Доброго времени суток!
Данный опус посвящен обзору квадрокоптера JJRC H11D и доработкам его по результатам эксплуатации и к чему эти доработки привели.
Коробка коптера была завернута в упаковочную вспененную пленку и упакована в полиэтиленовый пакет. Почта практически не смогла уничтожить упаковку, поэтому вложение не пострадало. Внутри оказались:
— блистер с коптером и передатчиком и защитой винтов;
— в отделной картонной коробке лежали монитор со складными шторками, аккумулятор для монитора, камера, УСБ зарядник для видеолинка;
— пакет с запасными винтами, отверткой и кабелем зарядки ходового аккумулятора.
Передатчик мне понравился — приятный на ощупь, не скрипит, не люфтит, красные кнопки на черной матовой поверхности приятно смотрятся.
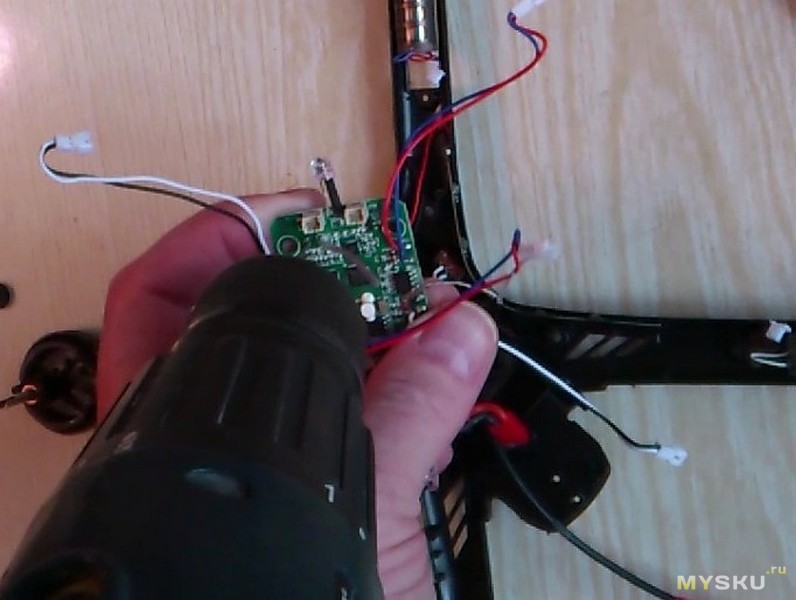
Питается пульт от 3-х элементов типа ААА. Хотя не обошлось без маленькой ложечки дегтя — кнопка на левом верхнем торце западала. Пришлось разобрать пульт и скальпелем «доработать» отверстие. Заодно я заменил проволочку, играющую роль антенны, на коаксиальную антенну.
Теперь пару слов о видеолинке. Монитор питается от литийполимерного аккумулятора емкостью 420 мАч, которого хватило на 56 минут работы. Диагональ 4,5 ", правда, изображение сильно зависит от угла обзора и внешней засветки. На тыльной стороне монитора имеется ДИП переключатель на 8 каналов, аналогичный находится и на камере, для изменения канала видео связи, например, когда вы летаете не один на таких аппаратах. В левом верхнем углу экрана имеется индикатор разряда батареи видеоприемника, в правом верхнем углу — видеокамеры. Кстати, индикатор приемника НИКОГДА не показывает полный заряд, только две из трех подушек. В правом нижнем углу экрана находится таймер, при включении видеозаписи он краснеет и отсчитывает время клипа.
Камера весит 24 грамма. Внутри установлен литийполимерный аккумулятор емкостью 300 мАч, которого хватает на 36 минут работы. Если в камере отсутствуеет карта памяти, на экране монитора в центре горит красная надпись CARD ERROR. У меня была карта 32 ГГб, не могу утверждать, что она проглотит бОльшую. Камера пишет клипами по 5 минут. Запись включается и выключается кнопкой на пульте. Чтобы клип сохранился, надо обязательно второй раз нажать на кнопку. И если во время видеозаписи вы нажмете кнопку FOTO, запись прервется. Камера пишет в формате AVI с разрешением 1280х720, 16х9, 30 fps.
Разрешение фото1600х1200.
Самая вкусная фенечка камеры — управляемый по углу объектив. И довольно забавный формат даты клипов и фото — 06.06.2023.
Коптер. Взлетный вес 152 грамма. Довольно симпатичный дизайн.
Для первого взлета установил защиту винтов, как оказалось — не зря. Управление оказалось очень резким. К тому же, у него обнаружился некорректируемый триммерами снос влево-назад, но об этом чуть позже. А пока продолжим изучение тушки. Как и следовало ожидать, сопротивляемость ветру у него не ахти, хотя на такой случай изготовители предусмотрели переключение чувствительности стиков (расходов). Но самая большая неприятность исходила не от ветра. Дальность радиосвязи составила всего 20-25 метров… При этом видеосвязь сохранялась примерно 70-80 метров. Оба эти параметра никак не согласуются с обещаными на странице продавца. Да и для ФПВ такая дальность никак не может считаться достаточной. Это второй вопрос, который я попытаюсь решить.
Не могу не отметить отдельно функции «безголовости» и возврата домой. Путем проб и ошибок было достоверно выяснено, что включение режима ВОЗВРАТ приводит к возврату коптера домой, т.е.… в Китай… Если серьезно, он летит в ту сторону, куда в момент активации режима направлен хвост. Поэтому, если вы зарулились и не видите его в воздухе, я бы не рекомендовал вам включать этот режим.
А вот режим ХЕДЛЕСС показался мне забавным. Здесь также есть нюансы, но при их соблюдении все проходит замечательно.
Дело в том, что включать его надо СТРОГО ОРИЕНТИРОВАВ КОПТЕР ОТ СЕБЯ. Т.е., если в момент активации режима вы смотрите коптеру в хвост, а нос его направлен по направлению ваших глаз, то движение правого стика вперед ВСЕГДА будет приводить к движению коптера от вас, стик назад — ВСЕГДА коптер полетит к вам, стик влево, коптер влево и стик вправо — коптер вправо, независимо от ориентации его в небе.
В этом видео распаковка и первые впечатления от товара.
Теперь немного справочной информации.
1. Размер аккумуляторов 51х30х10, это на случай приобретения аккумуляторов у сторонних продавцов.
2. Время зарядки маршевого аккумулятора от родной зарядки около 2,5 часов.
3. Время зарядки видеолинка — камеры и монитора, после полной разрядки до отключения — 2,5 часа. Напомню, что монитор до отключения проработал 56 минут, камера 35 минут.
4. Настройки триммеров не сохраняются после выключения питания коптера, Эту процедуру придется выполнять каждый новый полет. Или не придется…
5. Высота коробки на 1 см меньше высоты коптера, так что использовать собственную тару для транспортировки не получится. Или немного утоптать…
6. Время полета с камерой у меня варьировалось от 7 до 7,5 минут. Без камеры как-то не засек…
Ну а теперь, собственно, про допиллинг.
Первое, что было мной замечено в первом же полете в квартире, что его невозможно заставить висеть. Квадрик упорно сносило влево-назад, причем это не удавалось компенсировать никакими триммерами. Вторая неприятность подстерегала на улице — дальность управления оказалась где-то на уровне 20-25 метров… Хотя дальность видеосвязи была как минимум в три раза больше.
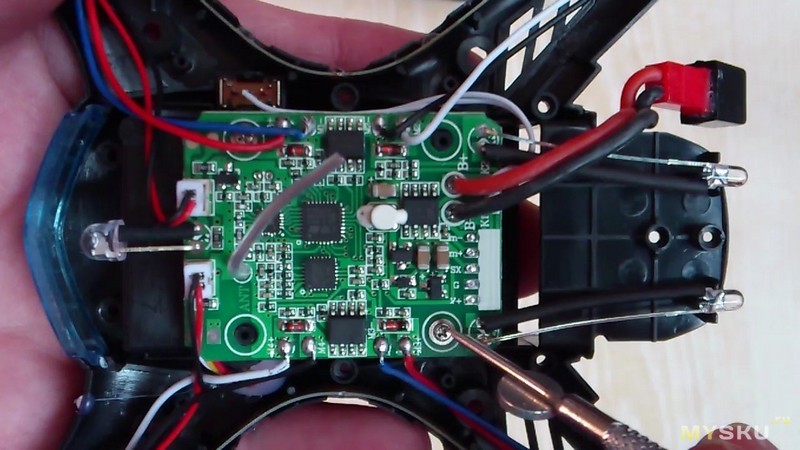
Для начала произведем вскрытие. Для этого надо отвернуть бесчисленное количество маленьких шурупов снизу коптера и четыре сверху, на концах лучей. Также надо снять винты с осей.
После снятия верхней части корпуса наблюдаем печальную картину — антенна представляет собой согнутый огрызок провода длиной 25 мм, по задумке конструкторов должна символизировать 1/4волновой штырь, а плата контроллера закреплена только на 2 шурупах, хотя предусмотрено 4.
Доработка будет состоять из замены 1/4волнового штыря на 1/4волновой коаксиальный диполь и закреплением платы контроллера.
Антенну изготовим из куска 50 омного кабеля для WiFi антенны, по рекомендациям из книги К.Ротхаммеля «Принцип работы и свойства антенн».
Кто не в курсе, данная книга — «библия» для антенностроителей… Для статистики уточню, что так мной были доработаны более десятка приемников для радиоуправления спортивными авиамоделями (доработка не являлась самоцелью, большинство фирменных приемников имеют антенны типа 1/4волновой диполь, но мне необходимо было установить их в радионепрозрачном фюзеляже, пришлось удлинять фидеры с целью вывести антенны наружу).
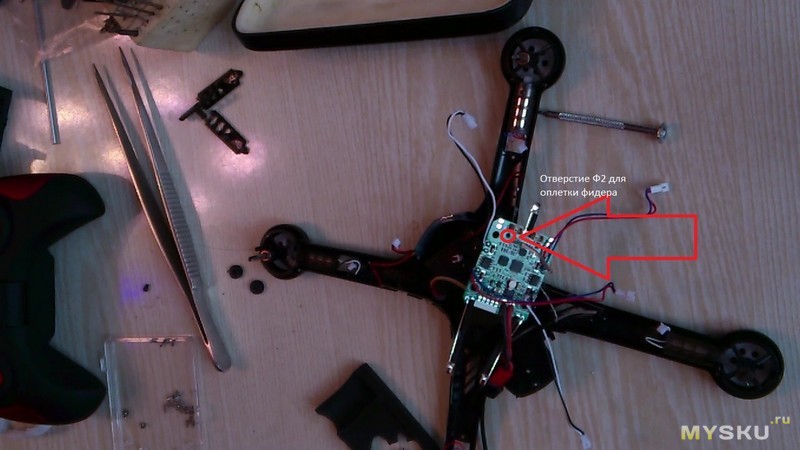
Изготовление антенны затруднений не представляет. Самым трудным было найти латунное колено от телескопической антенны Ф3...4 мм. Верхнее плечо делаем 30 мм, длину трубки с учетом коэффициента укорочения 29 мм. На фидер около разделки экрана мотаем виток к квитку обычную хлопковую нить, чтобы центрировать трубку, затем заворачиваем экран на трубку и припаиваем. Для эстетики (и прочности) одеваем на трубку термоусадку. Для пайки антенны к плате я просверлил в ней отверстие Ф2 мм, для того, чтобы вывести экран на нижнюю сторону платы и припаять его к минусовой дорожке.
После этого при сборке выведем антенну через одно из вентиляционных отверстий в нижней части корпуса и закрепим ее на опоре. Как-то так.
Теперь займемся контроллером. Я решил заменить демпферы на более высокие, чтобы иметь возможность в некоторых пределах менять высоту крепления платы, чтобы с помощью контролируемого перекоса компенсировать снос квадрокоптера. Демпферы изготовил из пенорезины от какой-то упаковки с помощью тех самых трубок от телескопической антенны.
Слева родной демпфер.
Под шурупы подложил шайбы из тонкого стеклотекстолита, чтобы шляпки не провалились в отверстия платы. Плату устанавливал с помощью самого распространенного и точного прибора — «на глаз». Поскольку коптер сносило влево-назад, левый задний шуруп был закручен чуть сильнее своих собратьев (автопилот, стремясь выровнять положение платы(гироскопов) по горизонтали, увеличит тягу на заднем левом моторе). После этого допиллинг можно считать законченным и можно приступать к сборке.
Пробный полет показал, что коррекция платы помогла. Я естественно, не попал в ноль, зато с помощью небольшого триммирования удалось заставить коптер висеть!
Осталось выяснить лишь, позволила ли новая антенна увеличить радиус действия аппаратуры. Надо отметить, что ранее, после первых полетов, я заменил антенну в передатчике на такую же.
Полевые испытания показали, что дальность по земле(коптер стоял на земле) увеличилась вдвое (или около того)! Если в первых полетах она была около 20-25 метров, сейчас связь сохранялась около 50 метров. Полеты на такое удаление больше не приводили к поиску коптера в чужих кустах.
В заключение хочу остановиться на еще одной особенности данного аппарата. Возможно, это фенечка только одного моего экземпляра, хотя врядли. Дело в том, что валы роторов ввиду «особоточного» изготовления, имеют ощутимый люфт в осевом направлении. Это приводит к тому, что при маневрах вал ротора, на котором снижается тяга(а в данной модели она снижается отключением питания мотора) под действием силы тяжести опусается вниз, на величину того самого люфта. Шестерня ротора выходит из зацепления с шестерней мотора, в результате мы слышим характерный звук «пережевывания» зубьев шестерен. Я вылечил это путем размещения дистанционных шайбочек, изготовленных из блистера, в котором пришел коптер, на валах роторов между винтами и втулками.
Теперь что мы имеем в сухом остатке:
+ приятный дизайн;
+ неплохая комплектация;
+ очень яркая подсветка, видно даже днем;
+ подсветку можно отключить;
+ камера вполне приличного качества в этом ценовом диапазоне, есть с чем сравнивать;
+ возможность быстрой смены двигателя, так же есть опыт;
— малая дальность радиосвязи из коробки;
— малая ветросопротивляемость;
— недоработки по режиму висения;
— слабое место — редукторы.
Надеюсь, мой опыт окажется кому-то полезным.
Удачных вам полетов!
Товар предоставлен для написания обзора магазином. Обзор опубликован в соответствии с п.18 Правил сайта.
Планирую купить+1Добавить в избранноеОбзор понравился+2
+4







 Как и следовало ожидать, сопротивляемость ветру у него не ахти, хотя на такой случай изготовители предусмотрели переключение чувствительности стиков (расходов). Но самая большая неприятность исходила не от ветра. Дальность радиосвязи составила всего 20-25 метров… При этом видеосвязь сохранялась примерно 70-80 метров. Оба эти параметра никак не согласуются с обещаными на странице продавца. Да и для ФПВ такая дальность никак не может считаться достаточной. Это второй вопрос, который я попытаюсь решить.
Как и следовало ожидать, сопротивляемость ветру у него не ахти, хотя на такой случай изготовители предусмотрели переключение чувствительности стиков (расходов). Но самая большая неприятность исходила не от ветра. Дальность радиосвязи составила всего 20-25 метров… При этом видеосвязь сохранялась примерно 70-80 метров. Оба эти параметра никак не согласуются с обещаными на странице продавца. Да и для ФПВ такая дальность никак не может считаться достаточной. Это второй вопрос, который я попытаюсь решить.