки на карте у вас «ёжик» и разброд. А для понимания корректности полученных данных в библиотеке есть переменная age. Задайтесь порогом корректности и просто отбрасывайте всё, что уже протухло (т.е. выходит за этот порог). Данных будет меньше, но они будут точные.
Я делал обзор самодельных часов, получающих время с GPS. Все желающие из исходников могут надёргать нужные куски кода, «всё уже украдено до нас» ©.
Надо измерялку на других принципах строить.
Перевожу: только по GPS — до 18 раз в секунду, совместно с другими системами — до 10 раз в секунду.
Вопрос точности самого определения координат — это другой вопрос.
Например вот трек с Ublox-8. Я точно знаю, что в этом месте я делал перестроение. И на треке четко видно как я менял полосу движения.
Вы предлагаете свою, возможно и более продвинутую, версию\подход…
Самое правильное, и в этой, и-похожих ситуациях, это суммировать положительное, помогая и остальным избегать замеченных ошибок, советуя — как лучше сделать правильно…
Есть недочёты, критические ошибки?-создавайте своё!...-где и давайте развёрнутые простыни по освещаемой вами теме! А часы-вам в помощь!(
часики с GPS-это так модно среди обывателей сегодня!)-что без часов с GPS сегодня-ну никуда, и нигде...!.;-)Так и делаю. Практически все мои обзоры — это развёрнутые простыни, с объяснениями, комментариями, подробными разъяснениями. Да ещё и консультациями в ПМ.
Попытался почитать ваши обзоры про самоделки, дабы «просуммировать положительное», «избежать замеченных ошибок», да и поучиться у вас чему-то новому, не всё же мне сидеть в модно-обывательском болоте.
Да вот незадача… Не получилось.
Бо, я-если и делаю что-то!-то не бегу тотчас оное прославлять, ибо нет всему совершенства…
Ибо, просто стесняюсь демонстрировать и свои(всегда неизбежные!) ошибки, создавая что-то.
Но-уважаю храбрость тех, кто этого не боится(-особенно, не под влиянием п.18..).
Чужд я рекламы, уж простите.
И да, что бы ты не нудел на тему «диванные специалисты которые только критиковать умеют, а сам ничего не сделали». Я тоже сталкивался с такой проблемой. Я правда решал её несколько другим путем, время полученное по GPS преобразовывал вы Unix time с которым легко и приятно работать. С которым поправка на часовой пояс дается просто добавлением нужного количества секунд. А потом при выводе преобразовывал обратно.
Если задать смещение в переменную offset, то настройка и коррекция времени будет выглядеть так:
const int offset = 3; // Наше смещение по времени
Вообще в этой реализации много проблем, как аппаратных, так и программных. Для совсем начинающих пойдет.
Спящий режим и пробуждение по таймеру бы организовать, тогда время работы можно увеличить.
Как вырезали окно под дисплей на корпусе? — ровно получилось.
Это экран, в большей или меньшей степени.
Либо корпус пластиковый, либо антенна — наружу.
Дописал: Антенну нашёл. Она снаружи. Но, вплотную к корпусу. Можно попробывать, чуть отнести её от корпуса и сверить силу сигнала от спутника в обоих случаях.
третья страница от сюда.
чип по крышкой UBX-G7020-KT
фото со снятой крышкой — тут в середине. батарейка там же.
Она точно активная, подключал её еще к модулю ublox pci-5s (питания на антенном разьеме нет, брал для ноута на слот PCI-E) — на нем не работало, надо питание как-то через развязку подавать на антенну
Как с Glonass работает не скажу проверить не на чем
Кстати есть ещё usb модуль VK-172 (u-blox 7) тоже неплохо ловит из помещения и GPS и Glonass (только по отдельности). Правда сейчас группировка Glonass не полноценная, хуже должно ловить походу.
Статья 138.1. Незаконный оборот специальных технических средств, предназначенных для негласного получения информации
Незаконные производство, приобретение и (или) сбыт специальных технических средств, предназначенных для негласного получения информации, — наказываются штрафом в размере до двухсот тысяч рублей или в размере заработной платы или иного дохода осужденного за период до восемнадцати месяцев, либо ограничением свободы на срок до четырех лет, либо принудительными работами на срок до четырех лет с лишением права занимать определенные должности или заниматься определенной деятельностью на срок до трех лет или без такового, либо лишением свободы на срок до четырех лет с лишением права занимать определенные должности или заниматься определенной деятельностью на срок до трех лет или без такового.
Почитав комментарии к данной статье я понял, что уже сам факт покупки или кустарного производства говорит, что вы виновны. Тогда необходимо посмотреть, что же можно покупать, а что нельзя. Об этом нам может рассказать Федеральный закон №144 от 12.06.1995. Согласно данному закону:
Ввоз в Российскую Федерацию и вывоз за ее пределы специальных технических средств, предназначенных для негласного получения информации, не уполномоченными на осуществление оперативно-розыскной деятельности физическими и юридическими лицами подлежат лицензированию в порядке, устанавливаемом Правительством Российской Федерации.
Перечень видов специальных технических средств, предназначенных для негласного получения информации в процессе осуществления оперативно-розыскной деятельности, устанавливается Правительством Российской Федерации.
Разработка, производство, реализация и приобретение в целях продажи специальных технических средств, предназначенных для негласного получения информации, индивидуальными предпринимателями и юридическими лицами, осуществляющими предпринимательскую деятельность, подлежат лицензированию в соответствии с законодательством Российской Федерации.
ПЕРЕЧЕНЬ ВИДОВ СПЕЦИАЛЬНЫХ ТЕХНИЧЕСКИХ СРЕДСТВ…
1. Специальные технические средства для негласного получения и регистрации акустической информации.
2. Специальные технические средства для негласного визуального наблюдения и документирования.
3. Специальные технические средства для негласного прослушивания телефонных переговоров.
4. Специальные технические средства для негласного перехвата и регистрации информации с технических каналов связи.
5. Специальные технические средства для негласного контроля почтовых сообщений и отправлений.
6. Специальные технические средства для негласного исследования предметов и документов.
7. Специальные технические средства для негласного проникновения и обследования помещений, транспортных средств и других объектов.
8. Специальные технические средства для негласного контроля за перемещением транспортных средств и других объектов.
9. Специальные технические средства для негласного получения (изменения, уничтожения) информации с технических средств ее хранения, обработки и передачи.
10. Специальные технические средства для негласной идентификации личности.
Ну что ж, уже исходя из этого складывается некоторая картина. Не все что продается в интернете законно покупать и использовать. (Кто бы мог подумать? Это как внезапный снег в декабре…)
Подведем итог:
1. Любой трекер может быть идентифицирован как, и является, специальным техническим средством.
2. Специальное техническое средство должно быть лицензировано (каким-то образом легализовано для производства, продажи и покупки на территории РФ). То есть даже физическое лицо приобретя стс за границей должно получить лицензию на ввоз.
3. Изготовление кустарным способом (читай сделать приспособа из старого мобильника), реализация (вот что это значит? Продажа или исполнение замысла, получение результата – тогда бы написали использование…), покупка и продажа не лицензированных СТС карается по закону (причем так не хило. 200 тыр, 4 года…).
Ключевое слово: для негласного
Кто-то будет разбираться в гласности и негласность? Есть устройство. Устройство имеет определённые габариты. Может быть использовано негласно? Может! Факт изготовления был? Был!
Устройство является СТС? Да. Лицензия есть? Нет!
Виновен.
В чем я не прав?
Напоминает анекдот
Мне это не нравится, я считаю политику ценообразования неправильной, но… ля, закон есть — и его ни кто не отменял.
Кто знает в какой момент захотят объявить «охоту на ведьм» и попадётся ли ваша покупка или рукоблудие под это?
Согласно данному закону, хотите трекер в машину — купите в России. Они есть. Но стоят в разы дороже. Цена на з/ч из поста до 1000 р., цена готового решения на али около 1000 р. Цена готового решения в России 5000-7000. Вот откуда???
Да пара событий на страну где 140 млн. населения. Причем кончается всё ничем.
gpspp.sakura.ne.jp/rtklib/rtklib.htm
gpspp.sakura.ne.jp/rtklib/rtklib_beagleboard.htm
www.kickstarter.com/projects/swiftnav/piksi-the-rtk-gps-receiver?token=398b4977
точность сантиметр.
Есть возможность передать на устройство дельту со стационарного приемника. Как думаете, если на движущемся устройстве делать поправку на эту дельту — улучшится точность? Мне сантиметров не надо — +- полметра или даже метр достаточно.
Почитайте про координатные фильтры…
Openlog — уже и мега и карта на одной плате, размеры миниатюрниийшие.
Теперь критика:
1) название: антенна-маяк хммммм ну хотя бы «антенна и маяк»!
2) «В комплекте идет пассивная антенна:» — показанная антенна, активная, забирает немного питания на себя. Сравните ток модуля с такой антенной и без нее (при холодном старте).
3) «При желании всегда можно заменить активной или изготовить самому, по этой методике:»
показана разорванная рамка с длиной около одной длины волны, но не показан способ подключения такой антенны. Далее по фоткам можно понять, что автор припаялся к контактной точке керамической антенны, и получил антенну с непонятной диаграммой направленности. Предположу, что и без этой проволочки керамика работает не хуже. Не думаю, что нам здесь покажут диаграммы уровней сигналов спутников для «керамики» и «доработанной керамики», а так говорить об эффективности — всего лишь эмоции автора.
4) «На рисунке ниже я показал, какие линии куда подключать, что бы GPS определился в компьютере:» — на блоке GPS не показаны названия PINов. Если взять в руки модуль, можно понять, что на данном изображении соединения TX/RX нарисованы с ошибкой.
5) Про расчет часовых поясов тут уже написали.
модуль флешки пока не подключен.