Здравствуйте, уважаемые читатели! В этой статье хочу поделиться материалом по сборке гоночного FPV коптера на базе рамы, рассчитанной на установку пятидюймовых пропеллеров – LDARC Kingkong KK 5GT. Статья выполнена в стиле пошаговой инструкции по сборке, может помочь начинающим пилотам, которые уже собирают или планируют собирать квадрик. Неравнодушных к теме FPV полётов, прошу под кат.
Поставляется комплект рамы в картонной упаковке. Внутри все элементы рамы запакованы в индивидуальные пакеты и имеют наклейки с маркировкой.
Дополнительные фото
В комплекте есть все, что потребуется для сборки, даже стяжки и пропы 5045, а вот стойки для крепления регуля и полётника положить забыли.
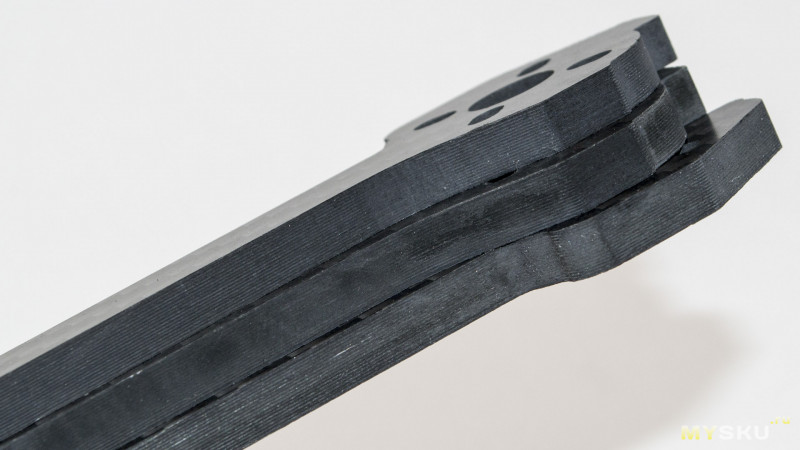
Качество карбона отменное, структура многослойная, углеткани явно не жалели.
Распил заготовок ровный, но на некоторых деталях нашёл небольшие заусенцы по краю реза.
Толщина лучей – 5 мм.
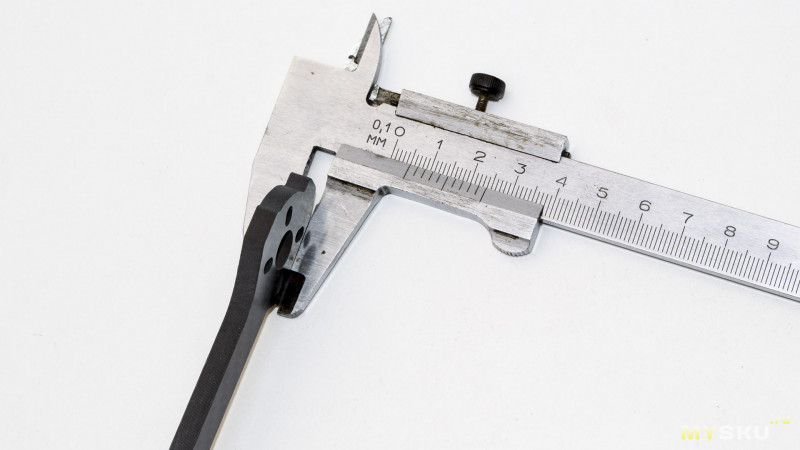
Ширина лучей всего – 11 мм, отдельные регуляторы на каждый мотор, конечно, поставить можно, но рамка изначально рассчитана на установку регулятора 4 в 1.
Остальные карбоновые детали толщиной – 2 мм. Кроме планки для крепления антенны видеопередатчика, она толщиной – 1.5 мм.
Начинаем собирать раму. Лучи рамы сменные, при сильном краше можно купить новый комплект из двух лучей.
Центральная часть рамы имеет слоёную конструкцию, которая скрепляется закладными гайками и болтами М3*6. Конструкция весьма мудрёная, непонятно, зачем было использовать закладные куда проще стянуть обычной парой – болт плюс гайка.
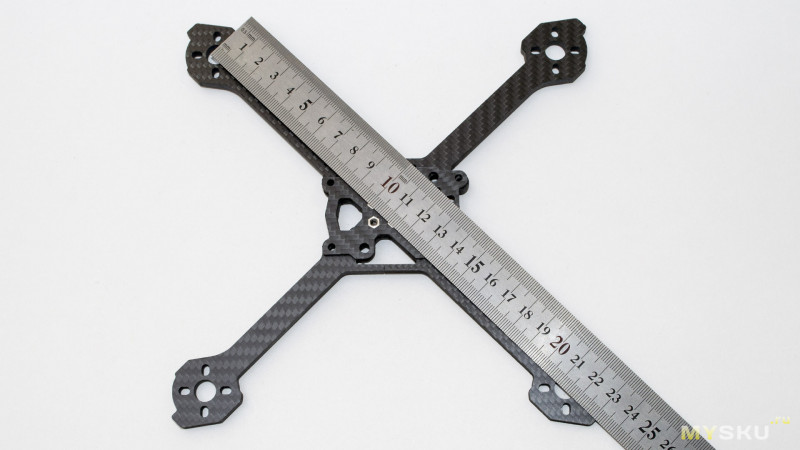
Получилось основание для монтажа моторов и электроники. Диагональ по центрам моторов – 213 мм.
Форма основания – симметричный крест.
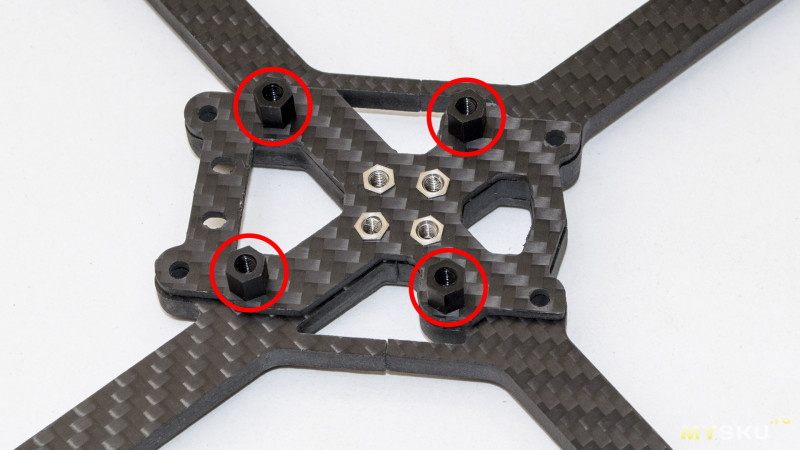
Монтируем пластиковые стойки, на которые будем закреплять регулятор и полётный контроллер (стойки в комплект рамы не входят). Я использую вот такой наборчик пластикового крепежа – Suleve M3NH1 M3 Nylon Screw.
Длинными анодированными болтами M3*14 к основанию рамы прикручиваем металлические боковины. После установки боковин рама приобретает отличную жёсткость.
Ставим на место верхнюю деку.
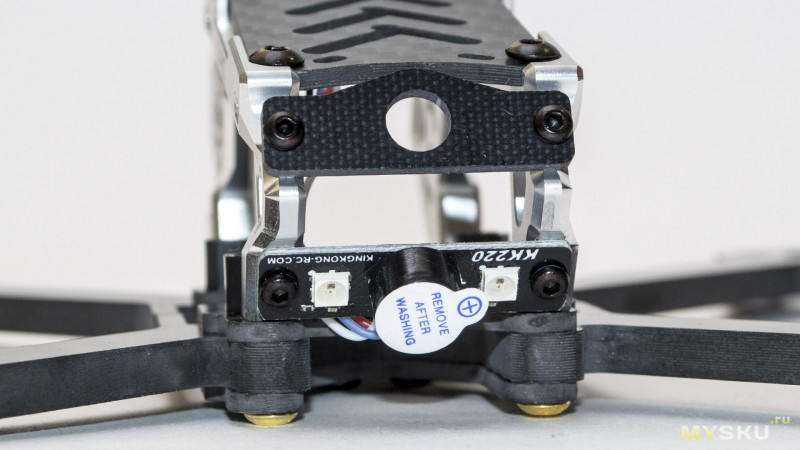
Ставим гнездо под антенный вывод. А вот плату с пищалкой и светодиодами ставить не рекомендую. Жить такая пищалка будет – до первого жёсткого куста. Пищалки я обычно прячу внутрь рамы, она часто помогает отыскать модель в густой траве, и летать без неё не рекомендую.
Рама готова:
Вес пустой рамы – 106 г. На мой взгляд, многовато для рамы, у которой практически нет башни и очень тонкие лучи. Но тут основной вес набегает за счёт боковинок из алюминиевого сплава и слоеной конструкции центральной части.
Для сборки квадрика, кроме вышеупомянутой рамы, буду использовать: приёмник – FrSky XSR для аппаратуры TARANIS; курсовую камеру (можно использовать только мини формат) – Foxeer Monster Mini Pro; моторы – DYS SE2205 PRO 2300KV. Сразу хочу предупредить, рама KK 5GT предназначена для установки только мини-версий курсовых камер, или микро, через самодельную проставку. Ширина проёма под камеру – 22.5 мм.
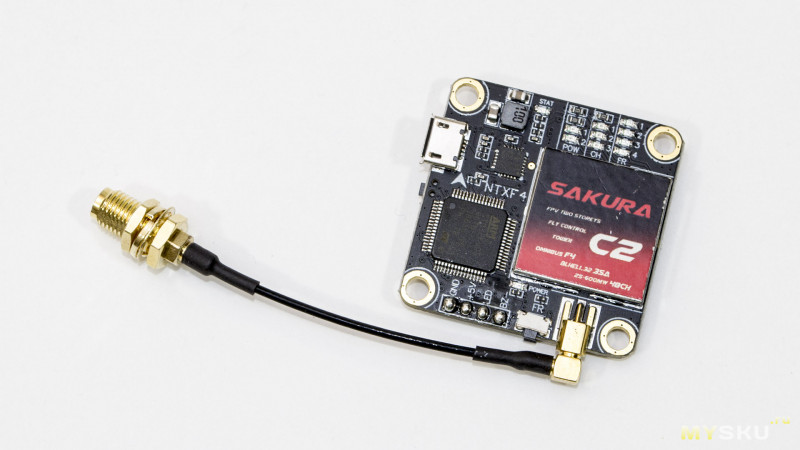
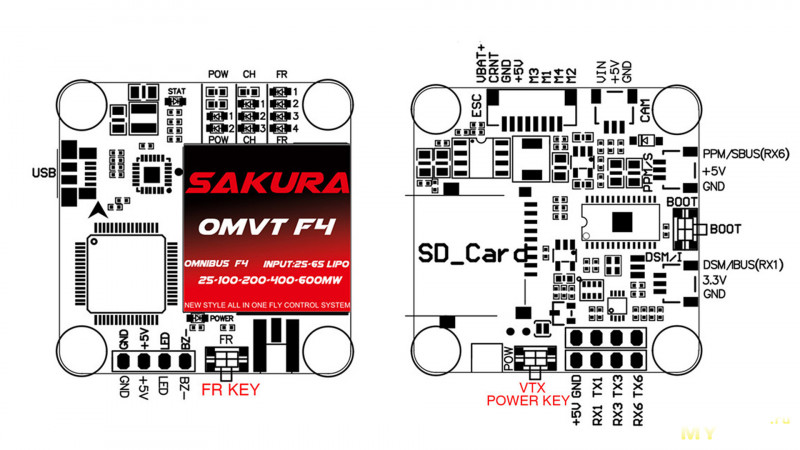
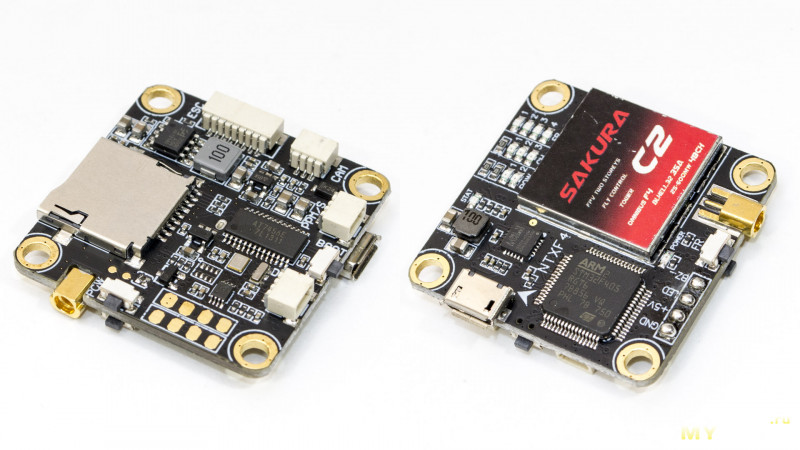
В качестве полётного контроллера и регулятора буду использовать комбо – AuroraRC C2 Flytower OMVT F4. В набор входят регуляторы 4 в 1 и полётник на процессоре F4, с интегрированным видеопередатчиком.
Описание полётного контроллера
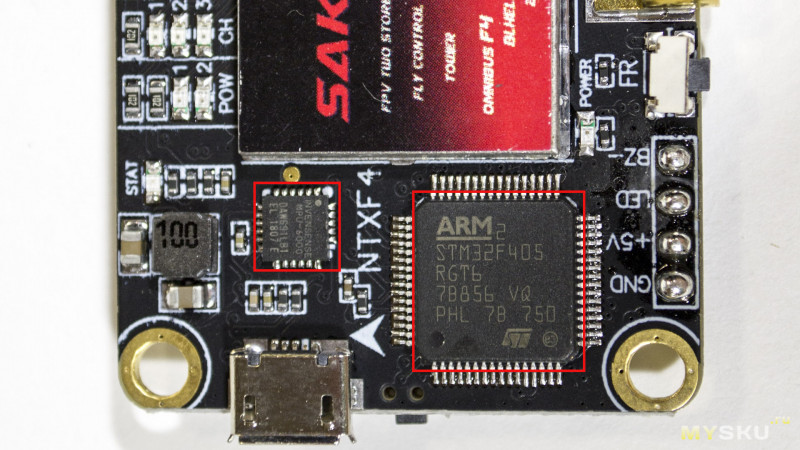
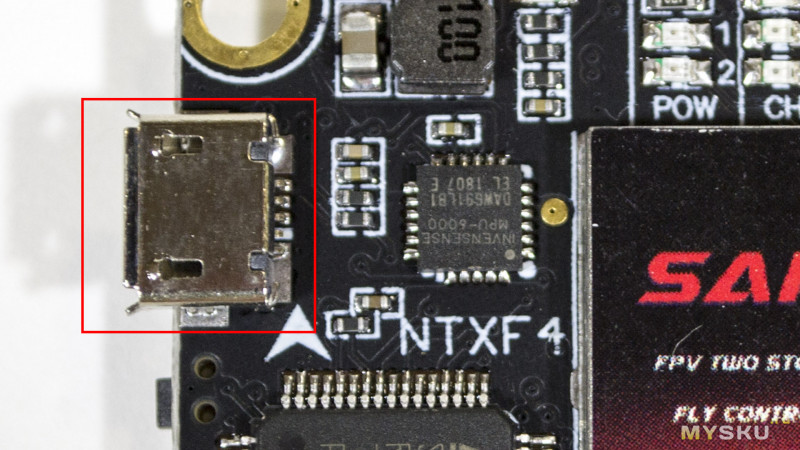
Сразу хочу предупредить, так как на полётный контроллер интегрирован видеопередатчик, подключать его следует только с установленным пигтейлом и подключенной к разъёму SMA антенне. В противном случае возможен выход передатчика из строя. Данный ПК (ПК — полётный контроллер) по сути, один из многочисленных клонов OMNIBUS4SD, на который установили видеопередатчик. Подобных решений на торговых площадках Китая просто огромное количество, и данный контроллер известен как – NTXF4-FC. Вот только наклейку сменили, но надпись на плате затереть забыли.
На полётном контроллере применена вполне стандартная для таких изделий связка. Процессор STM32F4 и сенсор MPU-6000.
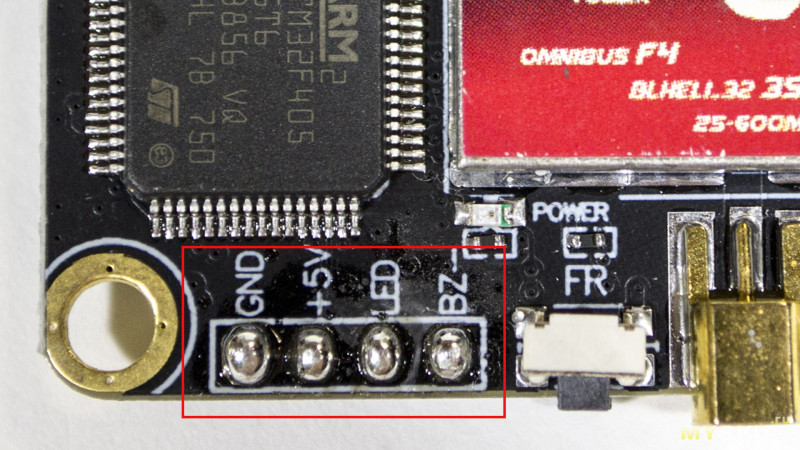
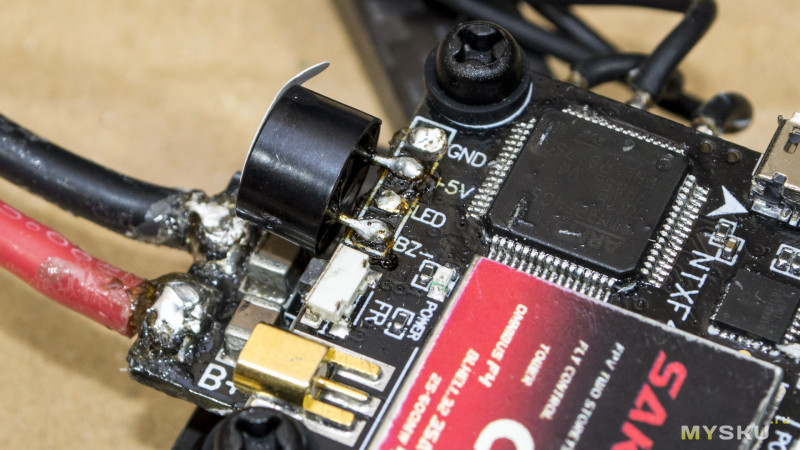
На плате присутствуют контактные площадки для подключения пищалки и габаритной светодиодной подсветки.
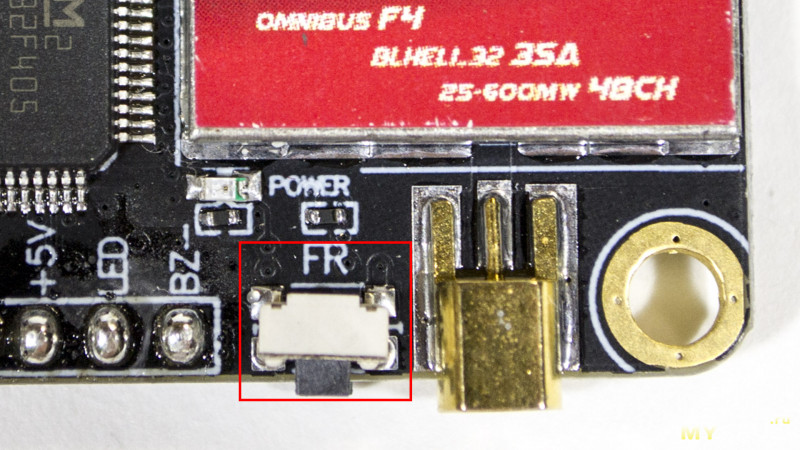
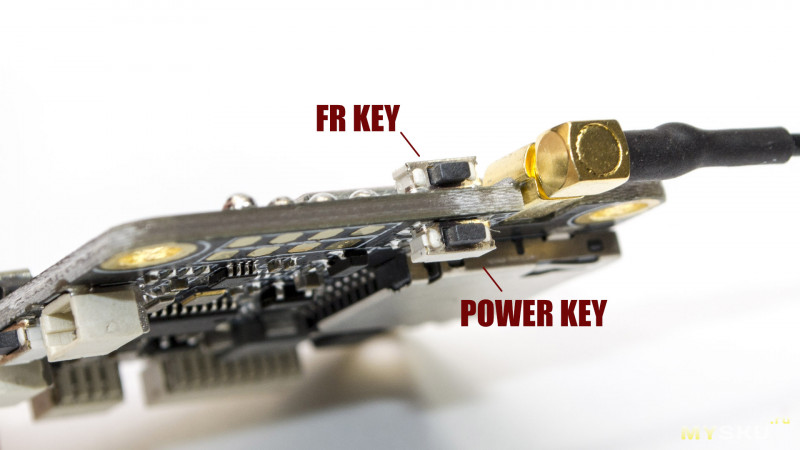
Рядом с антенным разъёмом расположены две кнопки управления видеопередатчиком. Кнопка FR переключает частотную сетку и канал, кнопка POW – мощность.
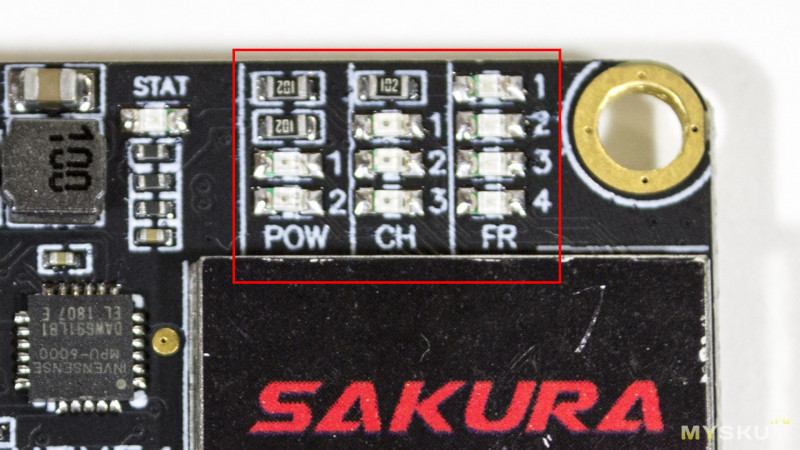
Для индикации установленной частотной сетки, канала и мощности видеопередатчика применены SMD светодиоды, расположенные в трёх группах, POW, CH, FR.
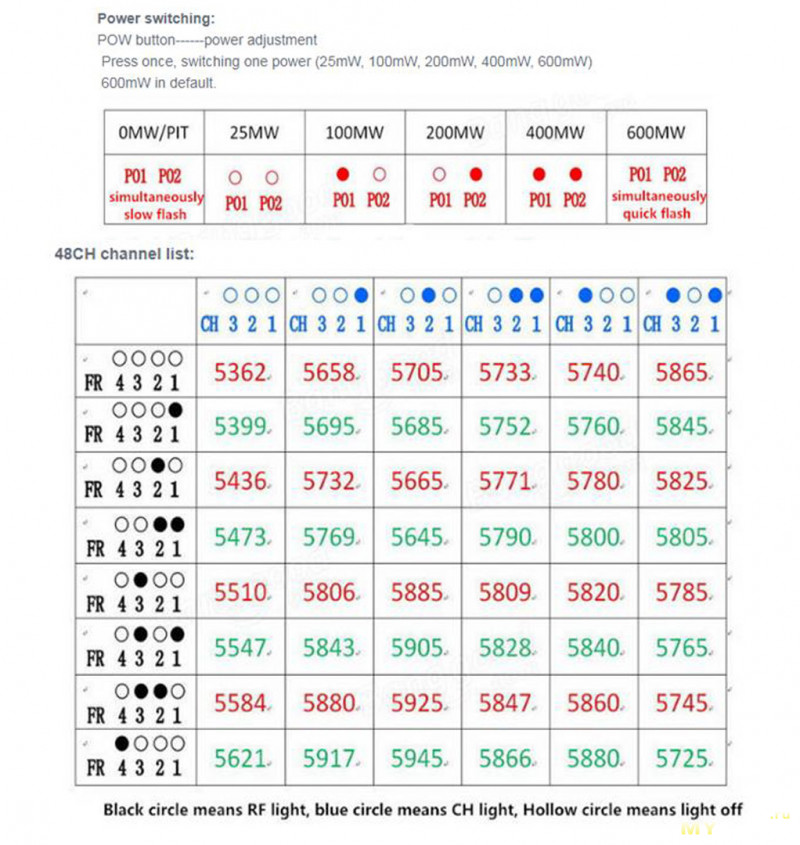
Короткое нажатие кнопки FR переключает каналы, длительное нажатие (2 секунды) переключает частотную сетку. Однократное нажатие на кнопку POW регулирует мощность –25mW, 100mW, 200mW, 400mW, 600mW.
Для подключения к ПК и настройкам в программе betaflight на полётном контроллере установлен порт – micro usb.
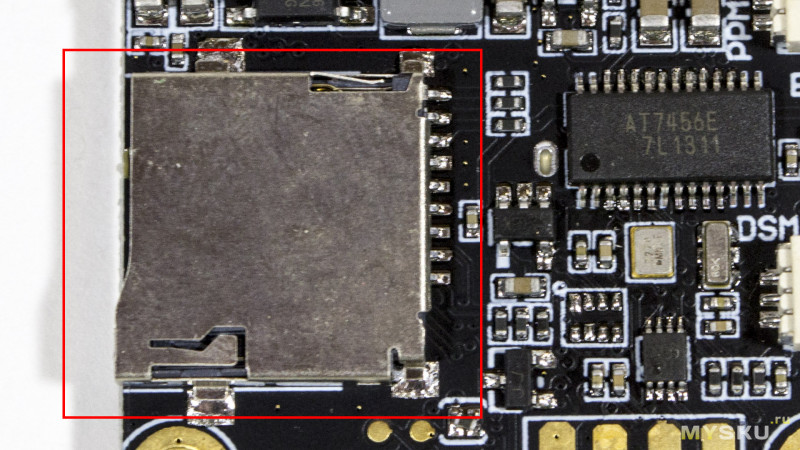
Контроллер оборудован слотом для карточек памяти формата micro sd. При активации логов в прошивке betaflight, становиться доступным запись полётных параметров на карту памяти. Но обычно данной опцией никто не пользуется.
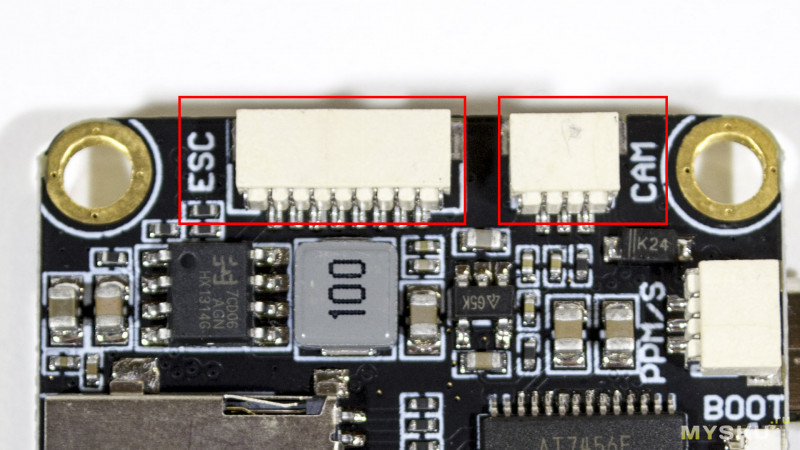
ESC – порт для подключения полётного контроллера к регулятору. САМ – порт для подключения курсовой камеры.
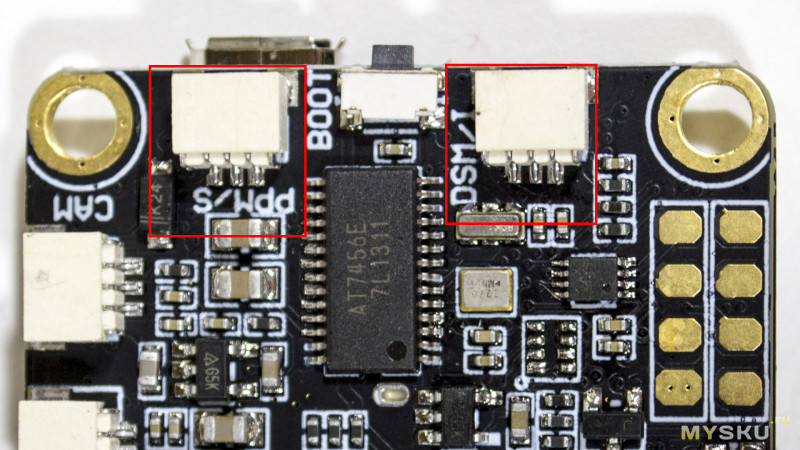
PPS/S – для подключения приёмников по шине SBUS. DSM/T – порт для приёмников spectrum.
Контактные площадки портов периферии. Эти порты могут управлять дополнительным оборудованием на коптере, например, камерой – Runcam Split.
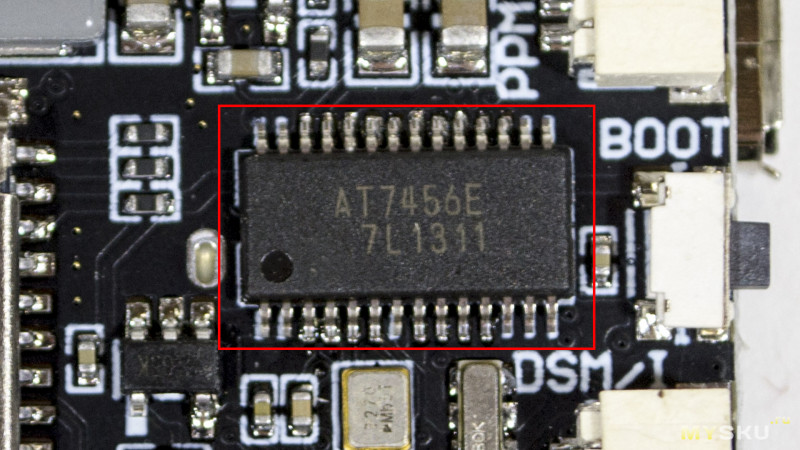
В качестве чипа OSD на данном полётном контроллере применена микросхема AT7456E. Ссылка на даташит.
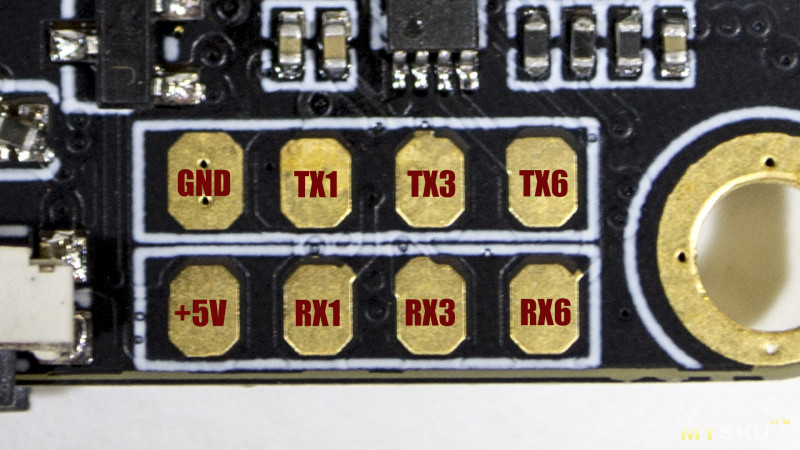
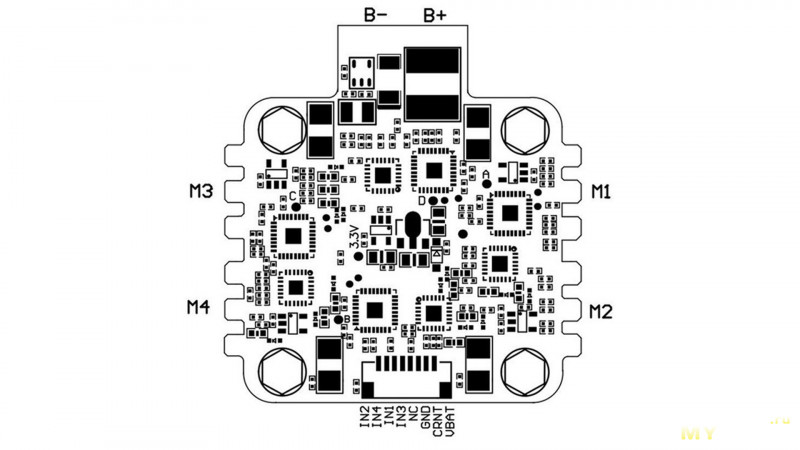
Распиновка полётного контроллера:
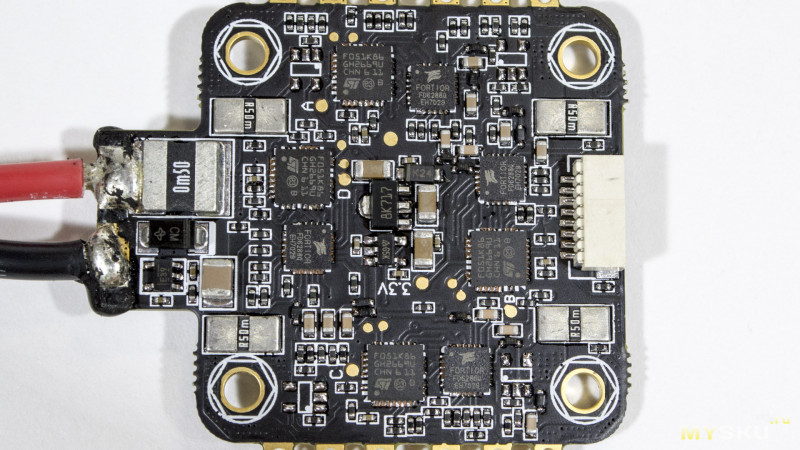
Описание регулятора 4 в 1
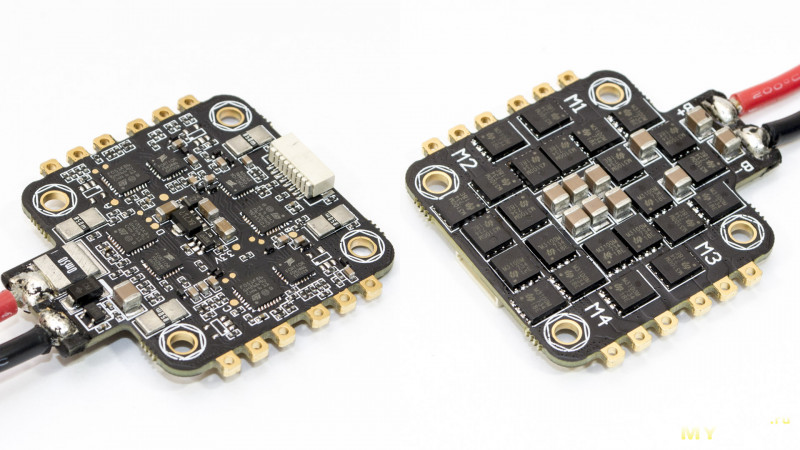
Плата регулятора интегрирует в себя четыре 32-х битных регулятора с поддержкой DSHOT1200. К плате регуляторов можно подключать аккумуляторные батареи 3-6S. Пиковый кратковременный ток нагрузки – 45А (10 секунд) для каждого из четырёх регуляторов. На плате нет никаких надписей, которые могли бы пролить свет на её происхождение. На странице товара она значится как – Roptor BLHeli_32 35A ESC.
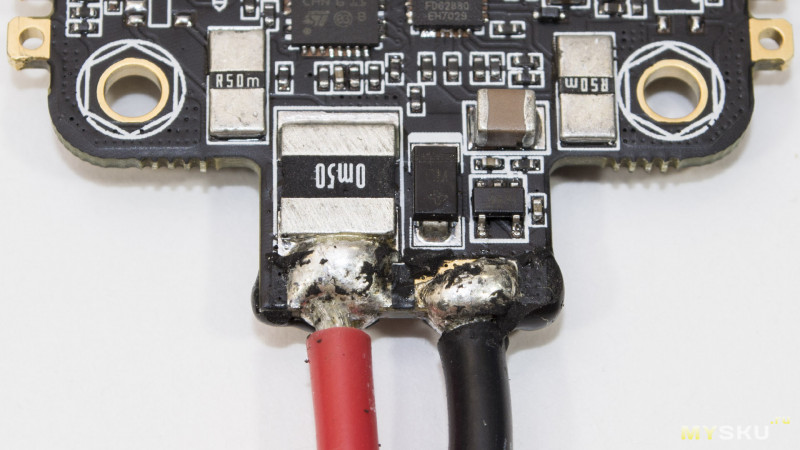
Изначально место пайки питающих проводов было залито чёрным компаундом. После его снятия под ним оказалась вполне приличная пайка. Если нет необходимости укорачивать провода, можно оставить как есть.
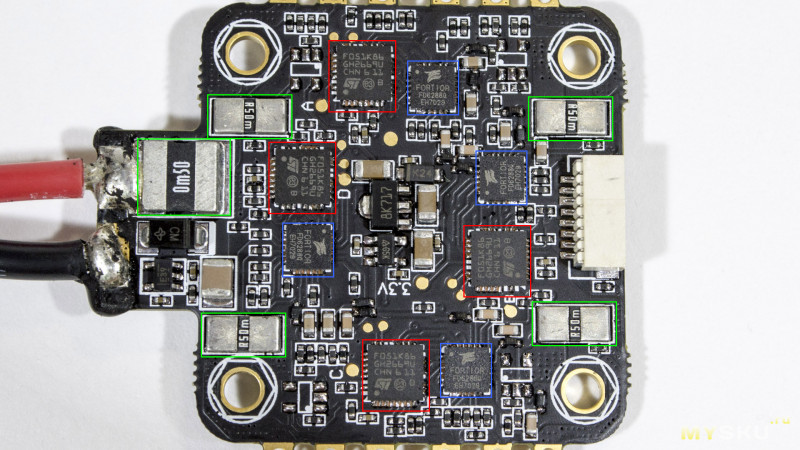
Мозгом регуляторов являются четыре 32-х битных процессора F051k86 – красный контур. В качестве драйверов регуляторов применены четыре FORTIOR fd6288q – синий контур. Зелёным контуром отмечены датчики тока, четыре датчика на каждый из регуляторов и один общий по шине питания.
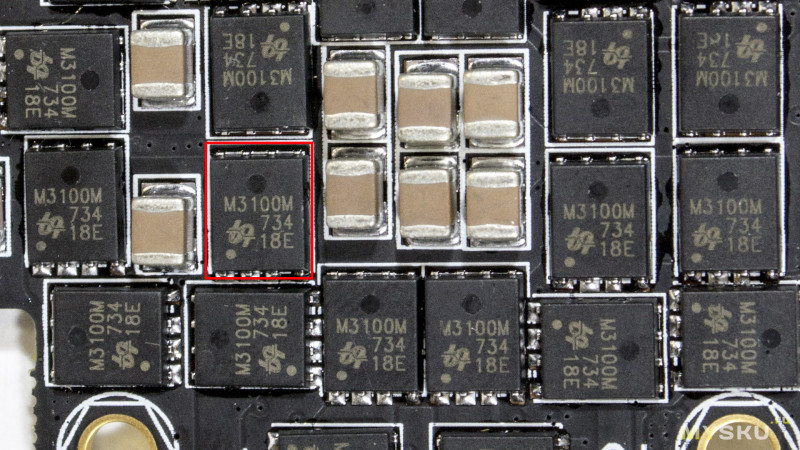
Силовые мосфеты – M3100M. К сожалению, никакой информации, про них я не нашёл. Подозреваю, что они рассчитаны на 30В и пиковые токи около 100А.
Распиновка регулятора:
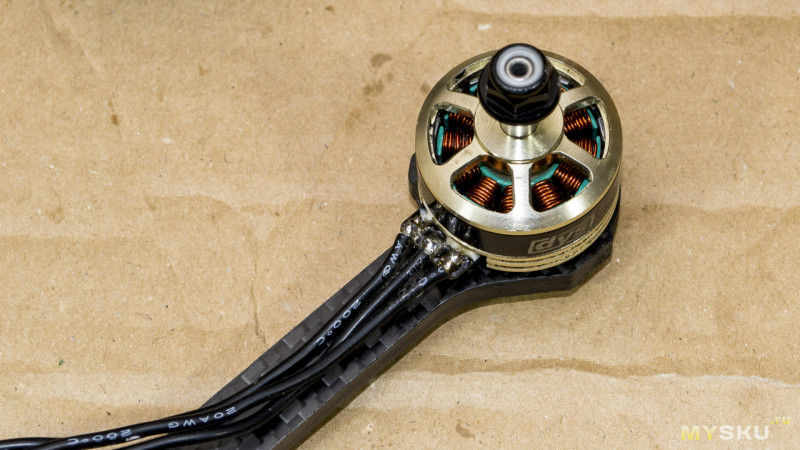
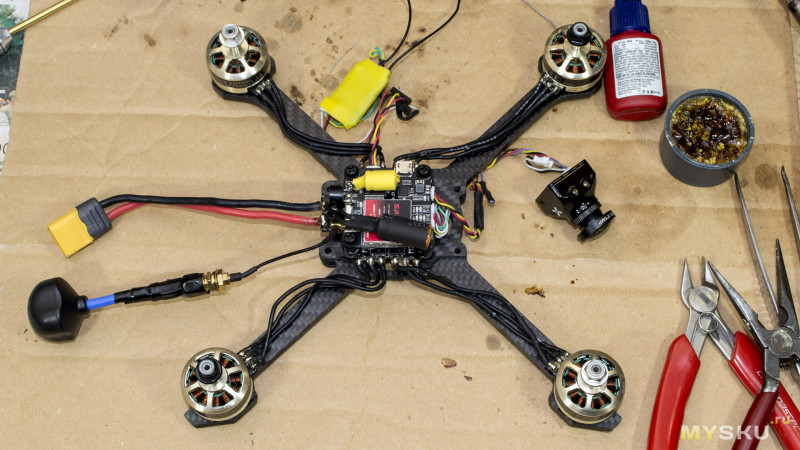
Приступим к сборке коптера. К лучам рамы прикручиваем все четыре мотора. Я креплю моторы на четыре болта, с использованием фиксатора резьбы.
Для подключения к регулятору я использую провода 20 AWG из комплекта моторов. Паяем провода сначала к моторам.
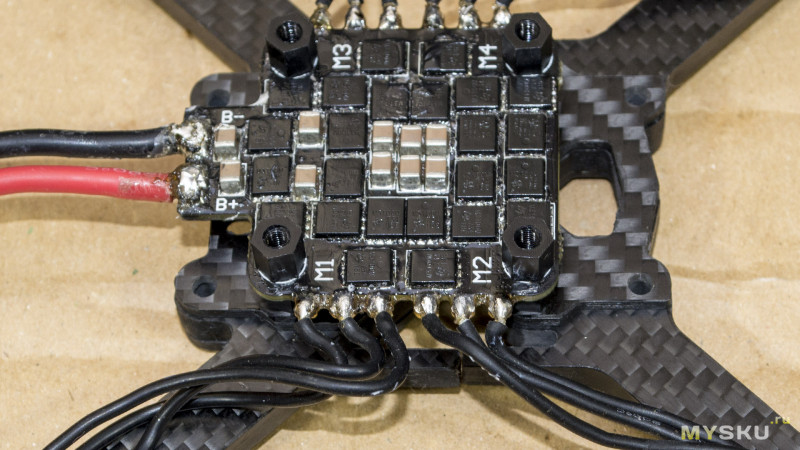
Потом к регулятору. Можно оставлять небольшой запас по длине, чтобы при обломе луча не вырвало провода вместе с монтажной платой из моторов.
К каким фазам, какой провод подключать значения особого не имеет и влияет только на направление вращения моторов. На этапе настройки можно поменять направление вращения моторов в программе blhelisuite32. Проверяем качество пайки, чтобы в полёте ничего не отвалилось.
Полётник буду устанавливать на силиконовые демпферы – HGLRC M3 Anti-vibration Washer Rubber Damping. Демпферы обеспечат виброразвязку гиры от вибраций на раме.
Затягиваем болты, закрепляющие полётник без фанатизма, иначе демпферы не будет работать.
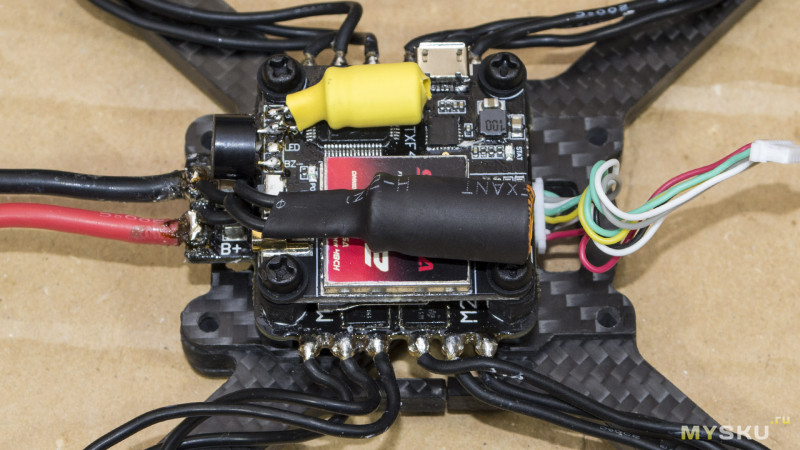
Чтобы не плодить лишних проводов, пищалку припаял непосредственно к контактам на полётном контроллере.
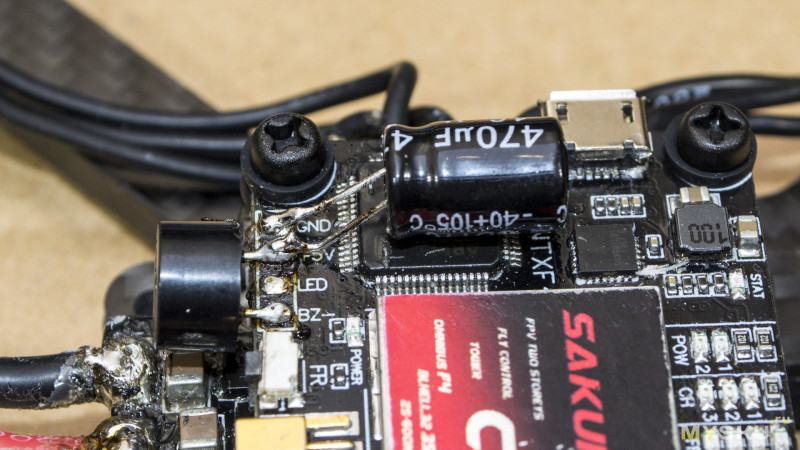
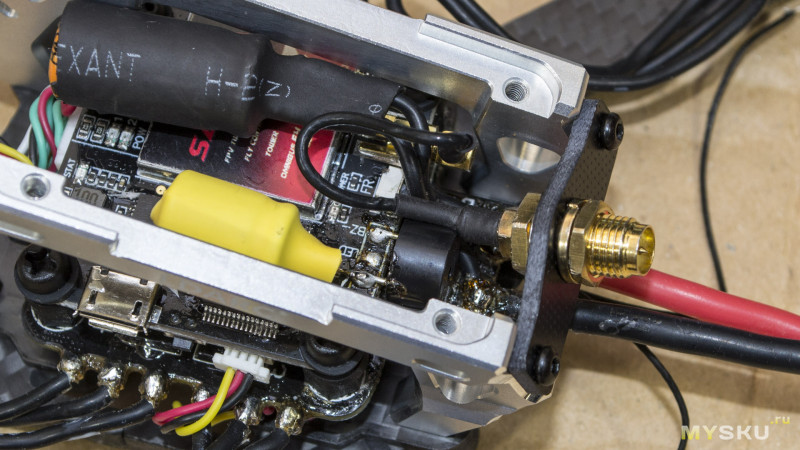
Для устранения помех на видео по шине 5V запаиваем электролит, мне под руку попался 470µF/16V, его и пришпандорил. Не забываем, потом все заизолировать термоусадкой и лаком пластик 71.
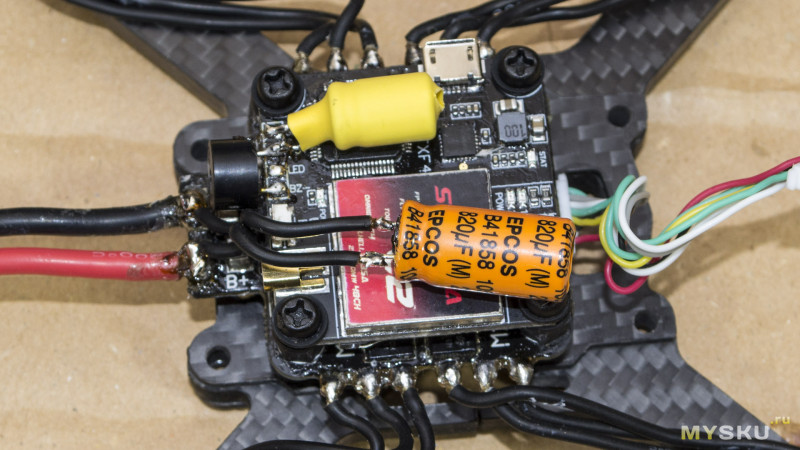
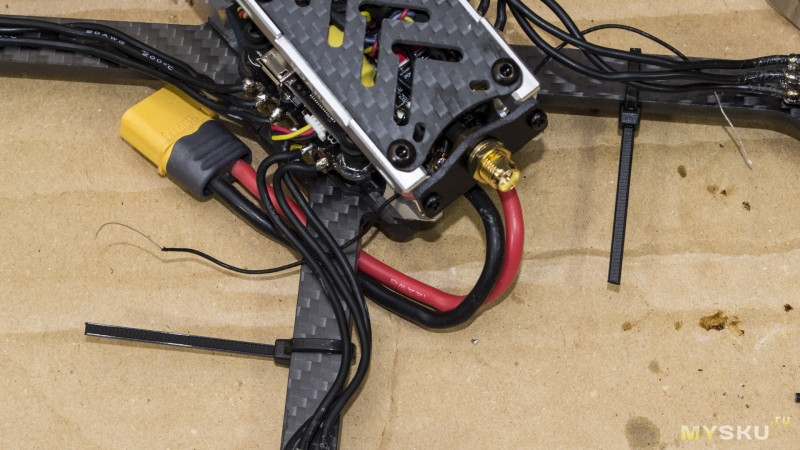
Электролит на 820µ/25V припаиваем на шину аккумулятора. Так как рама компактная, пришлось все делать на выносных проводах.
К полётнику подключаем все компоненты, включая антенну (без антенны сгорит видеопередатчик) и проверяем на работоспособность. Убедились, что все работает – можно окончательно заканчивать сборку.
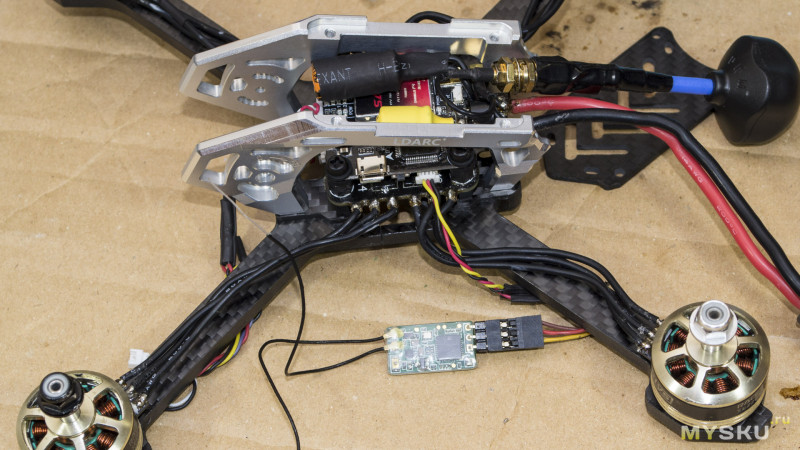
Тут выясняется один неприятный момент. Приёмник XSR не влезает в раму, ни под каким предлогом. Пришлось ставить более компактный Frsky XM+.
Для микроприёмника места вполне достаточно как снизу, так и сверху рамы.
Ставим пигтейль с разъёмом SMA, на который будет прикручиваться антенна видеопередатчика.
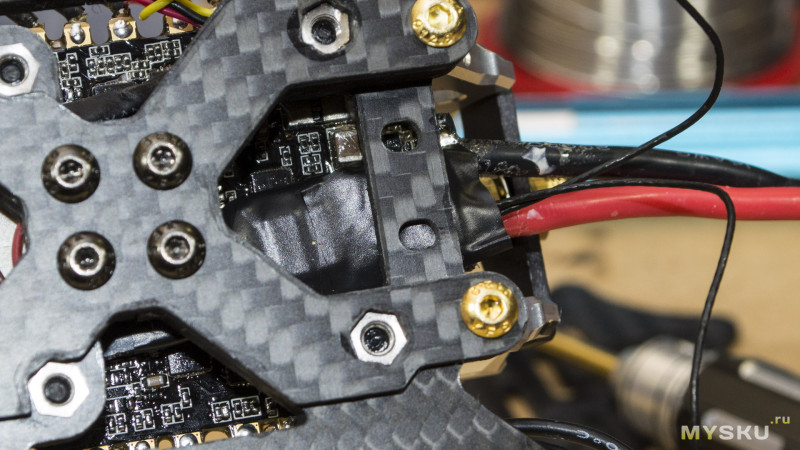
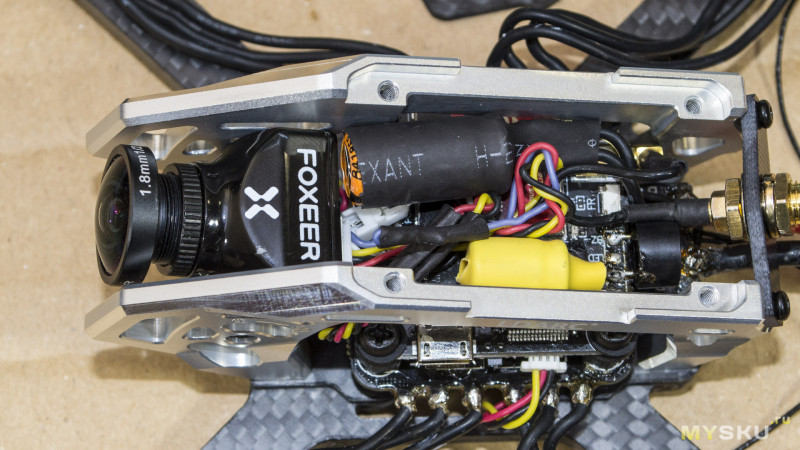
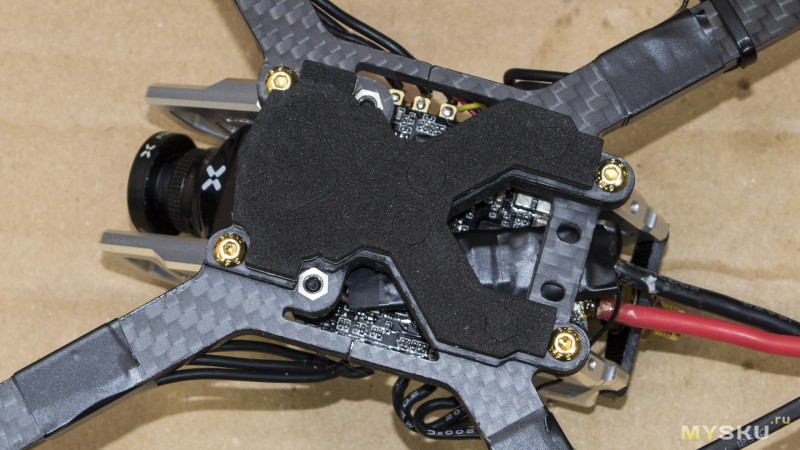
Устанавливаем курсовую камеру.
Рама рассчитана на использование камеры RunCam Swift Mini 2, поэтому верхние крепёжные отверстия немного не совпадают с фоксером. Но она и на двух болтах отлично фиксируется в раме.
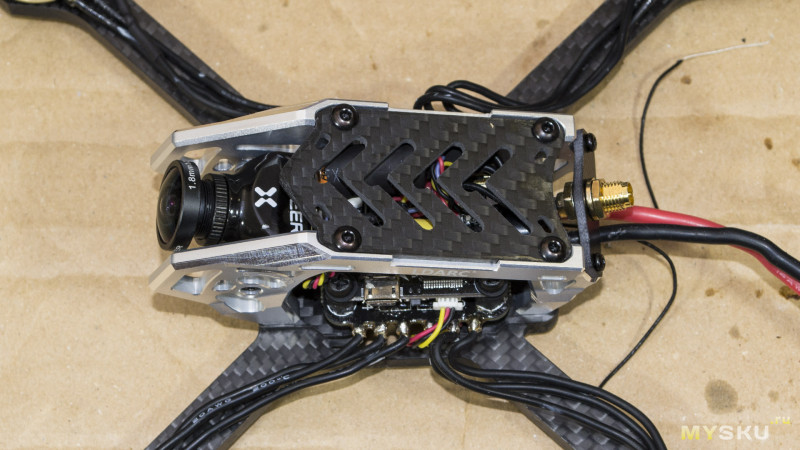
Теперь можно установить верхнюю деку рамы, на своё место.
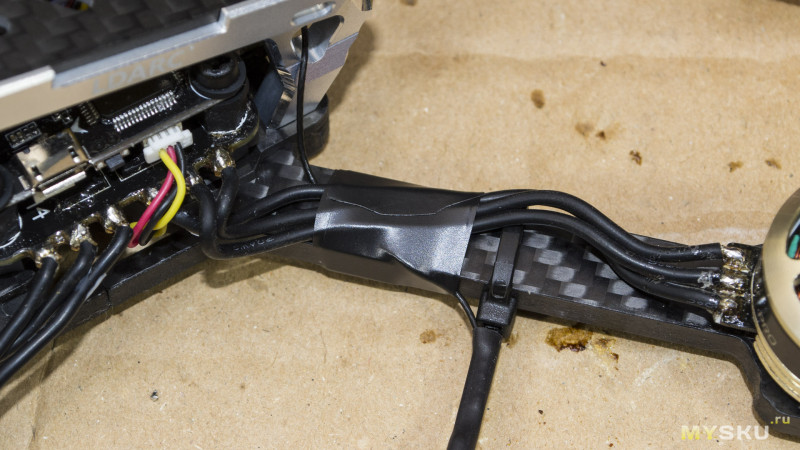
Усы антенн от приёмника XM+ закреплю на стяжках к лучам рамы.
Стяжками или изолентой фиксируем провода от моторов.
Приклеиваем комплектную мягкую прокладку для аккумулятора.
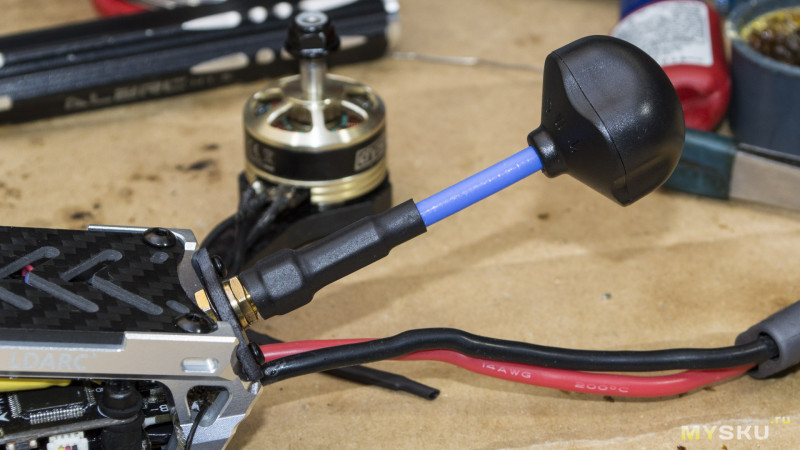
Прикручиваем антенну видеопередатчика к разъёму SMA.
Под регулятор продеваем стяжку-велкро для фиксации аккумуляторов.
В итоге получилось:
Вес квадрика без акума с пропами «трёшками» – 332 г. Если добавить 4S аккумулятор, то полётный вес будет в районе 490 г
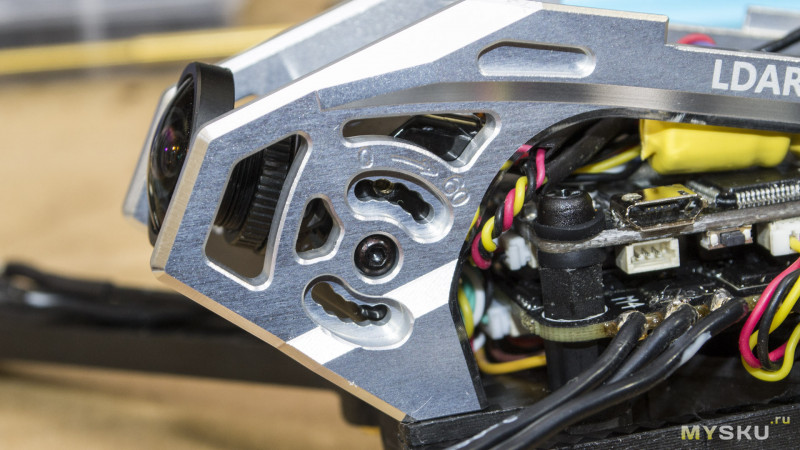
Верхняя дека имеет угол наклона около 30 градусов, что позволяет без проблем закрепить на ней экшн камеры.
Настройка
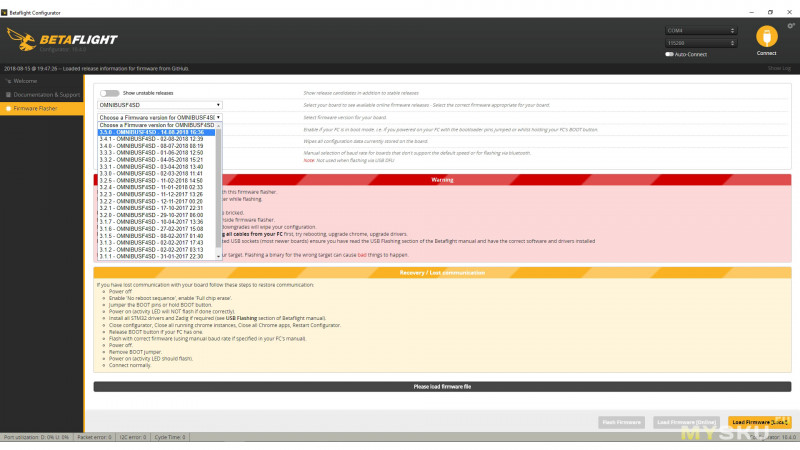
Прошивать полётный контроллер необходимо таргетом – OMNIBUS4SD. По умолчанию контроллер был прошит старой прошивкой 3.2.2 OMNIBUS4SD. Я обновил прошивку до стабильной версии 3.5.0.
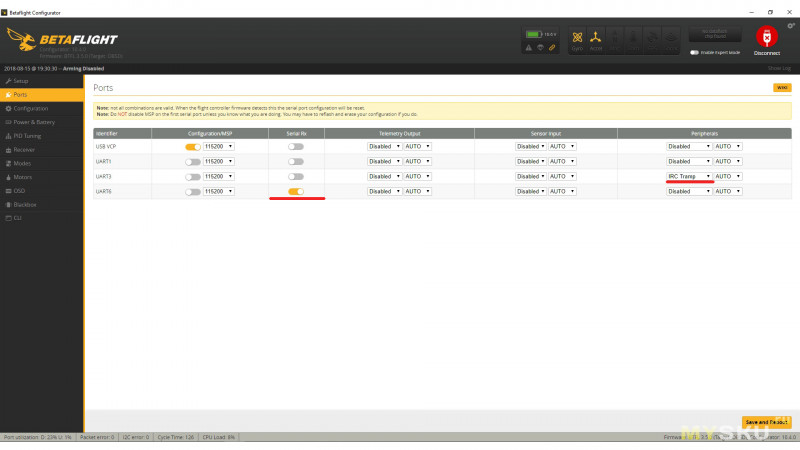
Для работы приёмника по шине SBUS активируем Serial RX на UART6. Для UART3 устанавливаем IRC Tramp – удалённое управление настройками передатчика.
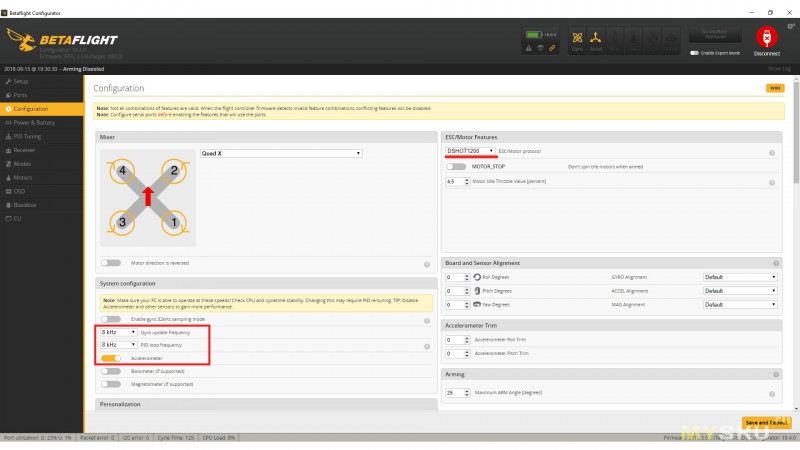
Если нет желания летать в режиме стабилизации, то отключаем акселерометр и устанавливаем максимально возможную частоту работы для процессора полётного контроллера.
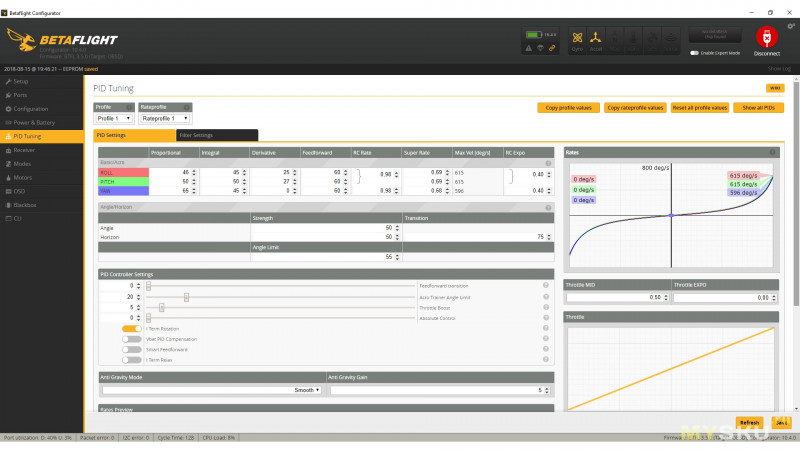
Для облёта настройки PID регулятора в программе оставил по умолчанию, единственное что добавил немного экспонент на основные каналы управления.
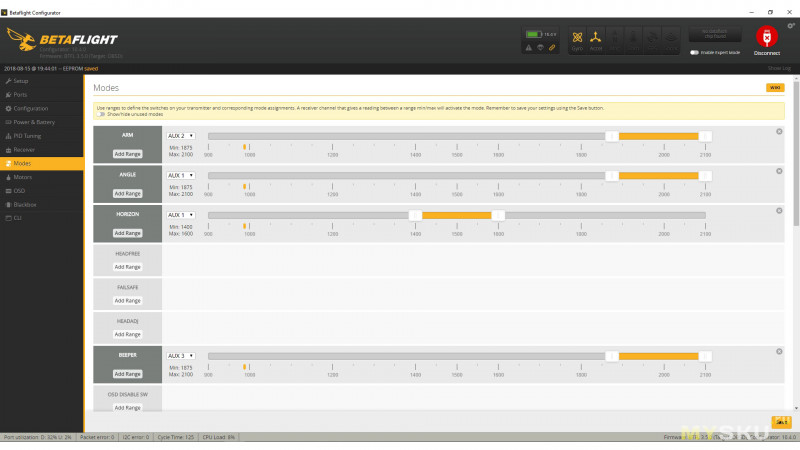
Устанавливаем полётные режимы на ваши любимые переключатели. Естественно, надо настроить ARM (активация коптера).
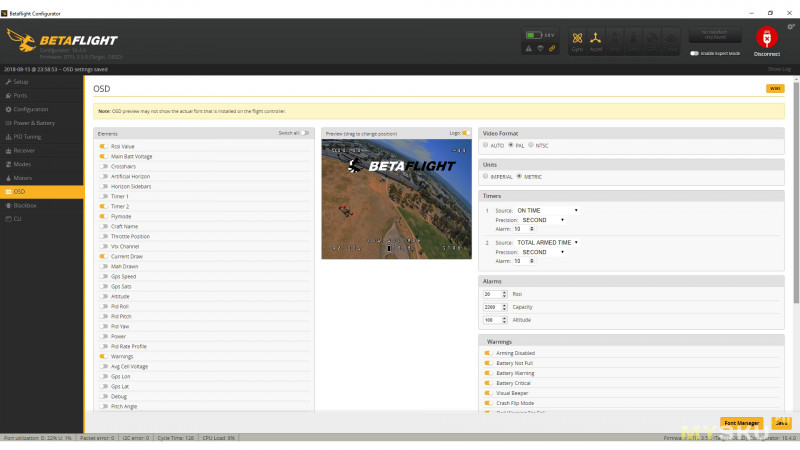
В настройках Betaflight OSD располагаем необходимые нам параметры на экране в соответствии с предпочтениями.
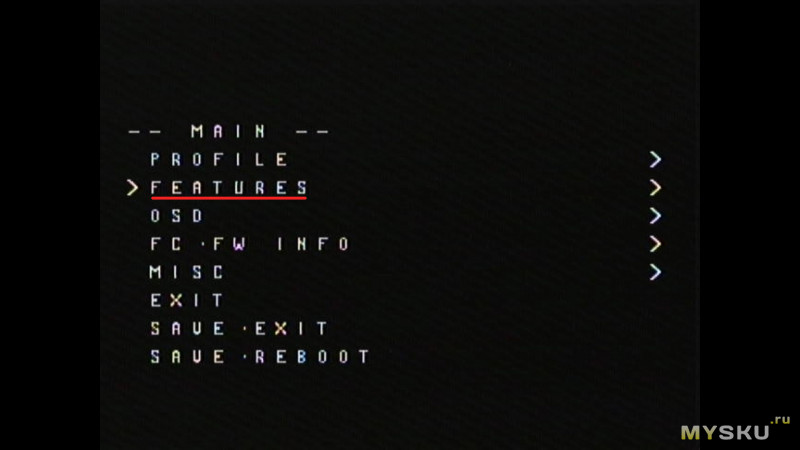
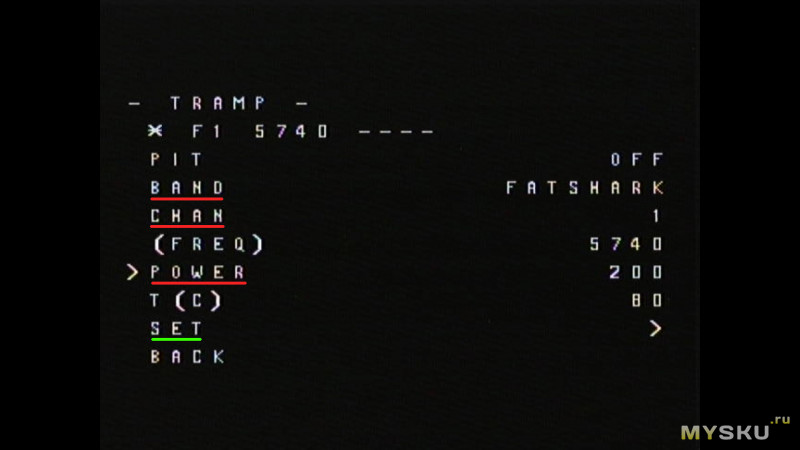
Несколько слов скажу про удалённое управление параметрами видеопередатчика через OSD меню Betaflight. Для входа в меню необходимо дизармить коптер, установить стик газа в положение 50%, стик PITCH вверх (UP), YAW LEFT и мы попадаем в экранное меню Betaflight. Переходим во вкладку FEATURES далее во вкладку UTX TR и оказываемся м меню TRAMP где можем менять частотную сетку, канал и мощность. После изменения настроек необходимо войти в пункт SET и подтвердить изменения YES.
Более наглядно меню управления передатчика продемонстрировано на видео:
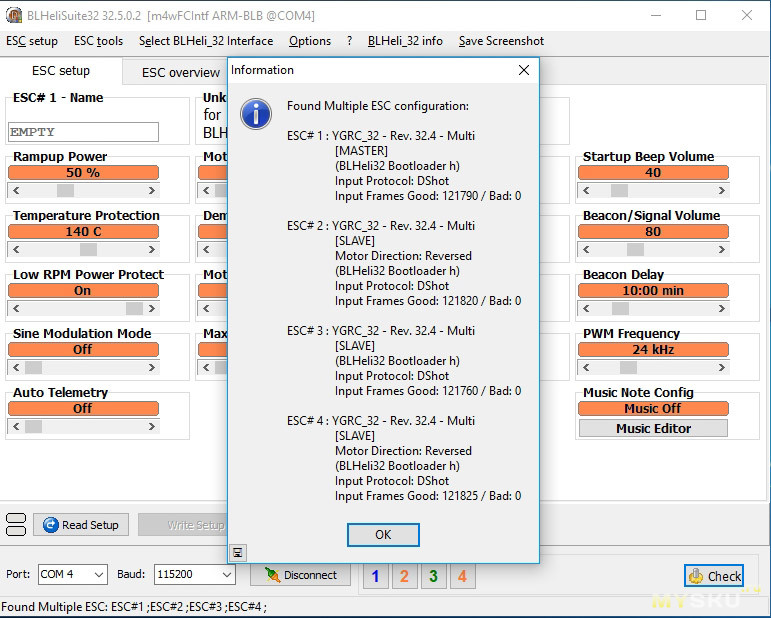
Программа для работы с 32-х битными регуляторами BLHeliSuite 32, нашла четыре регулятора YGRC_32, версия прошивки 32.4.
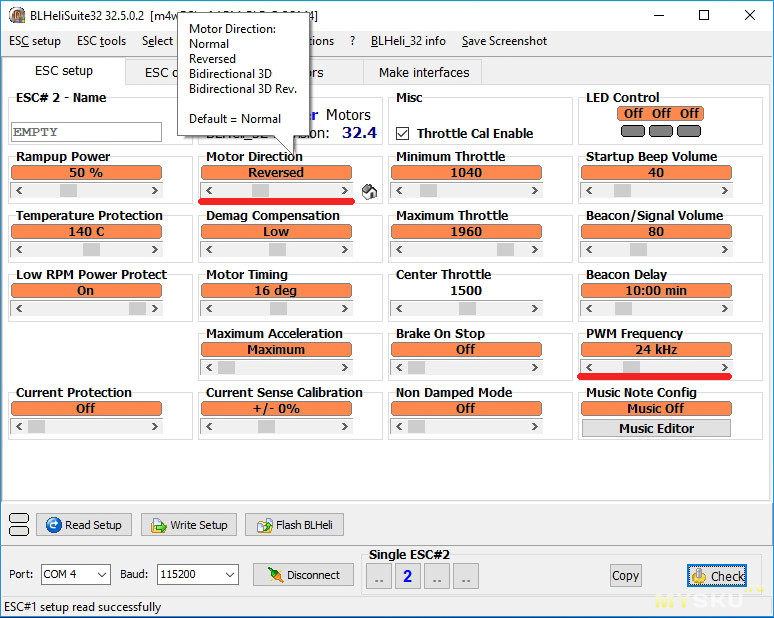
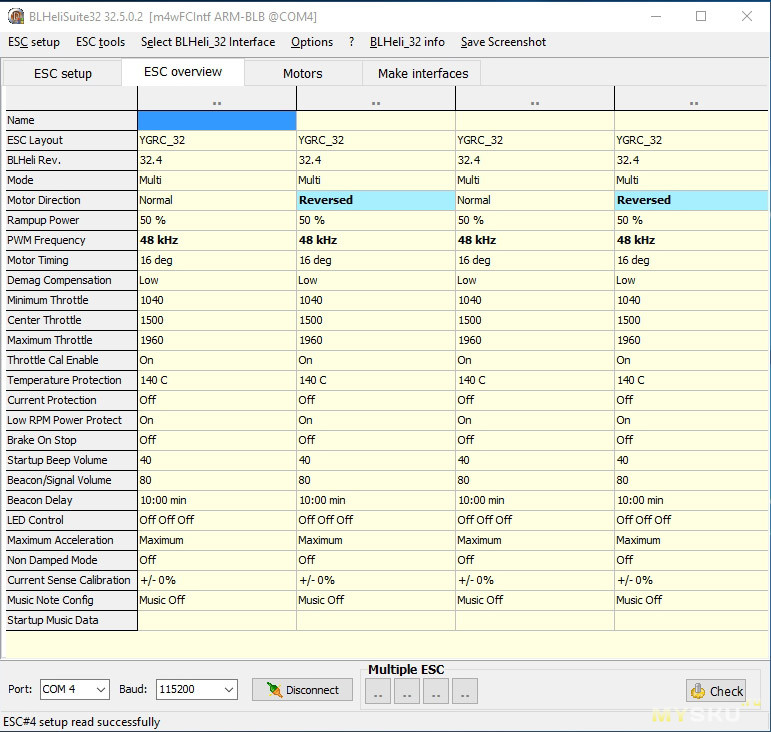
Для правильного вращения мне пришлось реверсировать два мотора, но можно этого и не делать, а поменять местами любые два провода от регулятора к мотору. Параметр PWM Frequency я установил в 48 kHz, это даст более «мягкое» управление электромоторами.
Мои настройки в BLHeliSuite 32:
Квад с таким сетом летит просто отлично. Облётывал в очень сильный и порывистый ветер, но такое впечатление, что порывов ветра квадрик просто не замечает. Летит как по рельсам.
В итоге. Рама для сборок вполне годная. Из плюсов: сменные лучи; хорошая жёсткость; низкий профиль (необходим для FPV гонок при прохождении ворот); хорошая комплектация (даже пропы положили). Что не понравилось – дороговизна самой рамы, вытекает их хорошего карбона, фрезерованных металлических боковин и ненужных пропов и стяжек в комплекте. Остальные придирки возникли из основного плюса – компактность. Место только под стек из двух этажей, курсовые камеры только формата мини, слишком узкие лучи для размещения отдельных регуляторов. Если не ставить электролиты и подыскать менее высокие стойки, то внутри без проблем можно разместить отдельный видеопередатчик и ещё место для приёмника останется. В целом – для сборок именно гоночных сетапов вполне рекомендую. Для полётов вокруг себя да около, лучше подыскать рамку попроще и попросторнее, чтобы не мучиться с монтажом и подбором комплектухи.
Лучше не писать… Очень дорого… Хороший сетап тянет за двушник — не рублей.
700я — тушка не очень качественного Алигна стоит не по детски.
А к ней ещё надо три раза по столько (((
Пищалка весит не три кило и даже не два ))
С таким расчётом и чипы должны от платы отскакивать при вибрациях ))
На практике, нет там таких вибраций если моторы без люфтов и пропы в балансе.
«не русский».
Конечно, если есть возможность, лучше и приятнее читать написанное русскими словами.
Но ведь и само название «квадрокоптер» не совсем посконное русское.































700я — тушка не очень качественного Алигна стоит не по детски.
А к ней ещё надо три раза по столько (((
Просто не первый раз вижу конденсатор.
С таким расчётом и чипы должны от платы отскакивать при вибрациях ))
На практике, нет там таких вибраций если моторы без люфтов и пропы в балансе.
глаза режет!
Конечно, если есть возможность, лучше и приятнее читать написанное русскими словами.
Но ведь и само название «квадрокоптер» не совсем посконное русское.
На бочку с порохом его посадить — пущай полетает ))
Или с колокольни сбрасывать ))