Борьба за шума и тишины, жары и прохлады, расточительства и экономии, брутальности и комфорта.
Стоят ли изменения потраченных на них денег? Посмотрим. С графиками, осциллограммами, замерами шума, электричества и вибраций.
Да, и все модернизации выполнены ленивым человеком, с минимальными затратами труда, по принципу «воткнул — работает».
Кратко: драйвер — устройство, позволяющее управлять шаговым двигателем. На входе — команды на сколько шагов поворачивать вал и в какую сторону. На выходе — последовательность сигналов на обмотки электромотора. Всю кухню по преобразованию одного в другое выполняет драйвер. Драйвера бывают хорошие и не очень. Хорошие поддерживают большие выходные токи, мало греются и управляют двигателем так, что он не гудит, не греется и крутится плавно. У плохих все наоборот. Драйвера применяются везде, где есть шаговые двигатели: 3Д принтеры, станки с чпу, лазерные граверы, актюаторы и прочая техника.
У меня есть 3д принтер, Anycubic I3 Mega. Это простой и недорогой принтер с подвижным столом. В нем установлено 5 шаговых двигателей и 5 драйверов для них. Один двигает стол, второй — печатающую каретку, два двигателя установлены на оси Z, поднимая вверх балку с кареткой и последний драйвер управляет экструдером, который подает филамент к хотенду. С завода на принтере стоят драйвера A4988. Это недорогие, простые, но очень надежные драйвера. Они обеспечивают хороший крутящий момент на валу двигателя и никогда не выходят из строя. Но принтер с ними работает шумновато. С характерным звуком «з-з-з-з» как при движении роботов в фантастических фильмах. Но производитель предусмотрел возможность апгрейда, не распаяв драйвера на плате принтера, а установив их в слоты. По посадочным местам драйвера принтеров совпадают, так что апгрейд не должен быть сложным: одни вытащили, другие поставил.
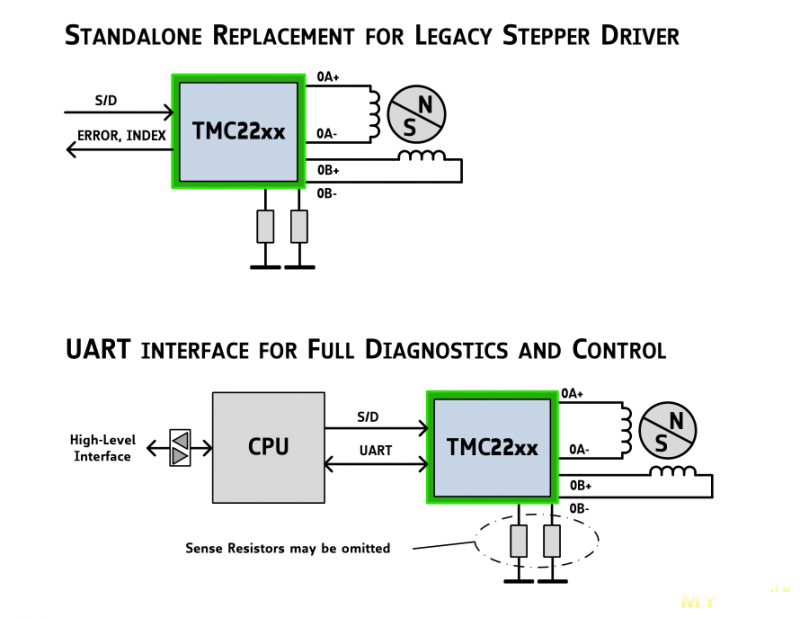
Итак, что мы знаем о TMC2208? Описание этого драйвера занимает 81 страницу в pdf. Что само по себе говорит о сложности устройства и его возможностях. Весь мануал я конечно не читал, но с основными моментами ознакомился. У драйвера есть два режима работы. В первом режиме он управляется с платы принтера по uart. Во втором он ведет самостоятельную работу, выполняя тот же функционал, что и родные драйвера, но делая все элегантнее и экономичнее. Такая универсальность предоставляет вам выбор — можно за 3 минуты воткнуть новые драйвера, закрыть гештальт и наслаждаться тишиной, а можно добавить провода связи платы принтера с драйверами, перепрошить принтер, освоить новые функции. В этом случае драйвера позволят адаптивно перенастраивать управление двигателями под требования печати, снимать с драйверов данные (температуру и пр.) и делать автокалибровку стола, следя за пропусканием шагов при утыкании сопла в поверхность.
У этого драйвера сейчас на рынке есть конкурент — TMC2130. Производства той же германской фирмы. У него чуть шире функционал, но он управляется по SPI. Это более высокоскоростной, но и более капризный в интерфейс. Так что я выбрал 2208. Версия 1.2 — хороший компромисс между ценой и доведенностью. У первой версии 1.0 были недопилены некоторые функции, 1.1 отличался другой разводкой платы, которая не подходила к моему принтеру, а версии более современные, чем 1.2, обладают лишь одним значимым отличием — у них выходы на обмотки мотора совпадают с выходами 4899. Но это легко лечится, скоро мы до этого доберемся. Так что из «умных» драйверов 2208 v1.2 — дешево и сердито.
Описывать в подробностях технологии, применённые в драйвере, распиновку и команды наверное смысла нет — все это есть в мануале и такое глубокое погружение для первого ознакомления избыточно. Так что перейдем к посылке. Что же это к нам пришло?
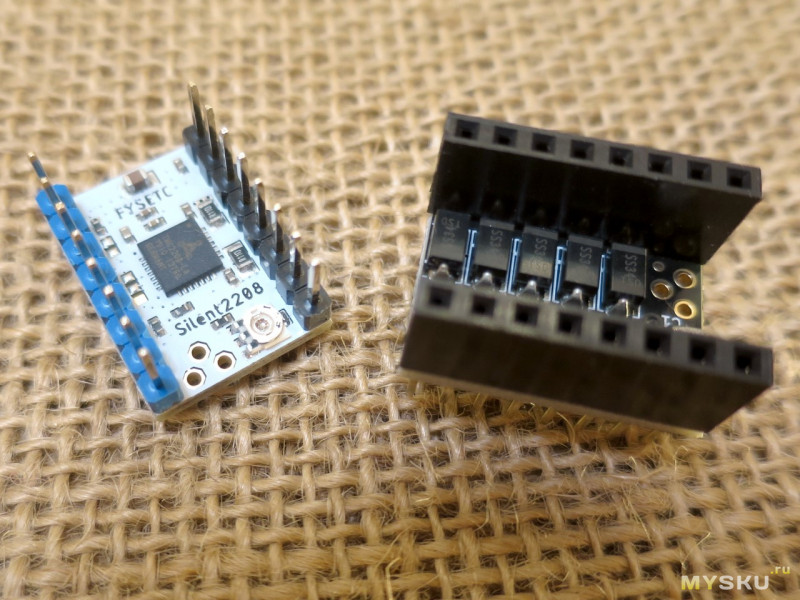
Мне достался вариант с пятью драйверами порознь. В магазине продаются и комплекты из пяти штук сразу.
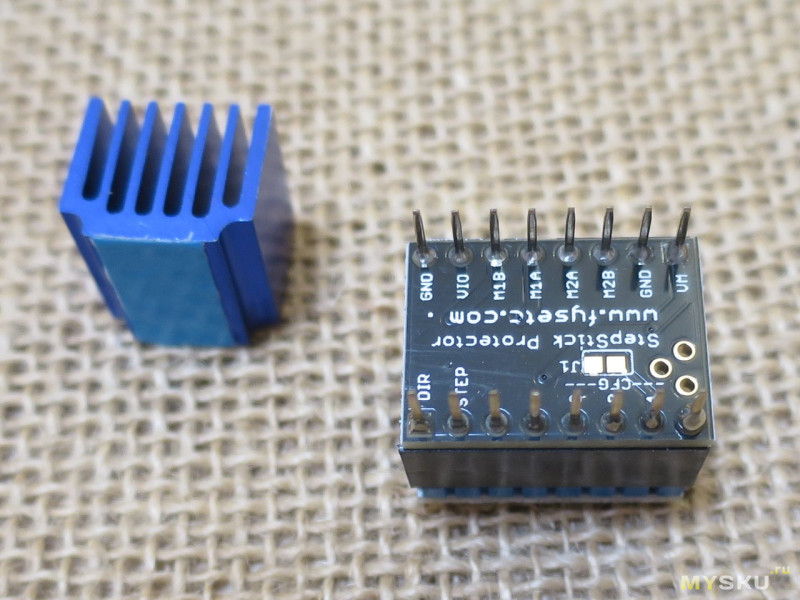
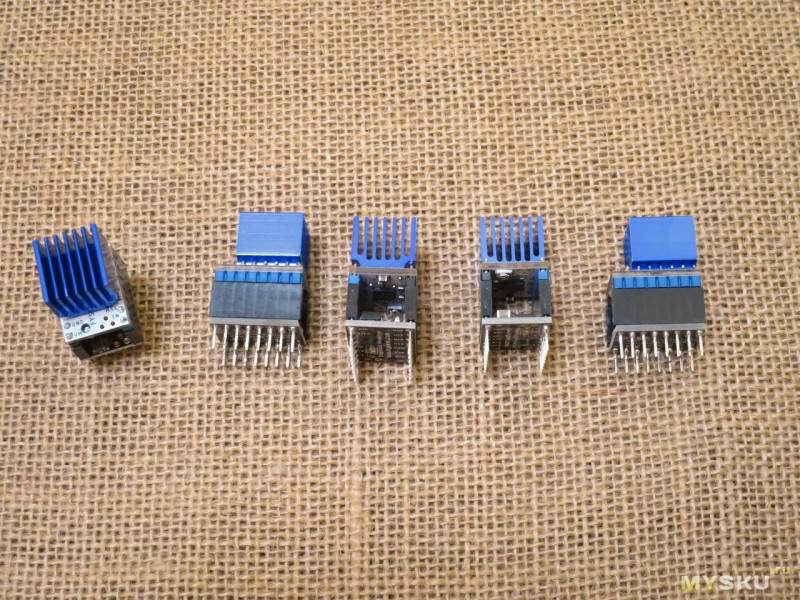
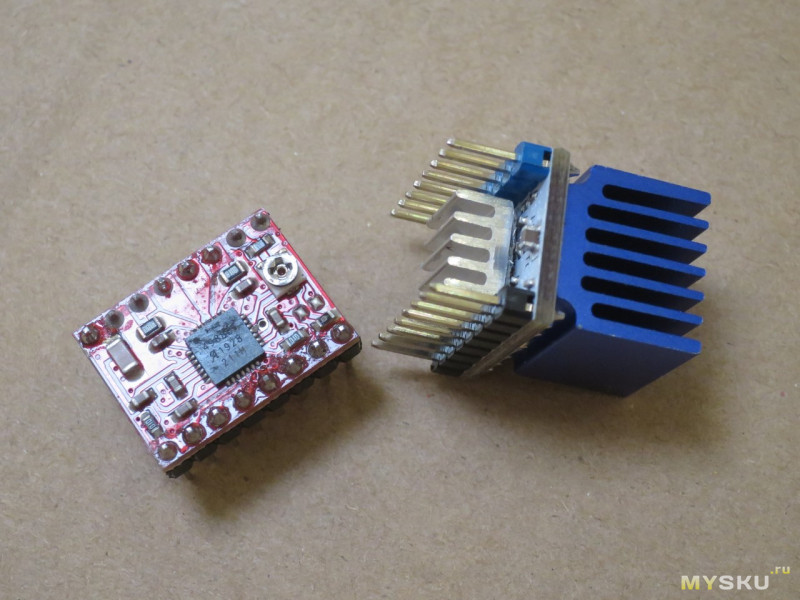
Комплект самый полный: драйвер, радиатор, степстик протектор и даже специальная отверточка для настройки. Упаковка — полиэтиленовый пакетик. Ножки защищены от загибания пенкой.
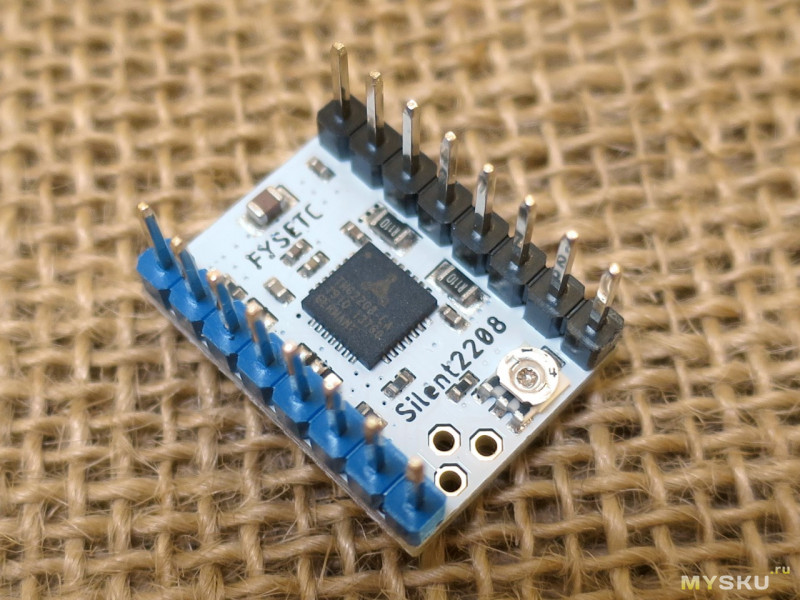
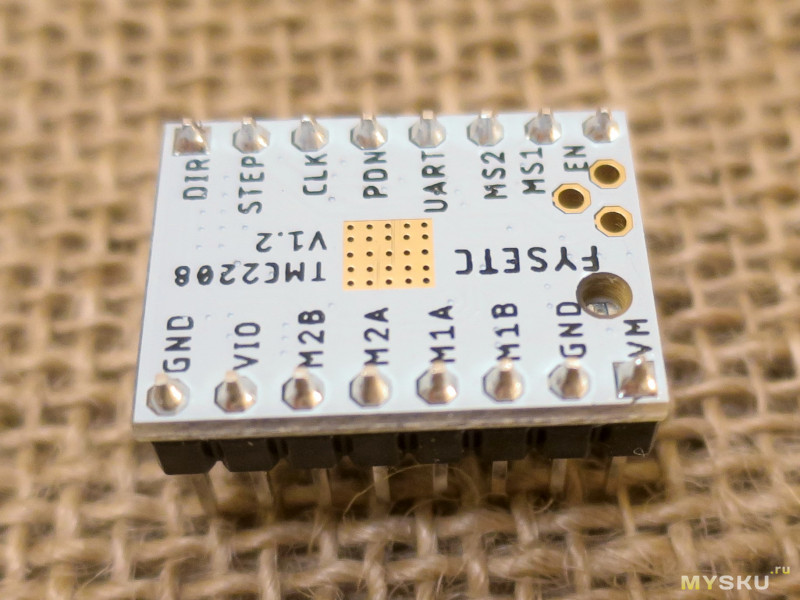
Радиатор из анодированного алюминия. Самый массивный из всех радиаторов для драйверов. Его установка стала возможной, потому что плата драйвера ориентирована вверх дном: все элементы расположены между ногами, а на внешней стороне ровная поверхность с термоинтерфейсом. Ноги модуля из гребенок разных цветов — с одной стороны синий, с другой — черный. Видимо это сделано для того, чтобы не поставить в плату задом наперед. В этом случае модуль скорее всего сгорит. У меня в принтере посадочные места без цветовой маркировки, но и там и там все ноги подписаны, так что нужно всего лишь быть внимательным при установке.
Еще на плате модуля имеется регулировочный реостат. Он задает ток на обмотках мотора. Не смотря на то, что он тоже установлен на нижней поверхности платы, вращать его можно не вынимая драйвер из слота, через отверстие в плате драйвера. Для контроля выходного тока нужно отслеживать напряжение в контрольной точке на плате.
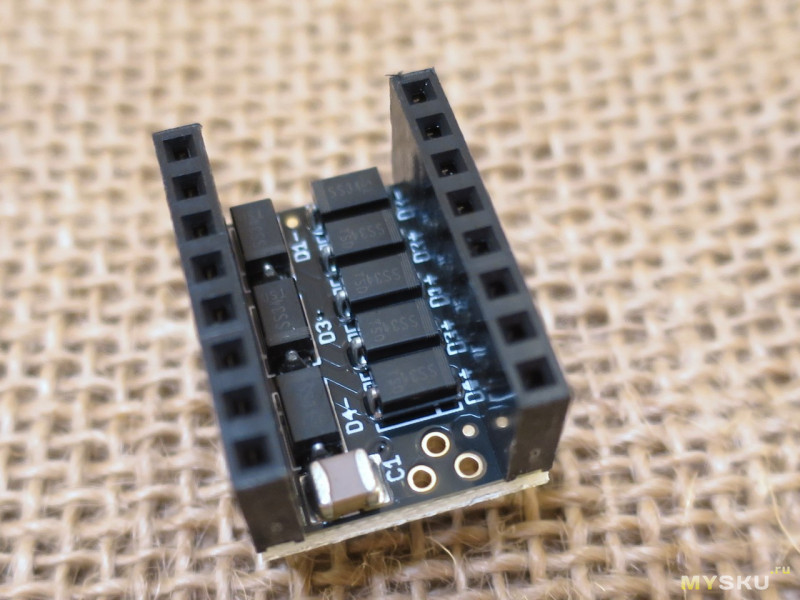
Степстик протектор устанавливается между платой принтера и драйвером. Его назначение — фильтровать сигналы от драйвера на моторы и предотвращать обратные токи. Он состоит из 8 диодов Шотки SS34 на 3А 40В и керамического конденсатора. Позже посмотрим как он работает.
Отклеиваем защитную пленку от радиаторов и собираем комплект:
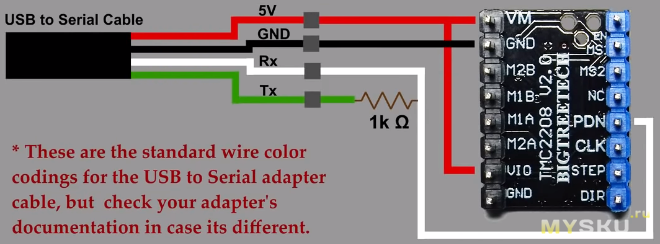
Прежде чем устанавливать драйвера в принтер, мне захотелось взглянуть на возможные настройки. Настраивать драйвера можно не только при работе принтера, но и подключив их к компьютеру, через интерфейс usb-uart. Интересно, что и rx и tx подключаются к одной ноге драйвера, но с использованием резистора. Вот по такой схеме:
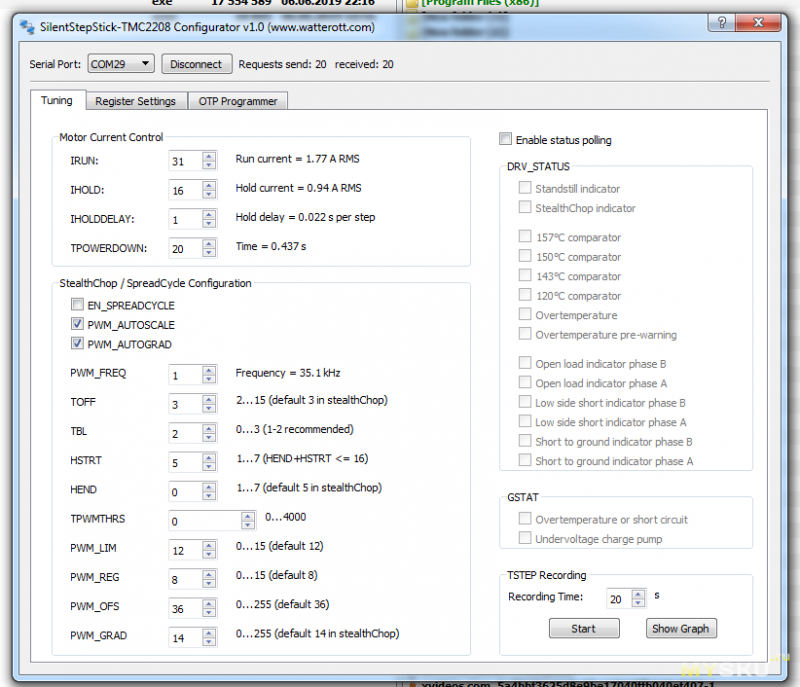
Дальше находим и скачиваем в интернете файл TMC2208_soft-master.zip, там есть все необходимое, чтобы увидеть и изменить настройки драйвера. Да, для того, чтобы ввести драйвер в режим настройки, нужно повесить соплю припоем на пару контактных площадок на плате драйвера. Я просто замыкал их тонкой отверткой. Вот что у меня показала программа настройки:
Честно говоря, я тут мало что понял, а разбираться не хотелось, так что я довольствовался тем, что драйвер в принципе управляется через uart. На последней вкладке программы есть возможность OTP программирования — one time programmable memory. Один раз можно занести нужные значения в регистры драйвера и потом жить с этими значениями всю жизнь. Не разобравшись досконально было бы слишком безрассудно трогать эти настройки, так что я отсоединил драйвер и перешел к установке его в принтер.
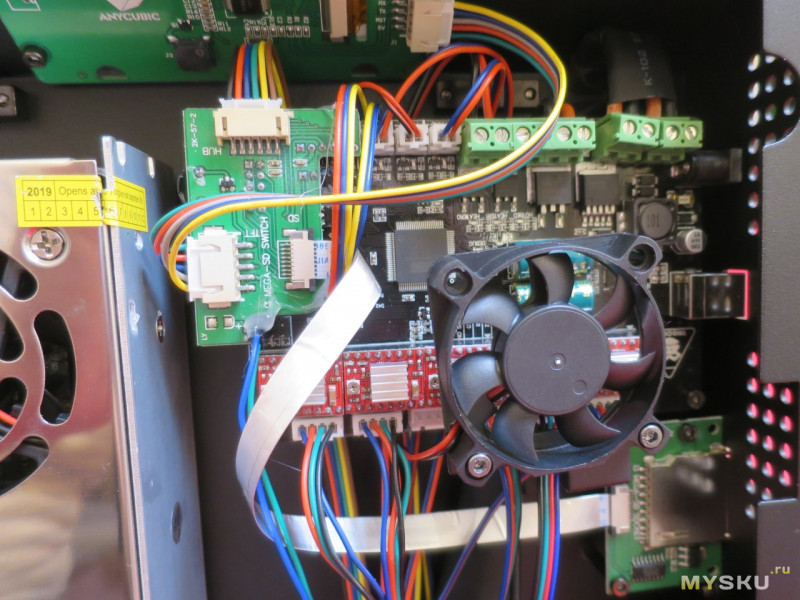
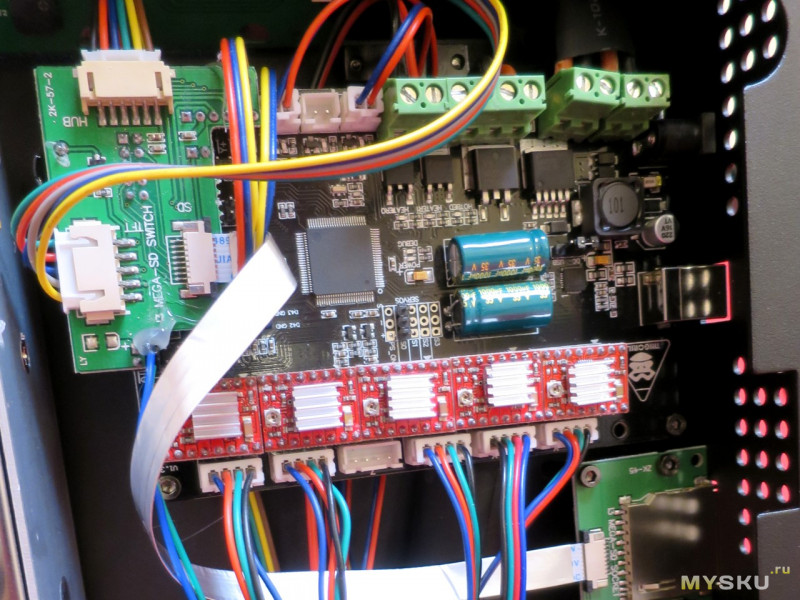
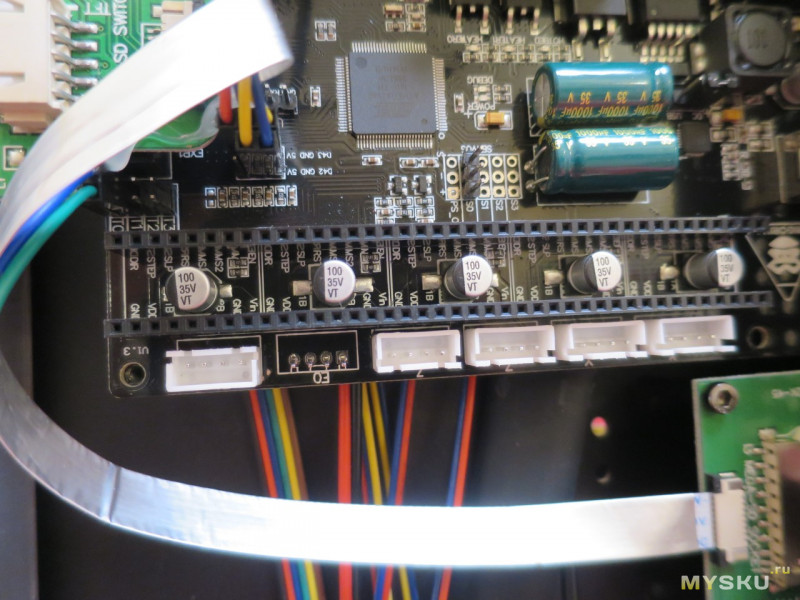
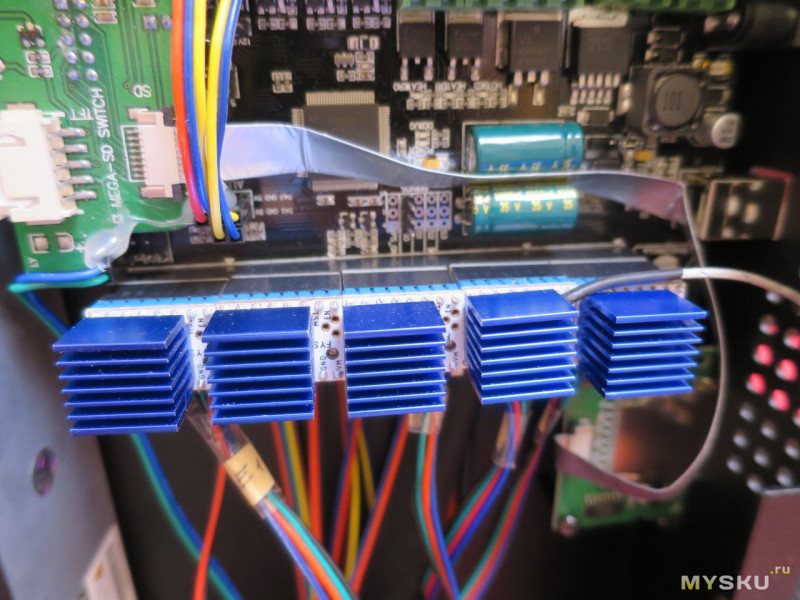
Вскрыв принтер, я увидел вот что:
Красные модули — это и есть драйвера A4899, которые подлежат замене. Перво-наперво, снимаем вентилятор.
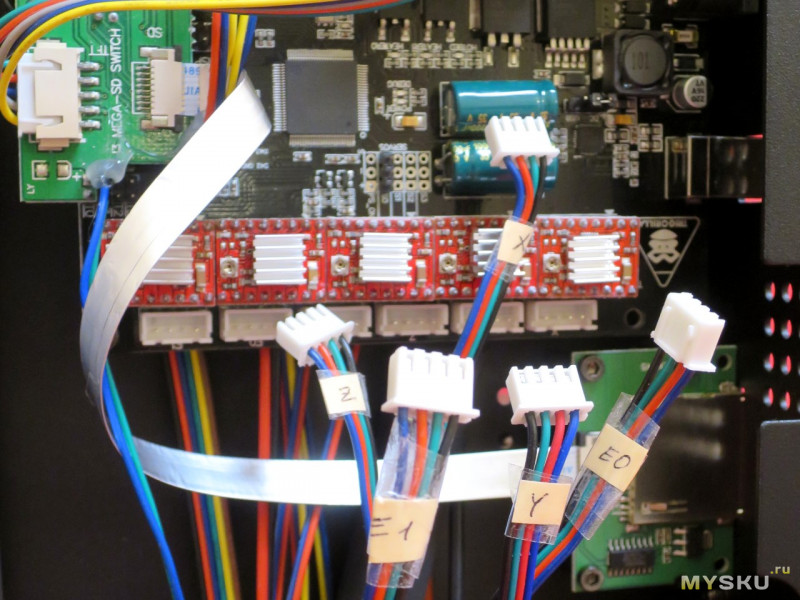
Далее подписываем все отсоединяемые провода и отсоединяем их.
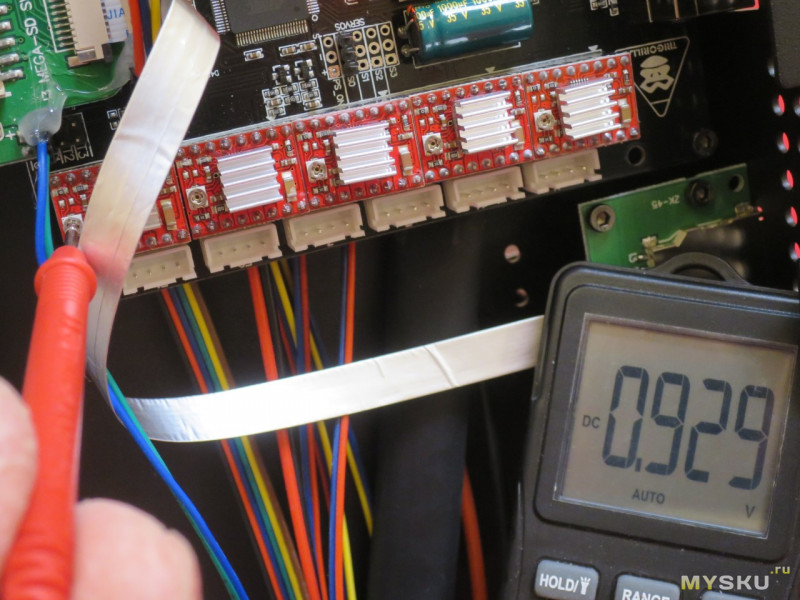
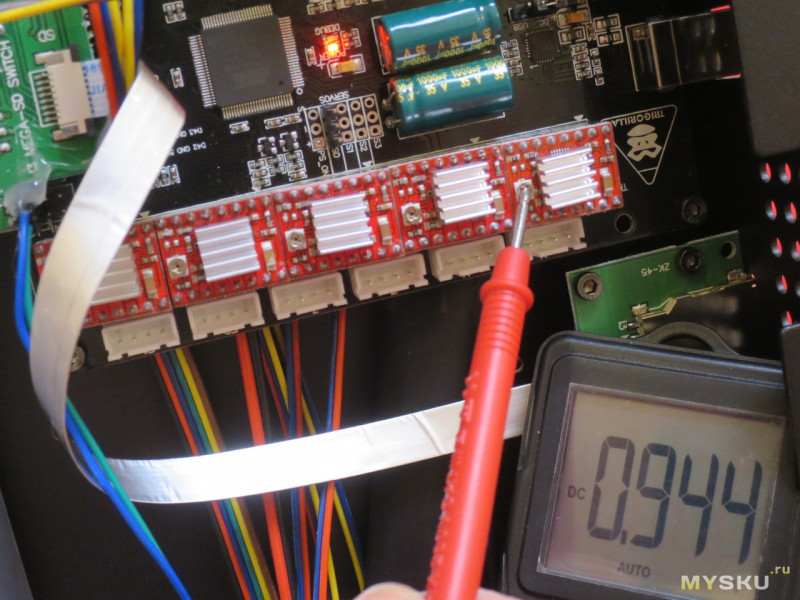
Затем нужно включить принтер и измерить напряжение на стоящих драйверах. Нам нужно будет его выставить на новых. Напряжение измеряем между корпусом блока питания и контрольной точкой. Но мне проще было подключить щуп вольтметра к регулировочной отвертке и измерять непосредственно на регулировочном реостате. Иногда в комплект драйверов кладут керамическую отвертку, чтоб ненароком не коротнуть там что. Мне дали стальную и в этом свои плюсы — можно не орудовать там, среди контактов и проводов, сразу и отверткой и щупом, глядя при этом на экран вольтметра.
Итак, первый драйвер, он обозначен как E1 и он заведует вторым мотором на оси Z:
0.929 вольта.
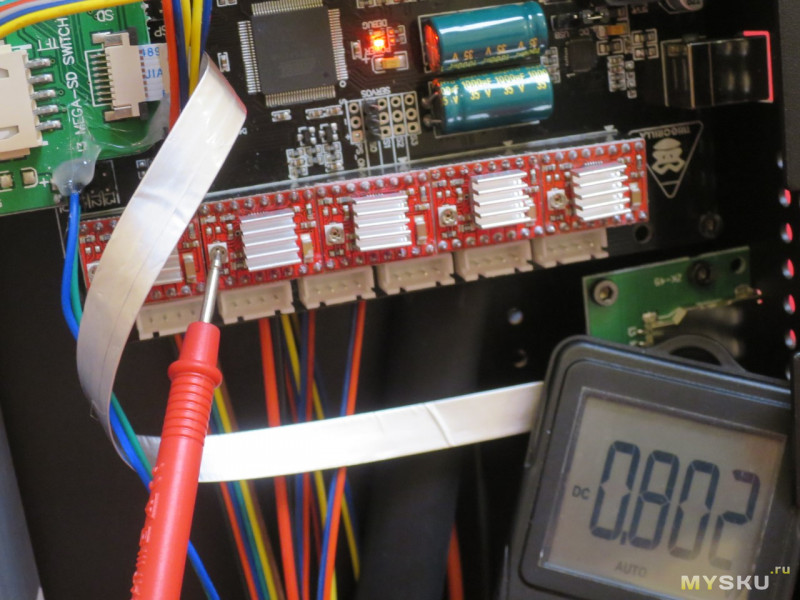
Второй драйвер — экструдер:
0.802 вольта.
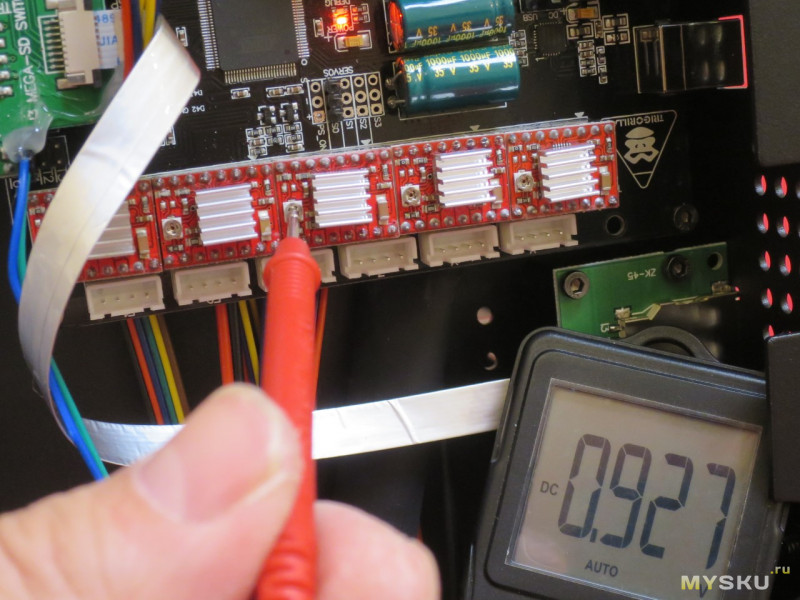
Третий — первый мотор на оси Z:
0.927 вольта. Хорошо, что напряжения моторов по оси Z почти совпадают.
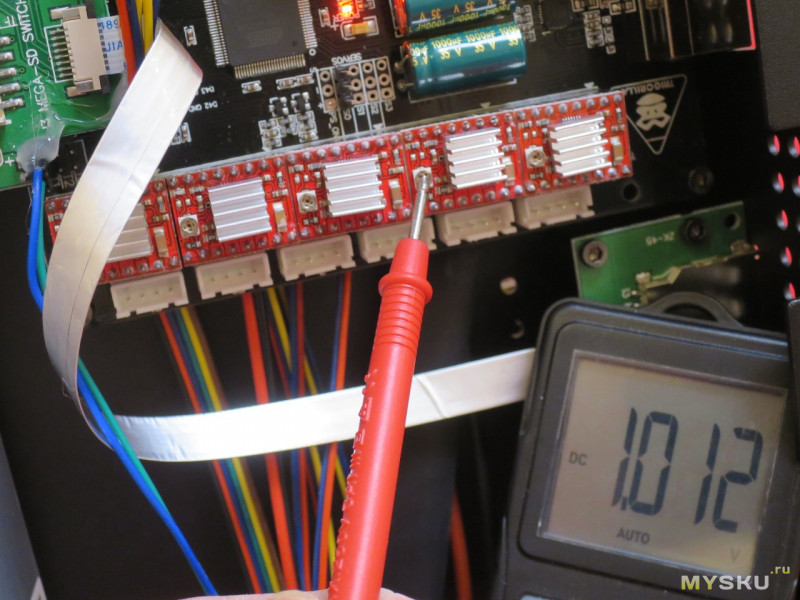
Четвертый драйвер — ось Y, перемещение стола:
1.012 вольта. Логично, что для перемещения тяжелого стола требуются бОльшие токи.
Наконец, ось X — движение каретки:
0.944 вольта.
Я записал назначение каждого драйвера и его напряжение на бумажках и вложил их в пакетики из-под купленных драйверов. Туда же вложил снятые драйвера.
Все готово к установке? Нет, не все. Как я говорил, у новых драйверов поменяны местами выводы на обмотки моторов. Если их просто поставить, принтер будет перемещать, к примеру, каретку влево, а по факту она будет перемещаться вправо. Все это будет происходить до утыкания каретки в ограничитель, а потом пойдут пропуски шагов с характерным треском. Нам это не нужно, нам нужно, чтобы все работало и для этого у нас есть три варианта: а) перепрошить принтер, поменяв пару настроек в прошивке, б) поддеть скальпелем и вытащить из колодок два провода и поменять их местами и в) повернуть пластиковые детали разъемов другой стороной. Мне показалось, что последний способ наиболее простой. Слева разъем уже перевернул, следом в процессе, осталось еще четыре:
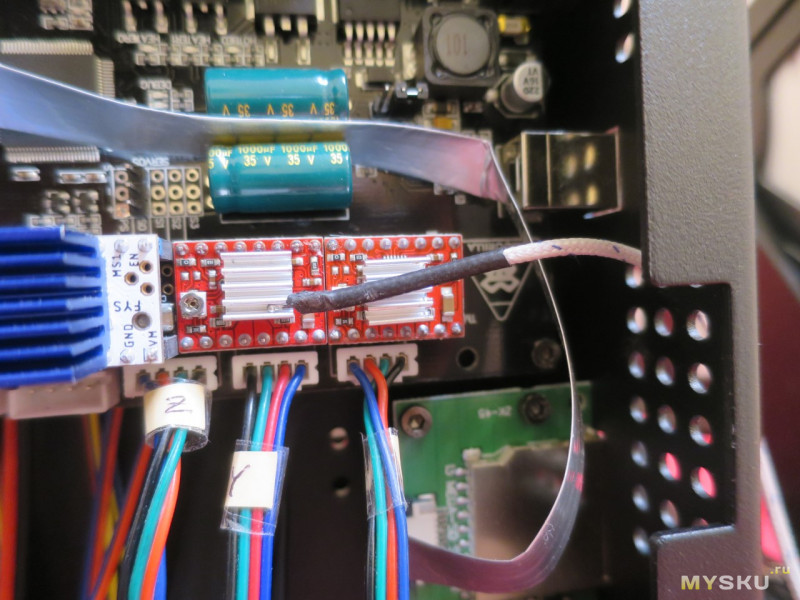
Казалось бы, вот и все. Но нет. Беда пришла, откуда не ждали:
Драйвера немного крупнее старых. Буквально, четверть миллиметра. Но как старые, гуськом, они уже не влезают.
Мне пришлось немного подпилить платы надфилем. Не все принтеры предусматривают такую рядную установку драйверов. Так что вам, возможно, делать ничего не придется.
После установки, но до подключения проводов, я выставил на драйверах нужные напряжения. Надо сказать, что они выставляются очень точно и до тысячной доли вольта выдерживаются в последствии. Что на старых драйверах, что на новых. Никакого дребезга контактов, никаких флуктуаций — выставил 0.944, значит будет 0.944, сейчас и через час.
Подключил провода. Первым делом, мне захотелось посмотреть, так ли необходимы эти модули защиты. Полистав интернет, я понял, что есть три аргумента в пользу их установки.
Первый: при переходе напряжения драйвера через 0 без этого защитного модуля возникает скачок, потому что существует некое ограничение на минимальную длительность шим-импульса, и совсем близкие к 0 напряжения драйвер выдать неспособен. С модулем все напряжение сдвигаются на напряжения открытия диода и скачок, таким образом, нивелируется.
Второй: в дельта-принтерах перемещение одной оси создает момент и на других. Их моторы в какой-то степени начинают работать как динамо, создавая противотоки. Таким образом возникает «эхо» перемещения одной оси на других осях, особенно заметное на гладких поверхностях с небольшой кривизной. Опыты с защитными модулями на дельтах это подтверждают, но у меня не дельта, и перемещение одной оси никак не влияет на другие.
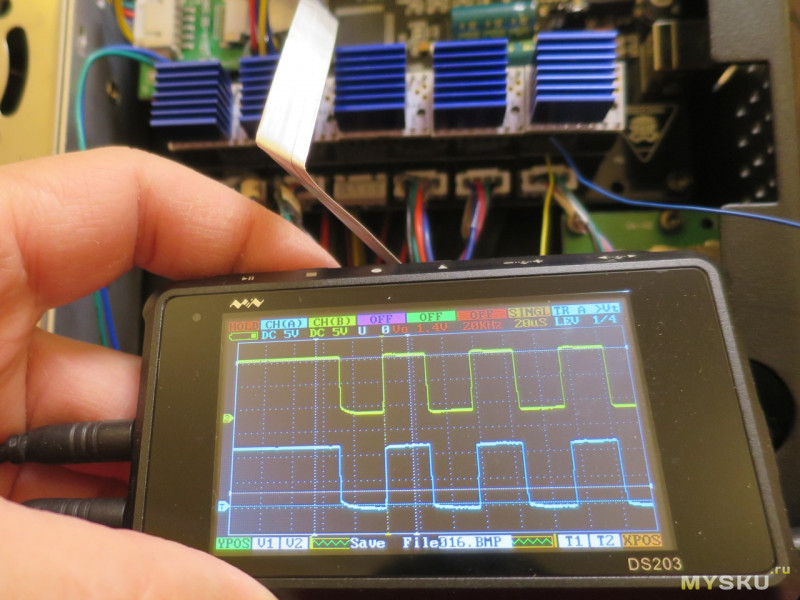
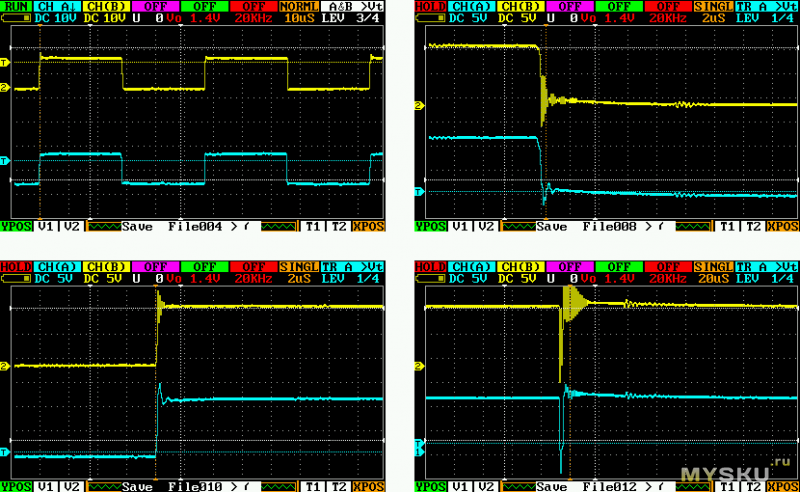
Третий: защитные модули служат для защиты драйверов от токов, наводящихся при перемещении стола и экструдера. Конечно, я не собираюсь елозить столом как диджей, но мало ли. Посмотрим, в осциллограф, как меняется сигнал до и после модуля:
Сверху до, снизу после.
Крупнее, четыре варианта:
Ну что, эффект определенно есть, оставляем платы, хуже не будет.
Далее мне захотелось посмотреть что там у нас с температурой при работе. Массивные радиаторы намекали на то, что с ней могут быть проблемы. Вопрос с охлаждением еще предстояло решить, потому что если оставлять модули защиты, то новые драйвера занимали практически все место по высоте и старая схема уже была неприменима. Я воткнул термопару от токоизмерительных клещей между ребрами радиатора самого нагруженного драйвера — того, который перемещает стол.
Для эксперимента сделал временный обдув. Пробная печать — температура не достигла 50°C. Терпимо.
Заменил драйвер на старый, подключил термопару к нему — почти 60°C.
Похоже, с охлаждением все будет хорошо. Но старый вентилятор уже не поставить — места нет. В интернете нашел популярный вариант модернизации.
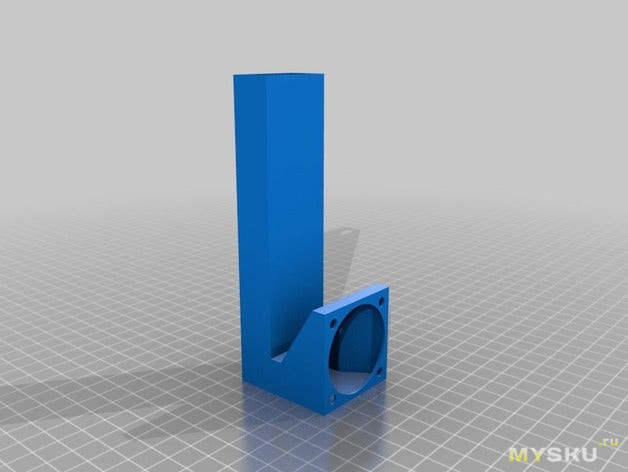
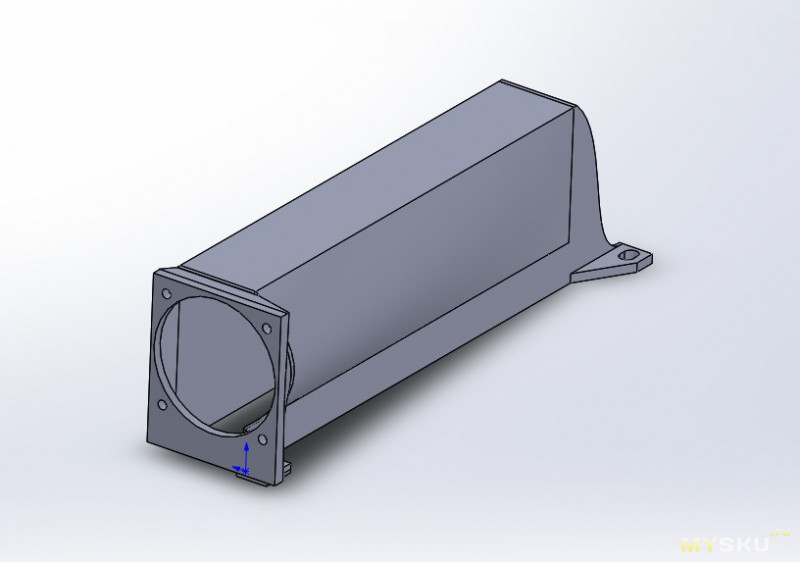
Но он мне не понравился: поток резко разворачивается на 90 градусов, причем в месте поворота заужение сечения вдвое. Так дела не делаются — решил я и нарисовал свой воздухоток.
Правда, вентилятор пришлось взять поменьше — 30 мм с толщиной 7 мм. Но снижение его производительности с лихвой компенсировалась снижением аэродинамических потерь по сравнению с распространенным угловым вариантом и прицельностью обдува по сравнению со штатной системой охлаждения.
Возникла еще одна проблема. Даже не проблема, а так — обстоятельство. Воздуховод касался крышки принтера. Не то чтобы он в нее упирался, но касался. А это могло привести к повышенному шуму. На всякий случай я решил немного понизить установку платы. Для этого нужно отпилить по миллиметру с четырех стоек, на которых установлена плата. Дремелем это делается за пару минут. А резьба в стойках похоже сквозная, так что винты нормально вкручиваются даже в укороченные стойки.
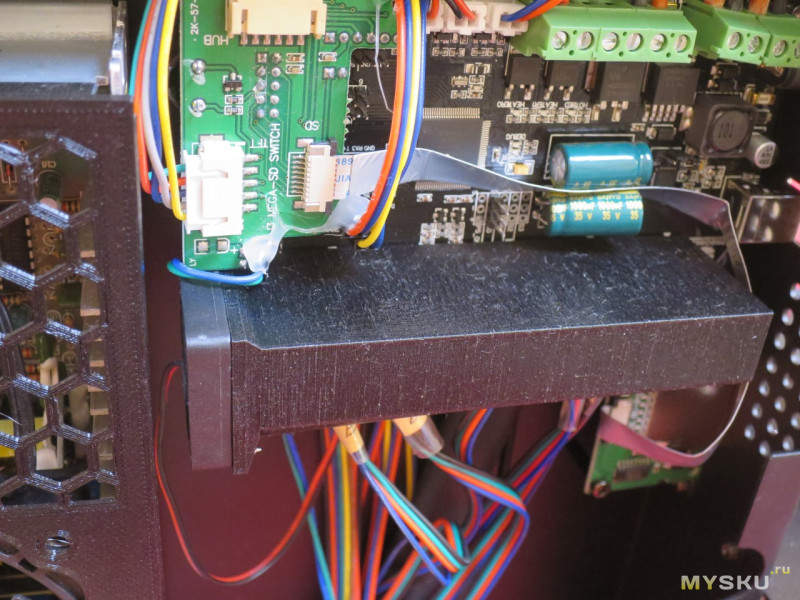
Воздуховод на месте:
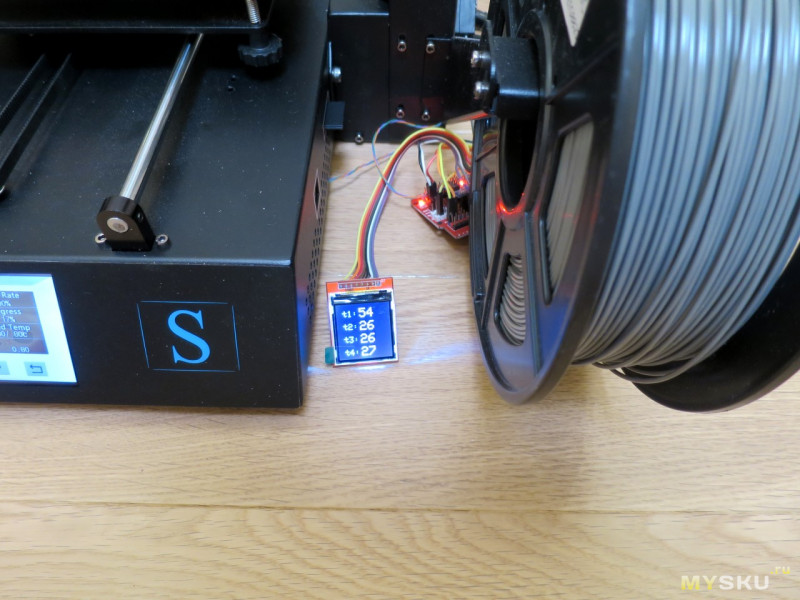
Температура меня все еще немного беспокоила, и я решил посмотреть не на мгновенные ее значения, а, так сказать, охватить процесс в динамике. Для этого я использовал свой четырехканальный термометр, который пишет показания на флешку. Я его сделал в свое время для тестирования термоизоляционных свойств спальных мешков. На этот раз задействовал один первый канал.
Старые драйвера. Пробная печать небольшого объекта.
Печать еще не окончена, а температура уже 54 градуса.
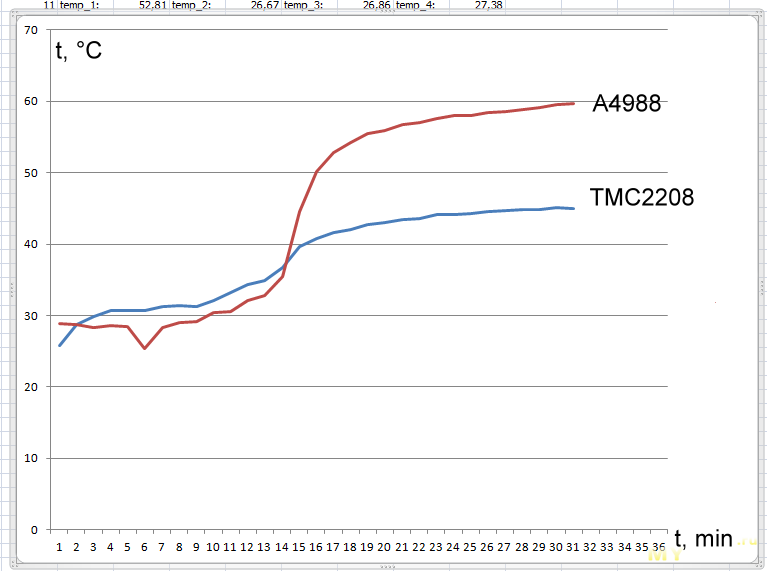
Потом тот же объект, новые драйвера. И вот график изменения температуры:
Видно, что график 2208 уже близок к насыщению, а 4988 все еще имеет тенденцию к росту.
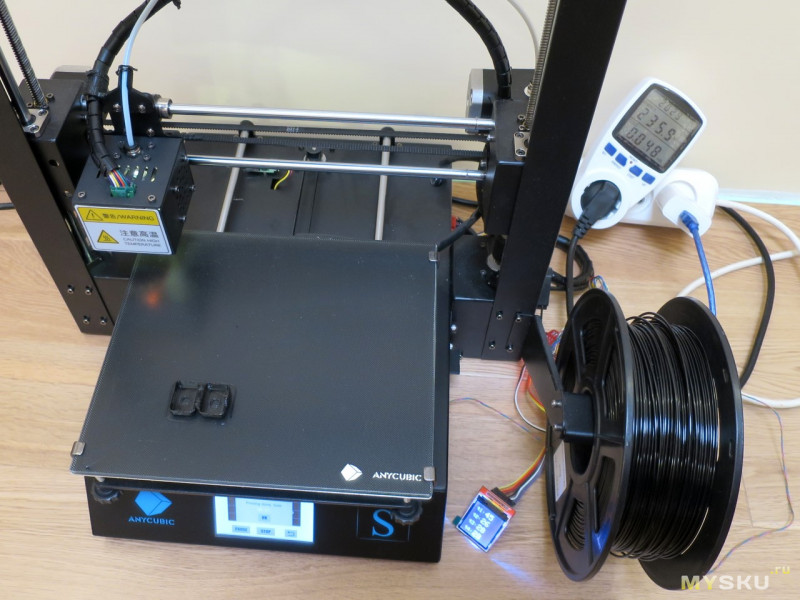
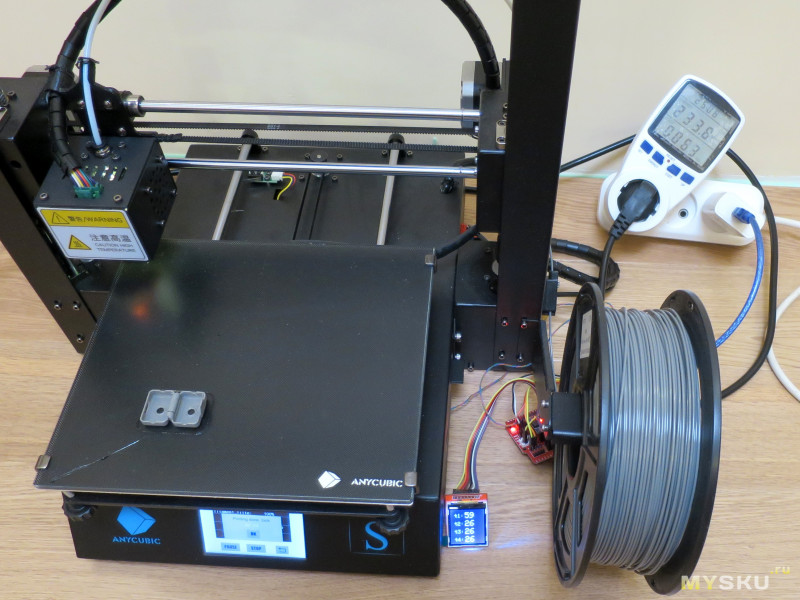
Но ведь тепло — это электричество, за которое мы платим? Наверное, на новых драйверах и потребление электричества ниже? Меньше греется блок питания, меньше крутится вентилятор, меньше рассеивают тепла двигатели? Посмотрим на тестовой печати:
Новые драйвера. Фильтр филамента потребовал 0,048 КВт.ч.
Старые драйвера. Та же модель, те же условия печати: 0,063 КВт.ч. На треть больше!
Новые драйвера не только тише и холоднее, они еще и сэкономят вам электричество.
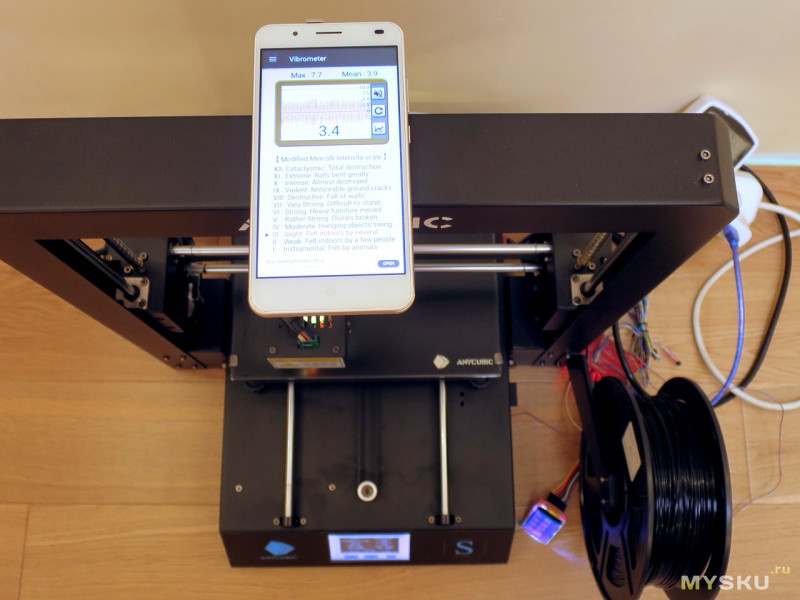
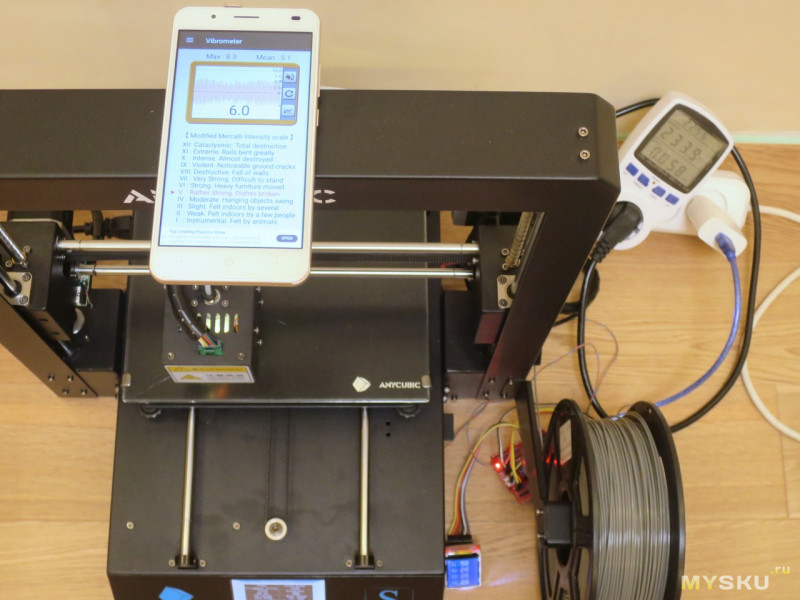
Еще один тест: вибрации. Для него я поставил на телефон программу, отслеживающую вибрации, и телефон положил на печатающий принтер.
Новые драйвера: 3,4 балла. Конечно, цифры заметно менялись во времени, но 3,4 — типичное значение.
Старые драйвера:
6 баллов! Вибрации, как и следовало ожидать, значительно сильнее.
Быть может, качество печати упало? Нам поможет кораблик Бенчи:
Сложно фотографировать белый кораблик при искусственном освещении. Поверьте на слово, оба комплекта драйверов дали практически неотличимый результат.
Теперь финальный и самый важный тест, из-за которого и затевался, весь обзор. Шум!
На телефоне запущен шумомер. Старые драйвера — под 50 дБ, новые — 40-45. Разница на самом деле сильнее, чем кажется по цифрам. Температура отличается на 10 градусов в пользу 2208.
По-моему, все предельно ясно. После установки драйверов остался слышен только шум кулеров. Шум — это не только вопрос комфорта. Достигнутый уровень шума позволяет ставить принтер в комнату где отдыхают люди. Запускать печать на ночь. За счет этого снова экономить на электричестве. Субъективно, шум стал на уровне шума от системного блока компьютера. Для такой машинерии, с множеством перемещающихся деталей, это очень хороший показатель.
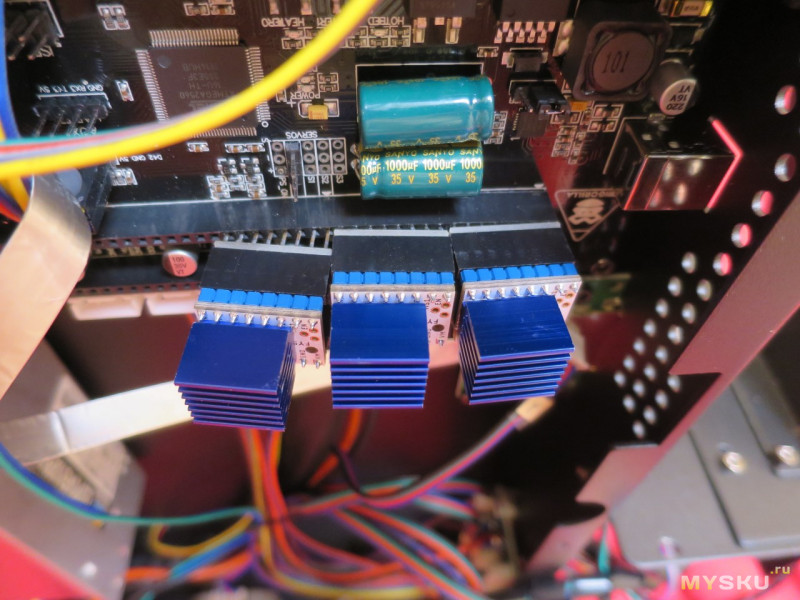
Теперь, когда эксперименты позади, я окончательно распрощался со старыми A4899. А значит, с них можно снять их маленькие радиаторы и налепить на чип 2208 — хуже не будет. Тем более, что поток воздуха омывает драйвера с изнанки столь же эффективно, сколь и со стороны основного радиатора.
Вот и все, обзор получился однобокий, но честный. 2208 рвут 4988 по всем критериям.
P.S.: Ах да, чуть не забыл. Менеджер магазина просил передать, что устроил для вас, читателей этого обзора, скидку еще на 14% к той, что уже есть на сайте. Дополнительная скидка по купону BGfe75b2.
Теперь точно все. Спасибо за внимание.
Товар предоставлен для написания обзора магазином. Обзор опубликован в соответствии с п.18 Правил сайта.
Планирую купить+31Добавить в избранноеОбзор понравился+70
+108
нафиг нужны эти 2208 когда есть 2209, по цене прирост не особо большой, зато ток почти в 2 раза выше держат и греются при этом значительно меньше
Брал версию v2.1 комплект из 6шт. 174.28 юаня = 25.4$. Сейчас версия v3.0 комплект из 6шт можно купить за
201.00¥ = 29.37$
Вот вы советы раздаете, знаниями блеснули, а по факту что? Зачем на Anycubic I3 Mega 2209? Оно там избыточно. Автор хотел добиться тишины и качества печати. 2208 покрывают его задачи полностью.
Греются они одинаково, если правильно настроить токи при работе в UART. Это вам не 2130 кипятковый.
Садитесь, двойка вам.
А автору двойку за то что фюзтеч купил 1.2, а не бигтри 3.0.
Без, она не настолько нужна, скорее это маркетинг и самоуспокоения. Примерно та же фигня что и tl smoother, вроде эффект есть а вроде его и не заметно.
Ну если у тебя не заметен, то есть куча народу у которых заметен. на некоторых механиках и электрических состовляющих эффект реально есть. Но не везде.
Все возможно, поэтому на вкус и цвет как говорится. Бюджетно если и без заморочек то достаточно поставить драйверы и не париться. Мне на эндер3 достаточно просто драйверов.
Затем нужно включить принтер и измерить напряжение на стоящих драйверах. Нам нужно будет его выставить на новых.
Vref для A4899 и для TMC2208 рассчитываются по разному и имеют разные значения. И кроме этого зависит от зависит от номинала токоизмерительных резисторов, установленных на плате драйвера — Rsense
Прелесть Trinamic в том, что в эти драйверы не надо лазить отвёрткой, высчитывая дроби в уме и рискуя коротнуть что-то по пути. Ток можно выставить программно, прямо из g-code. В Marlin это делается так: marlinfw.org/docs/gcode/M906.html
Просто смотрим на паспортные характеристики мотора (у моих, например, рабочий ток — 0,8А) — и соответственно выставляем в auto0.gcode, который исполняется при включении принтера.
Согласен! Правда не знаю, что проще. Раз уж идёт замена драйверов, то наверно проще выставить сразу расчётное Vref.
А программно если только подкорректировать, при необходимости.
Ну и ТС пишет о том, что собрался скопировать Vref с A4899 на TMC2208.
А у Вас Анька? Раз моторы на 0,8 стоят. Или китайцы их всюду впаривают…
Для этого их надо сначала подключить по UART, что в случае принтера ТС сопряжено с некоторыми сложностями с проводкой. На более современных платах типа SKR, конечно, проще.
Ну, вручную тоже может стоит поставить что приличное, если я правильно понял, то при каких-либо проблемах со связью с драйвером он переходит обратно в standalone и работает по выставленному на плате vref.
Поменял на своем аналоге А8 драйверы на TMC2208 только на X и Y осях, сразу стало очень сильно тише. Z редко жужит, а вот про экструдер не подумал)), тоже надо бы сменить. На али они дешевле гораздо. Сейчас уже меньше 300 рублей есть, с доставкой.
экструдер лучше не трогать. Большие токи — это слабое место драйверов Trinamic. Я постоянно сталкивался с тем, что TMC2130 при проталкивании пластика начинает греться, драйвер сокращает ток — и шестерня начинает щёлкать впустую на месте.
На экструдер можно ставить DRV8825 без «micro-stepping». «Поёт» он только в half-step и прочих «дробных» режимах, поэтому вы его не услышите. Зато пруток будет пропихивать всегда без запинки.
Шум драйверов Trinamic можно оценить по этому видео (сравниваю с DRV8825):
У меня TMC2130, они управляются по SPI, а не по последовательному порту, как у автора. Лучше их не программировать «на века», а давать прошивке принтера самостоятельно решать, какой ток и какой режим выбрать/ В этом случае драйвер знает, когда ему лучше включить режим CoolStep и пусть поработать громче, зато не сорваться и не пропустить шаг, испортив печатаемую деталь.
Вообще-то могут. У меня с 2130 уплыл радиатор на 4 мм, чип сгорел. Теперь со всех радиаторов соскрёб родной клей, отполировал «пятки» наждачкой, посадил на термопасту и по бокам зафиксировал термоклеем.
Ну да. Анодирование. Но есть закон Мерфи, его никто не отменял:
Если какая-нибудь неприятность может случиться, она случается.
Из всех неприятностей произойдёт именно та, ущерб от которой больше.
Если четыре причины возможных неприятностей заранее устранены, то всегда найдётся пятая.
Предоставленные самим себе, события имеют тенденцию развиваться от плохого к худшему.
На самом деле, для борьбы с шумом достаточно поставить 2208 на оси X и Y. Ось Z работает мало (постоянно она едет только при поиске нуля или калибровке), а экструдер — в общем, и так не слышно. В результате, одним комплектом 2208 можно обесшумить целых два принтера. :-)
Все пишут, что TMC2208 можно использовать для составления карты стола или установки 0 по оси Z, путем втыкания сопла экструдера в стол. Это теория? Marlin 2 можно научить так делать? Я что-то не могу найти в сети таких данных!
Это теория. Чтобы сработал StallGuard, надо довольно сильно стучаться в стол, вы так сопло завальцуете быстро.
Возьмите такой датчик — aliexpress.ru/item/4000216781306.html В Marlin2 включите режим усреднения по 3-4 замерам, выставьте низкую скорость тестирования, нахлобучьте датчик на сопло и будет вам счастье.
У меня в итоге получилась такая последовательность команд:
; M111 S38 ; Debugging: show LEVELING, ERRORS, INFO
M111 S4 ; Debugging: show only ERRORS
G29 D ; DE-activate the UBL System.
G29 P0 ; Zero mesh data.
G28 ; Home XYZ.
G29 P1 ; Automated bed probing.
G29 P3 ; Extrapolate values to the surrounding unpopulated areas.
G29 S ; Save UBL mesh points to EEPROM.
G29 W ; Displays valuable UBL data.
M420 V T1 ; Print mesh in CSV format (Excel)
G29 S ; Save UBL mesh points to EEPROM.
G29 F 10.0 ; Set Fade Height for correction at 10.0 mm.
G29 A ; Activate the UBL System.
M420 S ; Display bed leveling state
M500 ; Save to EEPROM
M501 ; Read back in saved EEPROM.
M503 ; Report settings
А какова реальная польза от компенсации? Неужто на принтерах настолько неровные столы? Просто на своём я заметил больше вреда от этого, чем пользы, хотя у меня всего по 3 точкам, компенсация наклона стола, так сказать. Во-первых, затраты времени на автокалибровку. Во-вторых, постоянная работа мотора оси Z, добавочный шум, затраты электричества, износ винта и направляющих. В-третьих, у меня очень древний принтер- Printrbot Simple Metal, с консольной осью Y, которую поднимает винт оси Z и проверив движение каретки Y по оси Z с помощью часового индикатора, обнаружил запаздывание- т.е. при небольшом повороте винта, на 0.1 мм по высоте, каретка поднимается не сразу на эту высоту, а через пару- тройку таких «шагов». Я думал это люфт пары гайка-винт, оказалось подклинивали линейные подшипники и «играла» пружинная муфта мотор-винт. В результате разные дефекты печати, связанные с неверной высотой слоёв вылазили. Устранил вкидыванием стального шарика в муфту между винтом и валом мотора, и отключением автокалибровки, так как гарантии, что при перемещении вниз подклинивания не будет и муфта не будет растягиваться у меня нет.
Теперь я просто выставляю стол поровнее, если есть необходимость, а небольшой избыток экструзии на первом слое, нивелирует небольшие неровности поверхности стола.
Прошу простить, что не по теме, но может кто подскажет? Есть потребность в приобретении шагового(?) двигателя. От него требуется поднимать нишу весом 10-12 кг на высоту 1 метр за секунд 5-10. Очень буду благодарен за помощь и ссылку.
Для тех кому драйвер нужен не для принтера, а для своей поделки оставлю заметку:
Использовал TMC2100. Из ожиданий — ну ещё бы, аппаратное прореживание до 1/256, всё тихо, плавно и без заклинивания.
По факту оказалось, что стабильность импульсов шага должна быть предельно высокой, иначе эта интерполяция начинает дикое вытворять. Т.е. разгон не прокатил от слова совсем. Ну и т.п. гадости.
Так что имейте в виду — чудес этот драйвер не даст.
Пока лучшее (удобно оказалось по ряду причин) что я использовал — DRV8825, которому программно подстраивал дробление шага в зависимости от желаемой скорости.





Брал версию v2.1 комплект из 6шт. 174.28 юаня = 25.4$. Сейчас версия v3.0 комплект из 6шт можно купить за
201.00¥ = 29.37$
Греются они одинаково, если правильно настроить токи при работе в UART. Это вам не 2130 кипятковый.
Садитесь, двойка вам.
А автору двойку за то что фюзтеч купил 1.2, а не бигтри 3.0.
это TMC2208 V 3.0 от BigTreeTech?
Чем они в данном случае лучше и за что автору двойка?
Vref для A4899 и для TMC2208 рассчитываются по разному и имеют разные значения. И кроме этого зависит от зависит от номинала токоизмерительных резисторов, установленных на плате драйвера — Rsense
Просто смотрим на паспортные характеристики мотора (у моих, например, рабочий ток — 0,8А) — и соответственно выставляем в auto0.gcode, который исполняется при включении принтера.
А программно если только подкорректировать, при необходимости.
Ну и ТС пишет о том, что собрался скопировать Vref с A4899 на TMC2208.
А у Вас Анька? Раз моторы на 0,8 стоят. Или китайцы их всюду впаривают…
На экструдер можно ставить DRV8825 без «micro-stepping». «Поёт» он только в half-step и прочих «дробных» режимах, поэтому вы его не услышите. Зато пруток будет пропихивать всегда без запинки.
У меня TMC2130, они управляются по SPI, а не по последовательному порту, как у автора. Лучше их не программировать «на века», а давать прошивке принтера самостоятельно решать, какой ток и какой режим выбрать/ В этом случае драйвер знает, когда ему лучше включить режим CoolStep и пусть поработать громче, зато не сорваться и не пропустить шаг, испортив печатаемую деталь.
нет, не «соплями», а теплопроводящим клеем.
Если какая-нибудь неприятность может случиться, она случается.
Из всех неприятностей произойдёт именно та, ущерб от которой больше.
Если четыре причины возможных неприятностей заранее устранены, то всегда найдётся пятая.
Предоставленные самим себе, события имеют тенденцию развиваться от плохого к худшему.
Это пять :)))
Сейчас по классике жду ноктовские кулера и пластиковые линейники.
Возьмите такой датчик — aliexpress.ru/item/4000216781306.html В Marlin2 включите режим усреднения по 3-4 замерам, выставьте низкую скорость тестирования, нахлобучьте датчик на сопло и будет вам счастье.
Карту стола составляют так — marlinfw.org/docs/gcode/G029-ubl.html
У меня в итоге получилась такая последовательность команд:
В configuration.h ищете строчки:
и второй параметр меняете на что-то совсем черепашье, типа 50 мм/мин.
Раскомментируйте и замените 2 на 4 в:
Раскомментируйте
Значение в строке
Можно сильно увеличить. Этот параметр влияет на количество точек по одной оси на столе, которые будет прощупывать принтер. У меня вовсе 24 стоит.
И будет у вас идеальная компенсация неровностей стола.
Теперь я просто выставляю стол поровнее, если есть необходимость, а небольшой избыток экструзии на первом слое, нивелирует небольшие неровности поверхности стола.
Если у вас не картезианская геометрия принтера — нужен
Правда, есть вероятность, что скорость вас не устроит. Впрочем, то что вы хотите, скорее напоминает катапульту…
Ладно, подожду вдумчивых ответов.
Использовал TMC2100. Из ожиданий — ну ещё бы, аппаратное прореживание до 1/256, всё тихо, плавно и без заклинивания.
По факту оказалось, что стабильность импульсов шага должна быть предельно высокой, иначе эта интерполяция начинает дикое вытворять. Т.е. разгон не прокатил от слова совсем. Ну и т.п. гадости.
Так что имейте в виду — чудес этот драйвер не даст.
Пока лучшее (удобно оказалось по ряду причин) что я использовал — DRV8825, которому программно подстраивал дробление шага в зависимости от желаемой скорости.
А не мог бы файликом угостить на обдув драйверов? Тож поменял и стал вопрос по обдуву) сам просто ещё не умею рисовать(((