На примере радиоуправляемого Rock Crawler я покажу как можно ремонтировать или модернизировать р/у игрушки.
Вообще платформа краулеров очень удобна для модернизации или разничных DIY, так как имеет простую и проходимую подвеску и приводы 4WD.
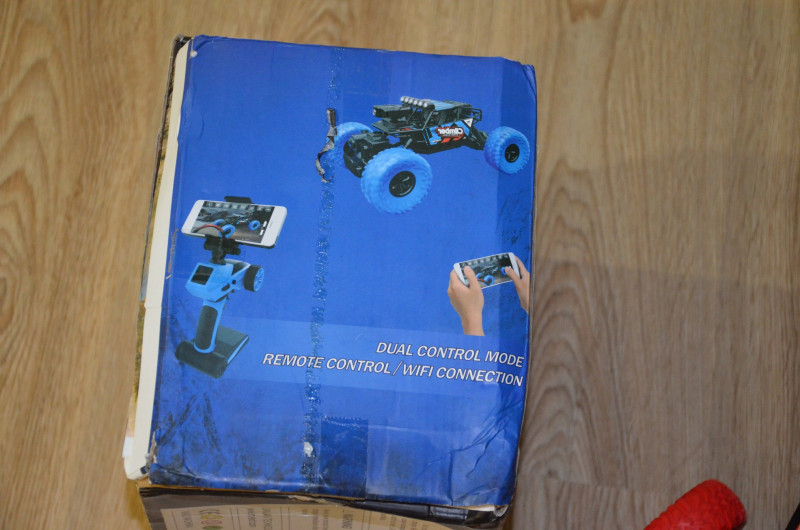
Rock Crawler модели Q45 от JJRC имеет на борту WiFi FPV камеру (простенькую, 480P) и дублирование управления через Wi-Fi.
В обзоре будет отзыв о краулере, советы по ремонту, полезная информация и небольшой DIY на Arduino. Внимание: много информации под катом. Если интересно — заходите))))
Всем привет!
В жаркий майский денечек появилась возможность выложить некоторую информацию, которая накопилась.
А именно, небольшая информация по краулерам вообще.
Рассказывать буду на примере радиоуправляемой машинки JJRC Q45, которая достаточно давно лежала у меня без дела)))))
Речь пойдет про переделку краулера Rock Crawler JJRC Q45, про его конструкцию и вообще про конструкцию, переделку и ремонт краулеров вообще. Конкретного ремонта не будет, скорее будут советы и рассмотрение конструкции.
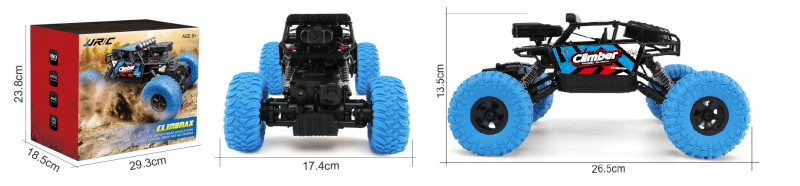
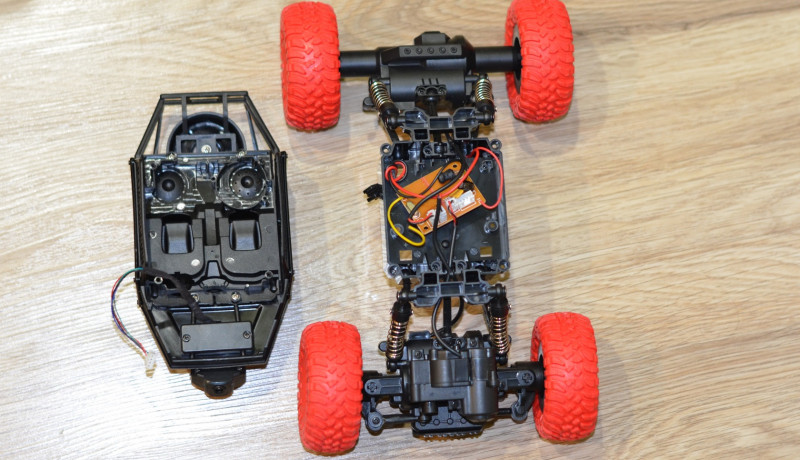
Внешний вид краулера – достаточно проходимый «внедорожник» на радиоуправлении. Масштаб заявлен 1:18 (длина машинки около 26 см).
Особенности подобных краулеров — подвеска. Это два моста, подвешенные на амортизаторах с пружинами, которые обеспечивают достаточно большие ходы.
Популярные Rock Crawler имеют два моста с электромоторчиком, работающие параллельно. Плюс поворотный редуктор для поворотов влево-вправо. Дешевые модели имеют дискретное управление поворотом (без ШИМ и сервопривода).
На мостах установлены большие дутые колеса.
Машинка небольшая (~500 г с аккумулятором), резвая и приемистая. Хотя на счет «резвая» я погорячился – понижающие редукторы сдвигают баланс в сторону проходимости, а наличие в дешевых версиях аккумулятора Ni-Cd также не прибавляет «резвости». Обычно меняют NiCd на Lipo с учетом напряжения двигателей. Заодно подобная замена добавляет времени работы от одной зарядки аккумуляторов.
Описание функциональных деталей краулера
Особенности модели JJRC Q45 — это наличие FPV камеры и, одновременно, Wi-Fi подключения и управления.
Крепление камеры обеспечивает фиксацию в широком диапазоне углов по вертикали и по горизонтали.
Пульт д/у на два канала + канал управления камерой. Пульт предусматривает установку смартфона в качестве FPV монитора на верхней части в держатель. Выглядит как классический для р/у машинок пульт-пистолет с курком.
Смартфоном можно пользоваться не только как монитором FPV. Есть возможность дублирования управления р/у машинкой через WiFi. Предусмотрены клавиши управления (поворот, газ, фото-видео), а также возможность управления наклоном смартфона (с помощью гироскопа).
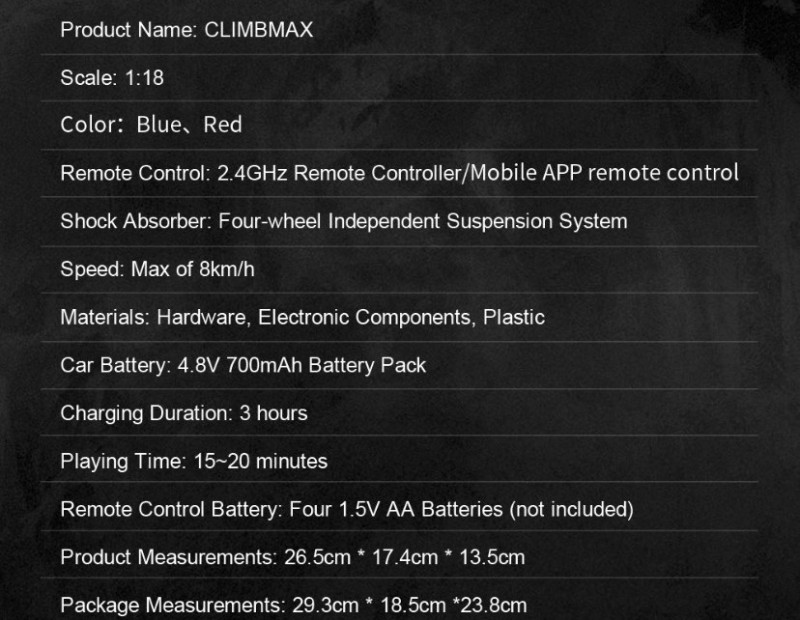
Приведу описание краулера JJR/C Q45.
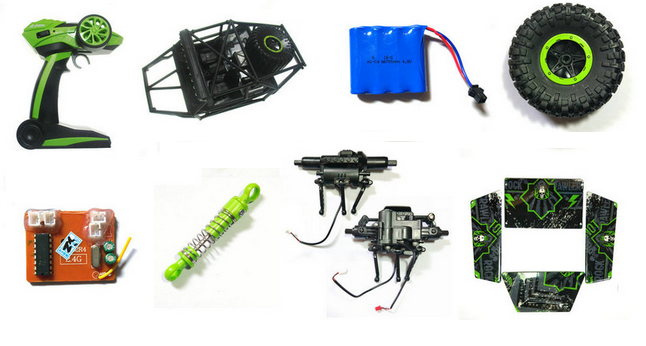
Комплект поставки:
1 * Q45 RC Crawler
1 * 4.8V 700mAh Ni-Cd battery
1 * Transmitter
1 * Mobile phone holder
1 * USB charger cable
1 * English Manual
Вообще есть и другие модели краулеров, например, популярный WLTOYS или его клоны типа HBP1802. Есть также другие разновидности с FPV камерой, например, CRAZON 171604B. Основные моменты у них очень близкие, если не идентичные. Под переделку подойдет все.
Краулер ждал своей участи уже давно, но оформить пост по человечески руки дошли только сейчас, на праздниках))))
Упаковка этого краулера, как и других – яркая и красочная, можно смело покупать в подарок.
На коробке есть подробное описание, в том числе и по FPV/WiFi управлению.
Краулер выглядит достаточно интересно. Есть вариант с синей расцветкой шин и корпуса.
Пульт пистолетного типа, простой, всего два канала управления (вперед-назад пропорционально, влево-вправо дискретно), но плюсом есть клавиша активации камеры (рядом со светодиодом).
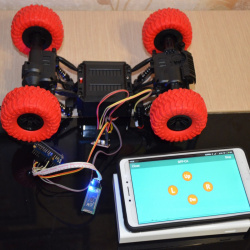
Что мне нравится в подобных р/у автомобилях — это можно снять корпус, и останется платформа для какой-либо самоделки.
Можно взять краулер без Wi-Fi камеры, что даже более интересно для доработки. Хотя детям камера интереснее.
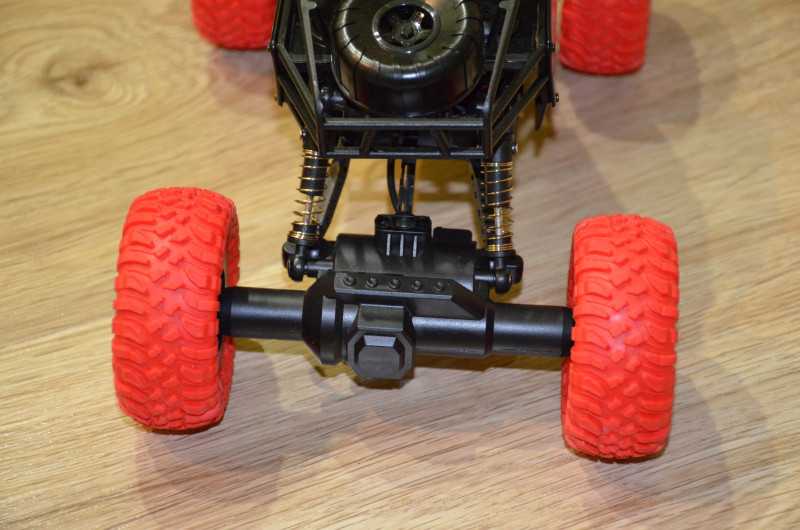
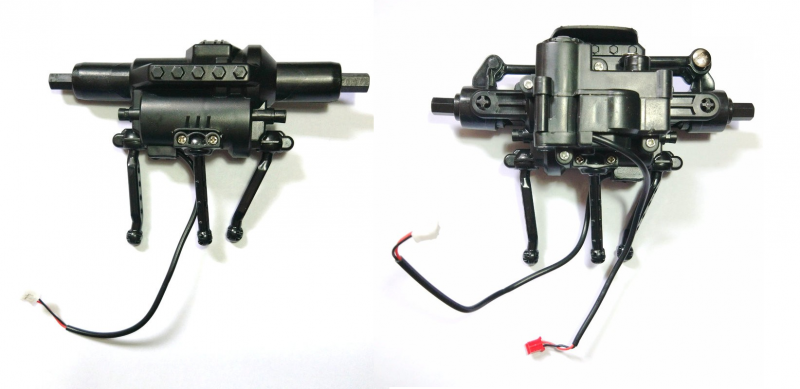
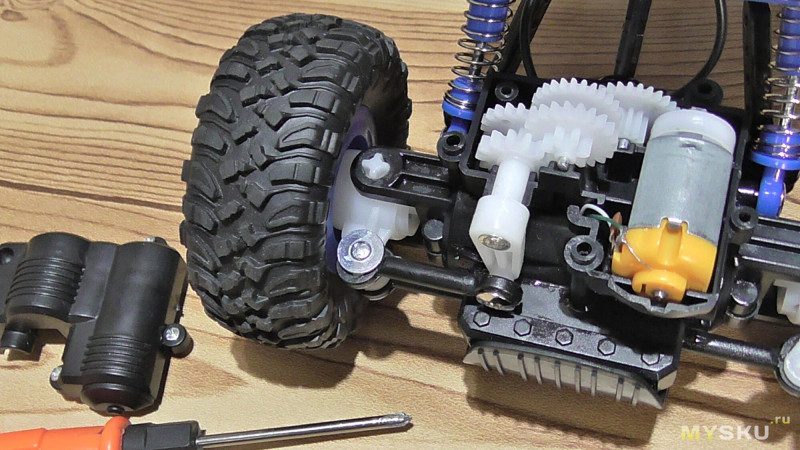
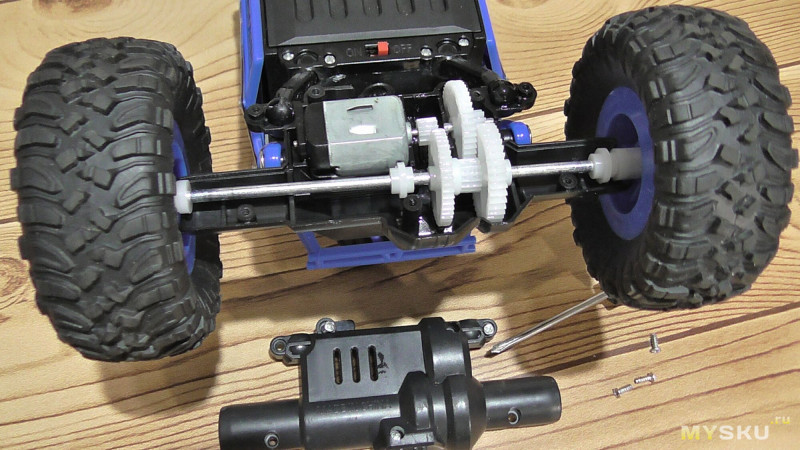
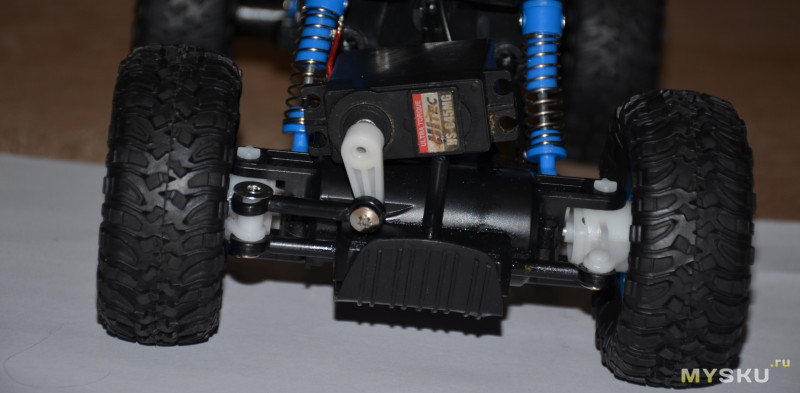
Задний мост краулера. Внутри спрятан электромоторчик и редуктор.
Передний мост собран вместе с поворотным редуктором-трапецией
Ходы подвески доставляют. Самое то, в качестве платформы под переделку.
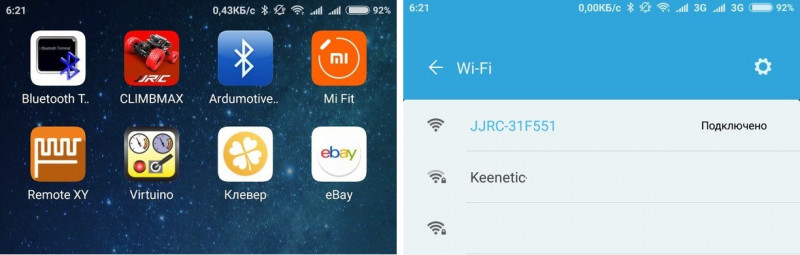
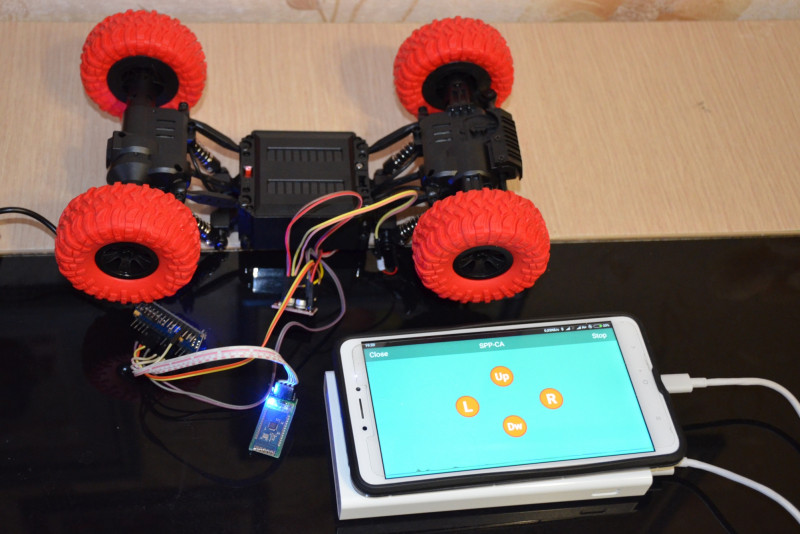
Как я уже говорил в начале, можно скачать приложение CLIMBMAX и управлять машинкой прямо с телефона.
Подключение через сеть WiFi — название типа JJRC xxxxxx
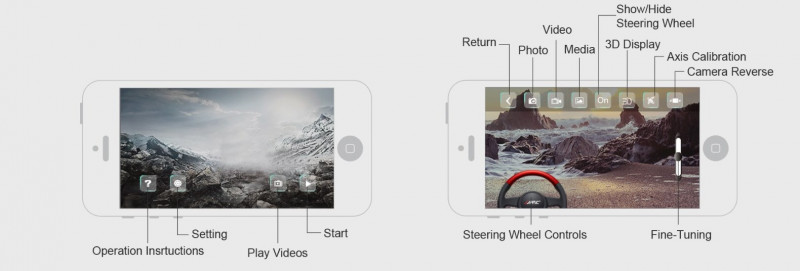
Скрины приложения CLIMBMAX
Доступные настройки приложения
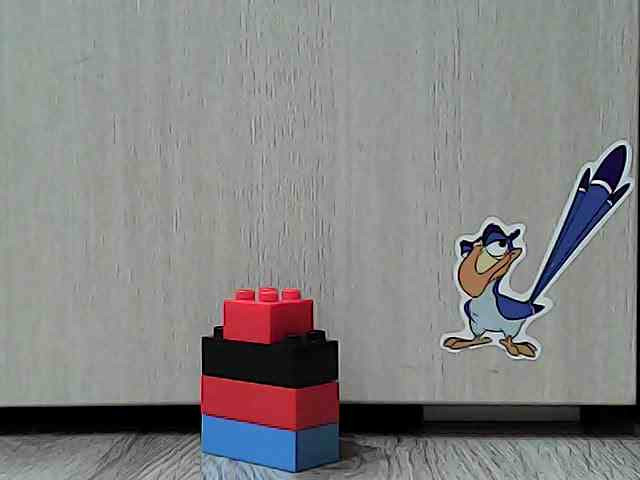
Пример фотографий с камеры
В приложении есть имитация руля для поворота и ползунок газа вперед/назад. Верхняя панель приложения — это кнопки фото-видео съемки и просмотра, справа на панели присутствует значок гироскопа — это активация управления наклоном смартфона.
Управление, правда, получается достаточно своеобразное, нужно привыкать, пультом удобнее.
Естественно, как и взрослому, так и ребенку хочется посмотреть, что внутри игрушки. Далее будет разборка, описание внутренностей и небольшие размышления.
Несколько раз сталкивался с мелким ремонтом, а также частенько приносили посмотреть или спрашивали совета по ремонту. Проблем больших нет — краулер ремонтопригоден. Нужно просто вычислить сломанную запчасть и или починить ее, или заменить. Вот тут уже нужно смотреть — скорее всего покупка нового краулера будет дешевле, чем масштабный ремонт. Ну а так — практически все комплектующие доступны для заказа (rock crawler spare parts).
Небольшая информация для ремонта:
1) Если есть серьезные проблемы с пультом — можно заменить на что-то подобное самодельное дистанционное управления на RF модулях nrf24l01 или подобных. Выход — на Ардуинку.
При этом можно заложить любые возможности и сделать удобный для себя пульт. Проще всего взять старый джойстик от консолей + придумать дополнительные каналы на светомузыку (передние, задние фонари, «люстра», сигнал), лебедку и прочее допоборудование (устанавливают игрушечные пушки и т.п.).
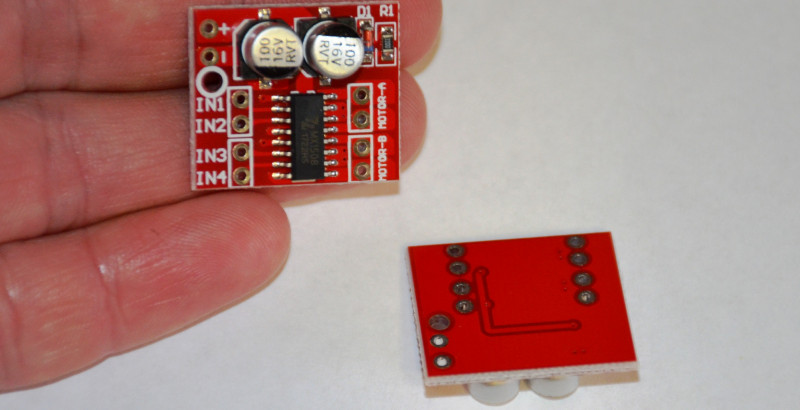
2) Если есть проблемы с силовой частью — не крутится один из моторчиков, можно заменить в обход основной платы (или полностью ее заменить), установив модули H-Bridge. Обычно они двухканальные. Я обычно использую компактные драйверы двигателей MX1508 или L9110S (или подобные), но можно поставить мощные L298N, особенно если нет ограничения по объему и массе модели. Паять можно поверх старого, на проводках, можно старый выпаять и подпаяться к выходам TX микросхемы.
Как вариант — можно заменить плату управления целиком. Цена вопроса несколько баксов. Меняется без пайки. Желательно заранее подобрать нужную плату для своего диапазона. Часто продают в комплекте с пультом (тогда цена становится примерно 50% от нового краулера). Так что смотрите целесообразность такой покупки.
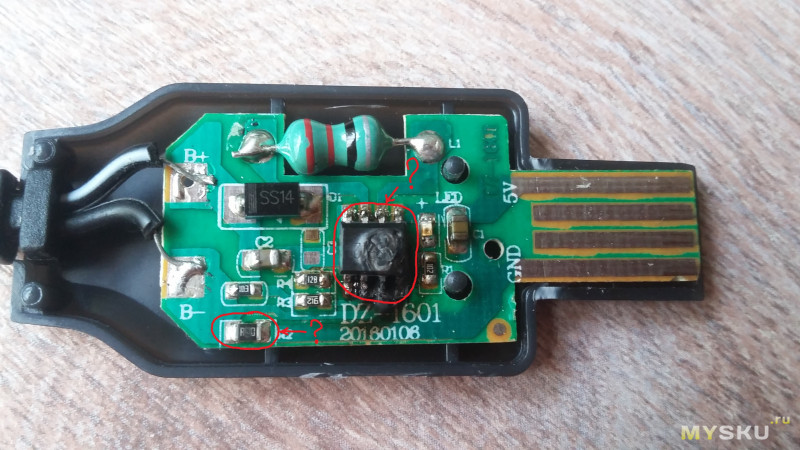
3) Проблемы с зарядным устройством лечатся либо заменой DC-DC преобразователя, либо покупкой нового з/у. Новые стоят около $3-4. В последнее время часто вижу именно USB зарядные устройства, однотипные. Внутри схемотехника похожая, отличаются коннекторы и выходное напряжение. С целью ремонта можно заменить з/у на регулируемый преобразователь + USB разъем. Нужно будет выставлять параметры, подходящие для вашего аккумулятора (бывают варианты на 3.7В, 4.8В, 7.2В и так далее, последние два NiCd).
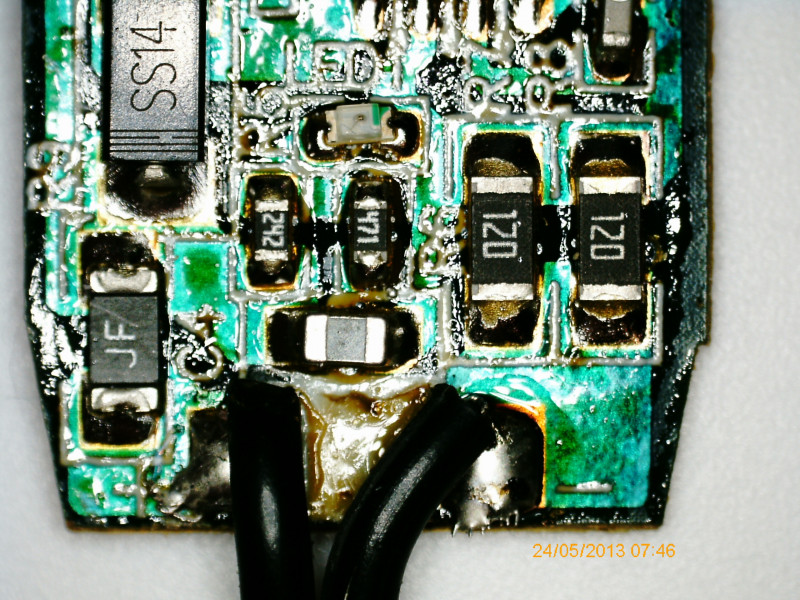
Бывает, встречаются и такие варианты...
Сгорела микросхема ШИМ
4) Проблемы с механической частью — можно отдельно купить тяги, мосты, раму, корку, колеса и т.п. По частям собирать краулер дороже, чем купить новый в сборе, но купить 1-2 детали для замены сломанных вполне можно. Ну или напечатать замену на 3Д принтере.
Обычно тяжело ремонтируются мосты — трудно подобрать пластиковые шестеренки, а при замене элемента питания на более мощный, как правило страдают моторы, иногда — пластиковые шестеренки при заклинивании.
5) Замена элемента питания. Это скорее не ремонт, а модернизация. Продаются уже доработанные модели краулеров с Li-ion аккумулятором на 3,7В, но гораздо больше попадаются на NiCd элементах питания, да и установка Li-ion с DC-DC на нужное напряжение (например, на 4.8В) даст пользы гораздо больше. Иногда, достаточно просто одной платы DC-DC и одного элемента 18650 (от старого ноутбука или электронной сигареты).
Теперь немного информации по конкретной модели.
Я разберу краулер и постараюсь более менее подробно описать компоненты.
Разборка корпуса краулера выполняется достаточно просто — 4 винта, справится даже ребенок. Все хочу сделать свой корпус (на 3Д принтере), никак руки не доходят))))
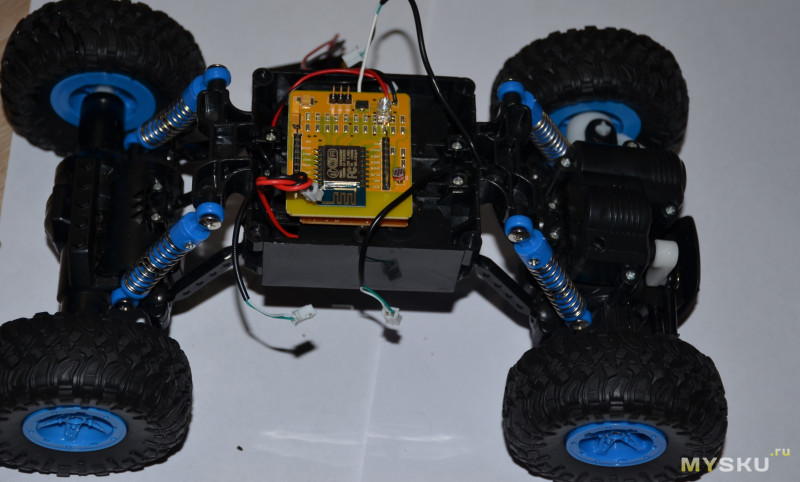
Внутри под корпусом находится отсек для аппаратуры — достаточно просторный для размещения небольшой платы Ардуино + драйверы двигателей.
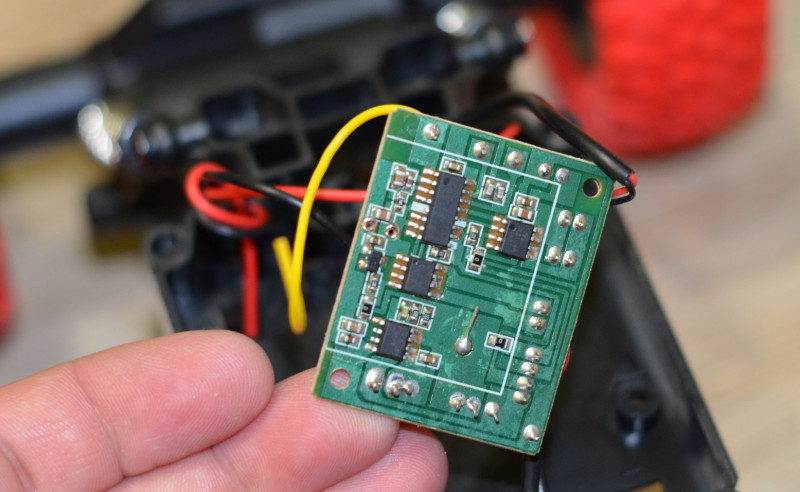
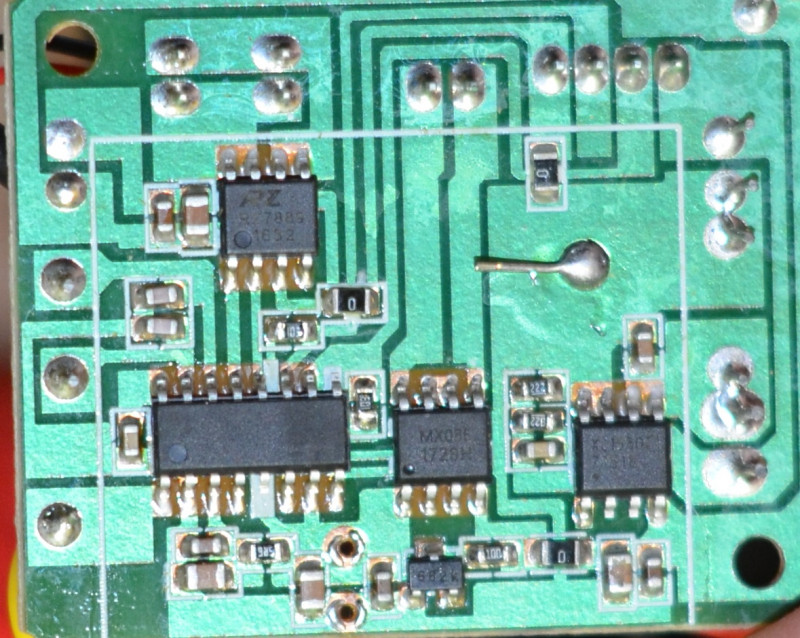
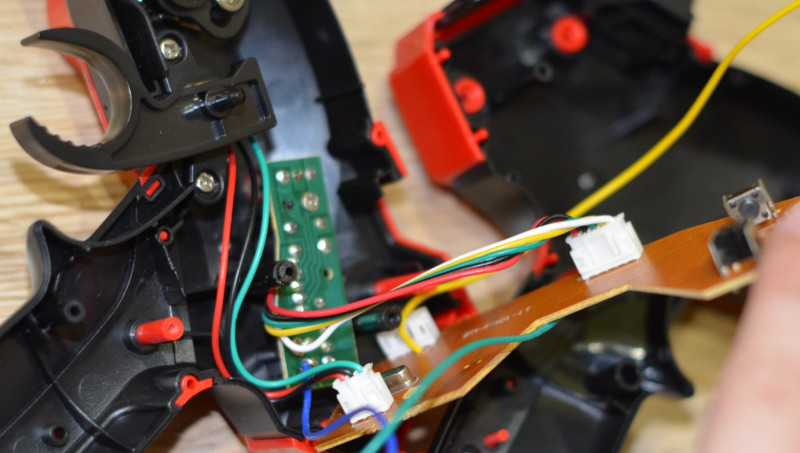
Установлен безымянный приемник на 2.4ГГц типа комплекта RX-2/TX-2 на два канала управления, только с учетом диапазона 2.4ГГц (ТX-2 устанавливается в пульт, RX-2 — приемник сигнала на плате, но этот комплект RX-2/TX-2 и достаточно старый. Встречал модификации RX/TX-6, но у них другие корпус и распиновка. В последнее время все эти приемники/передатчики идут без маркировки, очень тяжело найти информацию). Так же на плате видно спаренный H-Bridge типа MX1515 и дополнительно могут быть транзисторные сборки на управление светомузыкой. Могут быть еще заложены какие функции (Turbo, Demo и т.п.)
Выходы на плате подписаны (ANT, V+/V-, L/R, F/B, LED), так что с переделкой все просто.
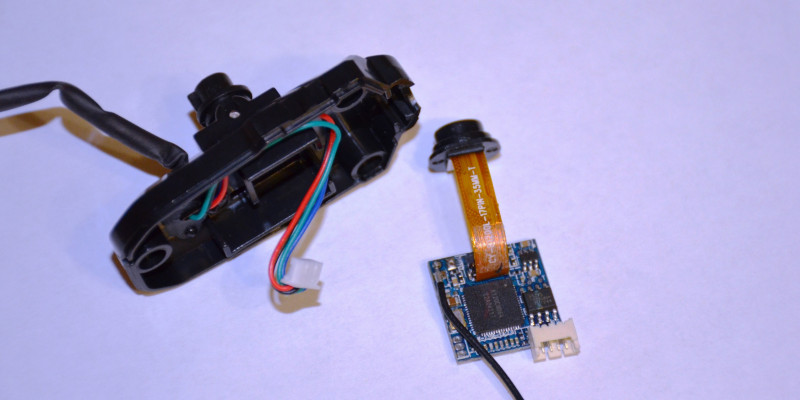
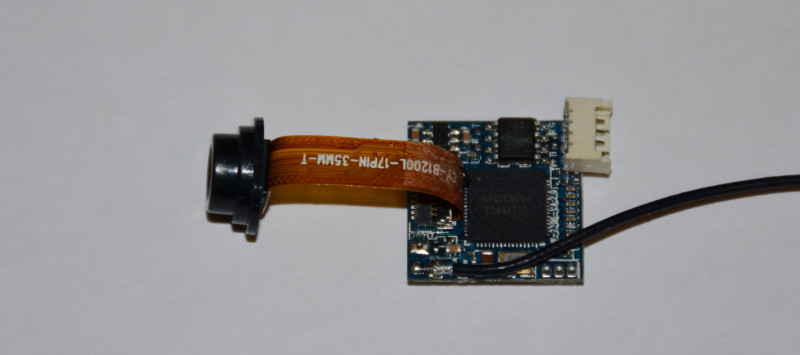
Разборка камеры.
В модели JJRC Q45 особый интерес представляет FPV камера, которая по совместительству является Wi-Fi точкой доступа, а также приемником сигнала р/у.
Внутри корпуса находится сенсор камеры + чип обработки сигнала. На обратной стороне платы — Wi-Fi чип с выходом RX/TX, который поднимает точку доступа и обеспечивает двустороннюю связь со смартфоном (передача фото/видео + прием команд управления).
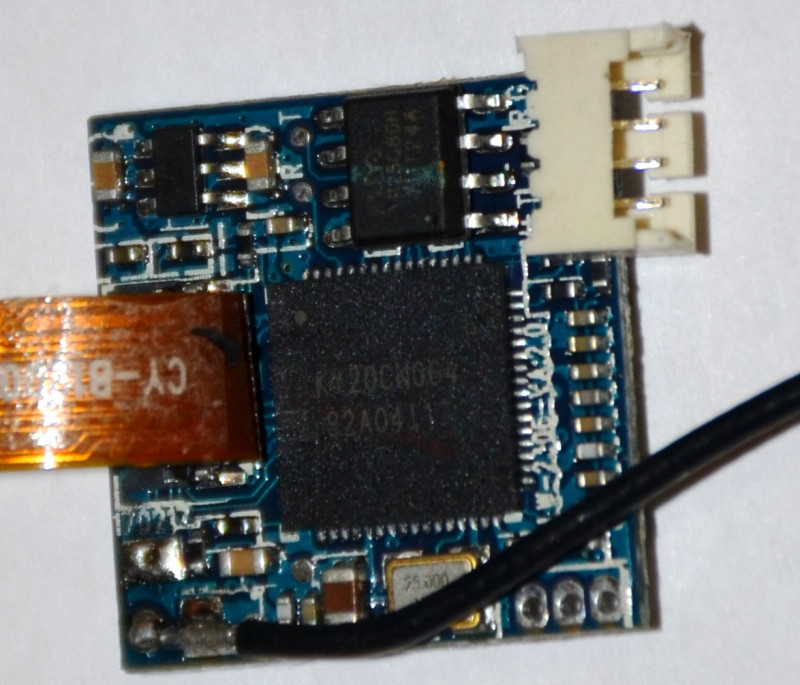
Чип видеообработки ky20cn064 и чип памяти для Wi-Fi p25Q80H.
Чуть крупнее.
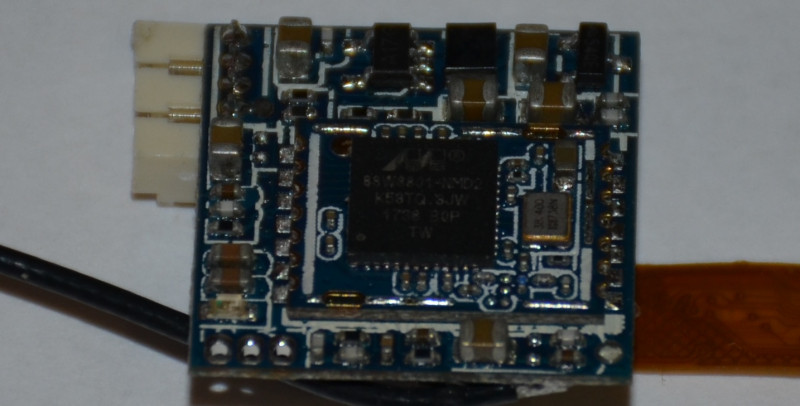
А вот на обратной стороне модуля расположен Марвеловский Wi-Fi микроконтроллер 88W8801-NMD2.
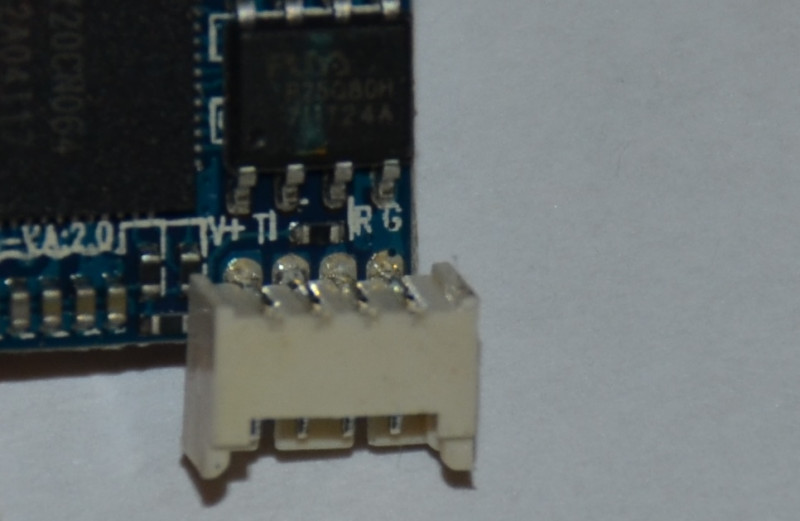
С микроконтроллера предусмотрен выход команд управления RX/TX на плату краулер (маркировка на коннекторе V+, R, T, G).
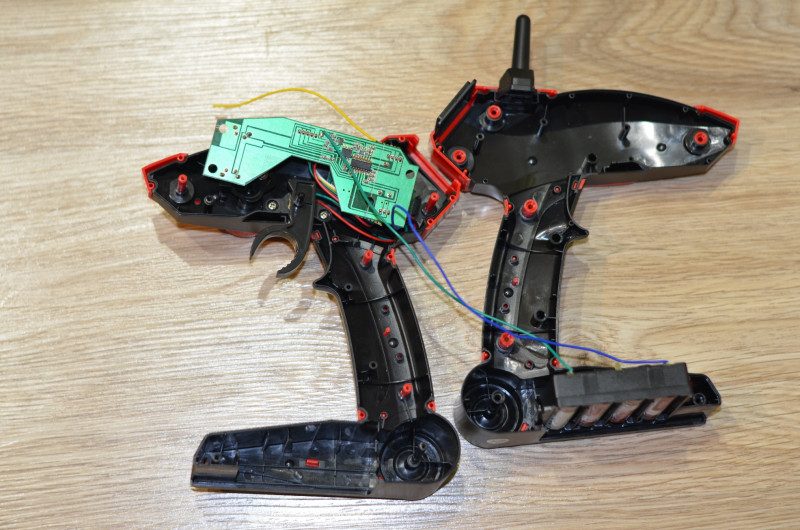
Разборка пульта.
Тут как раз ничего необычного. Дешевый пульт на АА батарейках, внутри потенциометр для пропорционального управления газом, две кнопки поворота (дискретное управление), плюс выключатель, светодиод и кнопка камеры. Пульт расчитан на работу в диапазоне 2.4ГГц. Внутри есть место для размещения, например, модулей nrf24l01.
На плате видно микропереключатели управления поворотом.
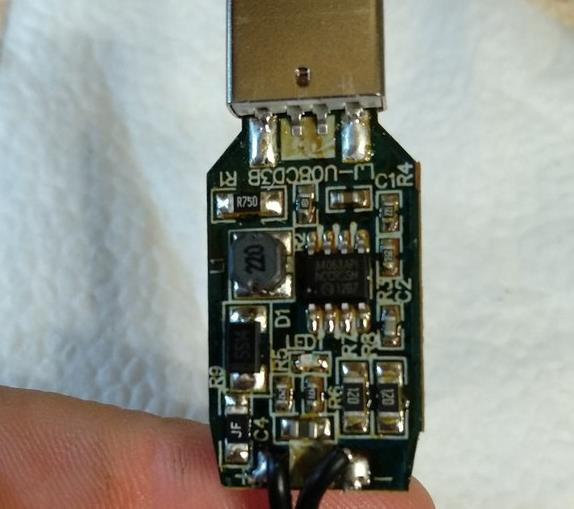
Разборка USB зарядного устройства.
З/у устройство типовое, предусмотрено для заряжания NiCd аккумуляторов на 4.8В.
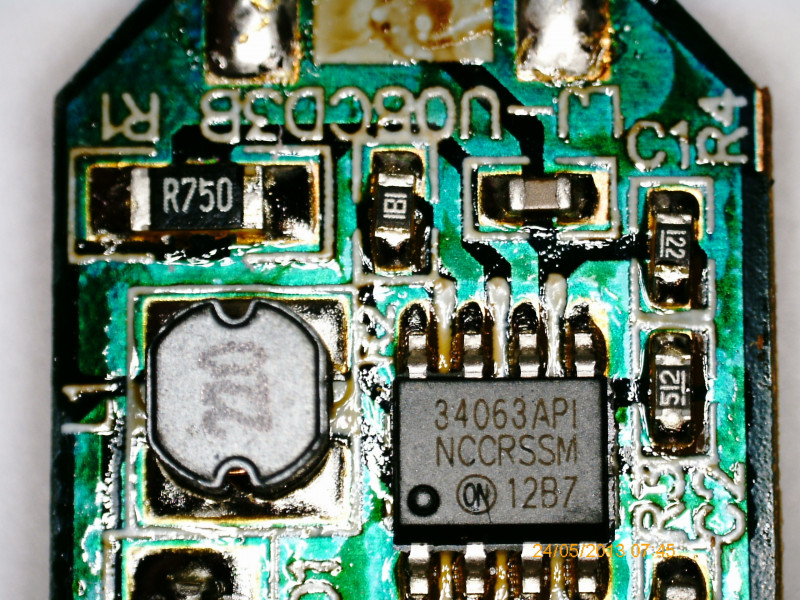
Внутри стоит MC34063 – универсальная микросхема для самых простых импульсных преобразователей.
Импульсный регулятор напряжения MC34063A (полный российский аналог КР1156ЕУ5) — специально разработанная микросхема для DC-DC преобразователей с минимальным количеством внешних элементов. Микросхема MC34063A применяется в импульсных источниках питания со входным напряжением от 3 до 40В и выходным током до 1,5А
Выходное напряжение задается резистивным делителем, при желании можно переделать «под себя», схема типовая.
Схема подключения микросхемы простейшая, но номиналы резистивного делителя нужно подбирать в зависимости от вашего напряжения. Так как эта же микросхема используется как для зарядки литиевых аккумуляторов краулеров (на 3.7В), так и кадмиевых на 4.8В/6.0В/7.2В.
По разборке пока все, мосты разбирать не стал — есть очень много информации в предыдущих обзорах.
Считаю ремонт мостов не целесообразным, конечно, если сильно заморочиться — можно и поменять шестерни. Сгоревший двигатель то поменять большого труда не составит.
Еще с прошлого года была неосуществленная идея о переделке р/у машинки на управление с Bluetooth.
Выбор краулера под DIY платформу достаточно очевиден — имеется простая ремонтопригодная конструкция с приличной проходимостью, раздельные мосты с электромоторами, присутствует отсек для электроники, батареи, а также можно установить другой кузов/корку, в том числе и самодельное.
Если интересно вообще, как переделывать р/у модели — можно поискать что-то типа: «rock crawler rс hack», «RC car hack» или «Bluetooth RC CAR».
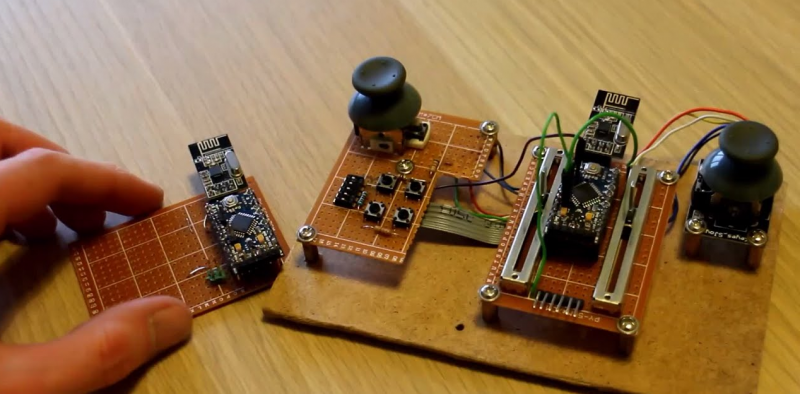
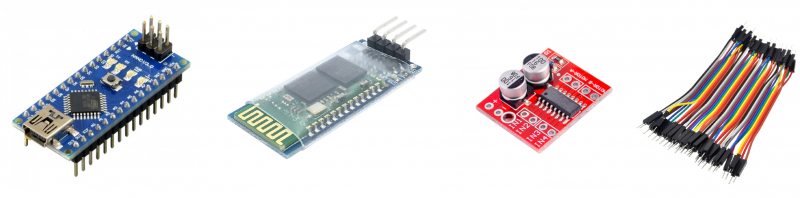
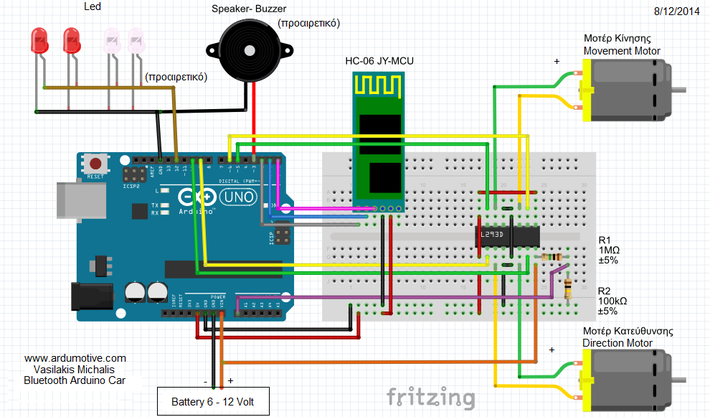
Список деталей для переделки небольшой:
1. Плата управления Ардуино (UNO/Nano — самые популярные, подойдут и любые другие с учетом совместимости по пинам).
2. Модуль беспроводной связи Bluetooth. Я выбрал HC-06, как самый простой и недорогой. Возможны другие варианты.
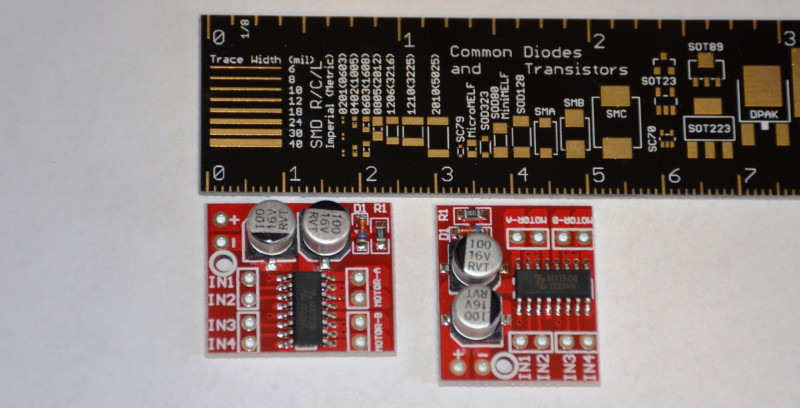
3. Драйверы двигателей в качестве силового выхода Ардуины + ШИМ. Я выбрал модули на основе MX1508 как самые дешевые и компактные.
4. Провода (типа Dupont, лучше разных конфигураций мама-папа), светодиоды и резисторы для светотехники, сервопривод в качестве рулевой машинки и т.п.
Модули на основе MX1508 оказались удобны, так как имеют по 2 канала на двигатели (4 провода управления на каждом модуле). На один модуль можно повесить оба моста (F/B) с ШИМ, на второй модуль штатный дискретное управление рулевой машинкой (без переделки), а последний канал оставить для управления фонарями (две линии, без ШИМ, на передние фары и задние стопы).
Что касается переделки под пропорциональное управление поворотом — тут проблем особых нет.
Единственно, замечу, что маленькой 9г сервы не хватает, а большая не встанет на штатное место поворотного редуктора. Нужно будет «слегка модифицировать» — срезать пару креплений, а лучше напечатать на принтере новый бокс под большую серву. Это пока впереди, обычно 3д модель у меня «притирается» раза с третьего, с размерами сложных деталей мне угадать сложно.
Что касается схемы подключения — каких-либо «канонов» нет, просто подключаем RX/TX блютуз модуля к ардуине (и прописываем эти пины в прошивке), подключаем выходы ардуины к входам модулей-драйверов двигателей.
Драйверы я подключал прямо к штатным разъемам на проводах двигателей — это проще, конструкция получается модульная. Не забываем про питание двигателей и питание ардуины.
Накидываем простенький скетч для приема команд BT.
Для начала я использовал просто дискретные выходы, для проверки работы (едет-не едет).
Дополнительная информация - простой скетч для проверки
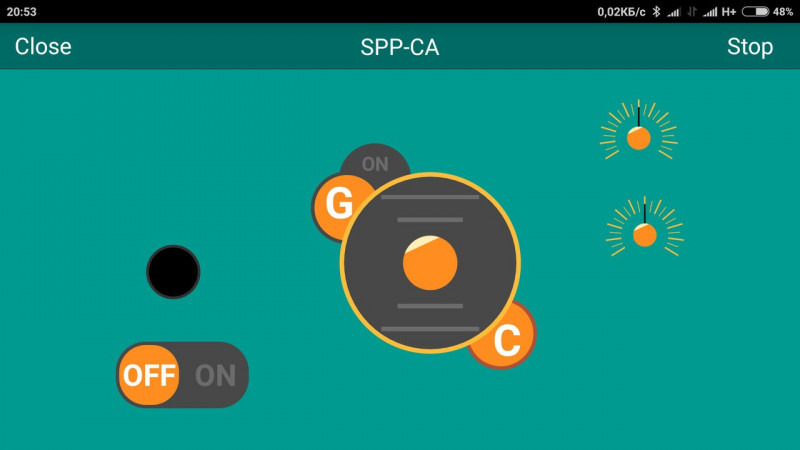
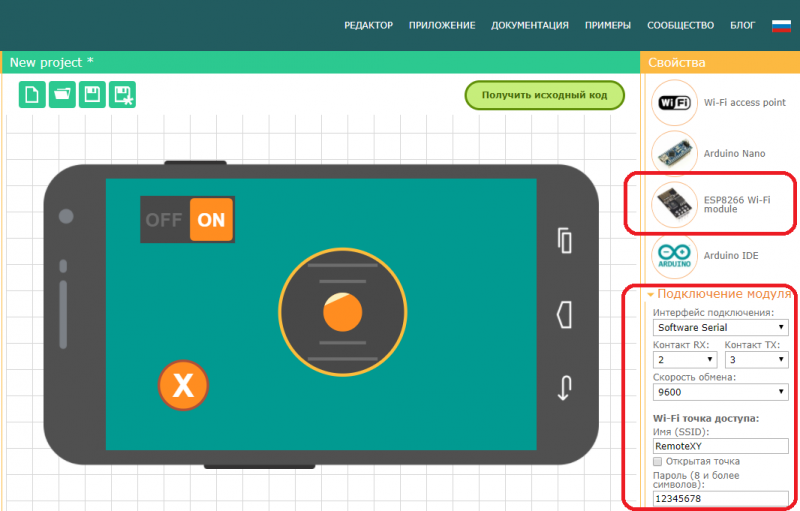
Использовал сайт-конструктор Remotexy, это сократило время разработки скетча до нескольких часов (вместо нескольких дней). Для примера — простой интерфейс, реализующий команды влево-вправо и вперед-назад.
Скачиваем с сайта код интерфейса, прописываем свои пины выходов и заливаем в ардуину.
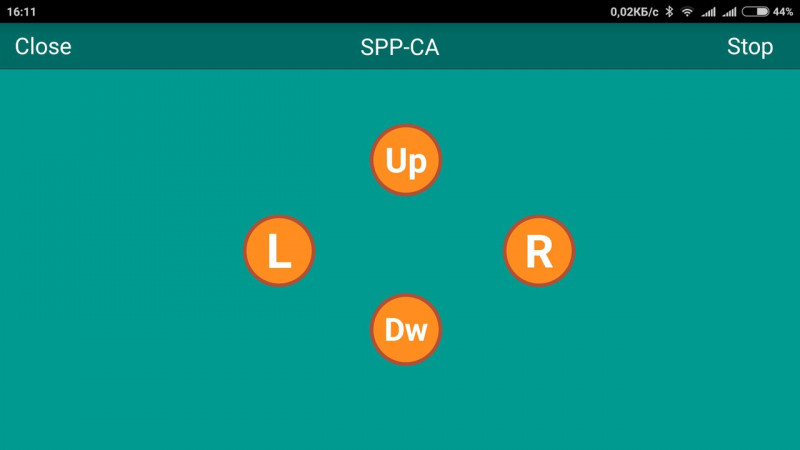
Подключаемся к модулю Wi-Fi
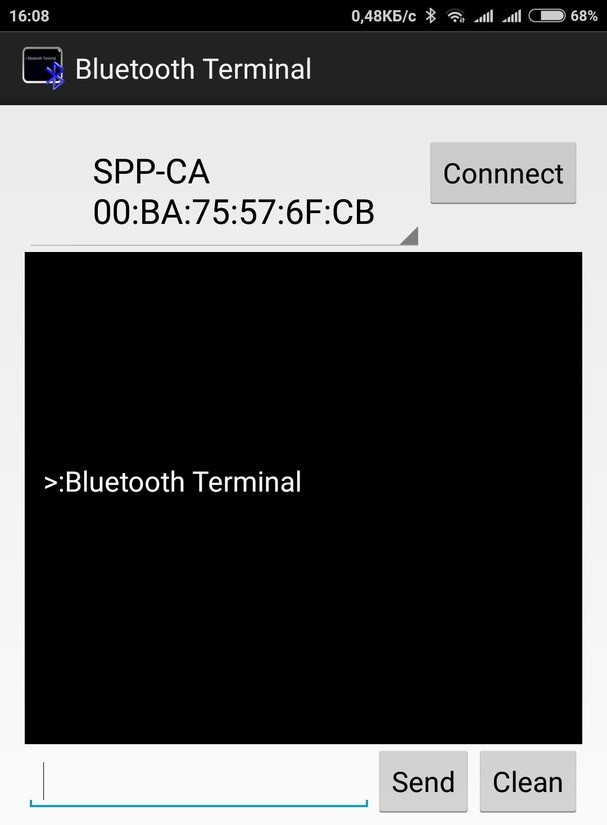
Для проверки подключения можно запустить простой терминальчик
Далее, запускаем приложение Remotexy и устанавливаем связь с модулем.
Проверяем работоспособность скетча.
Далее, я добавил включение-выключение светодиодов («люстра», фары).
В приложении есть возможность получать ответ Ардуины о включении.
Далее, можно усложнять скетч, вводить ШИМ, джойстики, сервомашинку, управление акселерометром и т.п.
Дополнительная информация - скетч для примера
// определение режима соединения и подключение библиотеки RemoteXY
#define REMOTEXY_MODE__SOFTSERIAL
#include <SoftwareSerial.h>
#include <Servo.h>
#include <RemoteXY.h>
// настройки соединения
#define REMOTEXY_SERIAL_RX 2
#define REMOTEXY_SERIAL_TX 3
#define REMOTEXY_SERIAL_SPEED 9600
// конфигурация интерфейса
#pragma pack(push, 1)
uint8_t RemoteXY_CONF[] =
{ 255,3,0,3,0,51,0,8,13,0,
65,4,8,29,9,9,5,54,40,17,
30,30,2,26,31,66,164,83,5,13,
10,2,24,66,164,84,21,13,10,2,
24,2,1,3,45,22,11,2,26,31,
31,79,78,0,79,70,70,0 };
// структура определяет все переменные вашего интерфейса управления
struct {
// input variable
// uint8_t led; // =1 если кнопка нажата, иначе =0
int8_t joystick_1_x; // =-100..100 координата x положения джойстика
int8_t joystick_1_y; // =-100..100 координата y положения джойстика
uint8_t switch_led; // =1 если переключатель включен и =0 если отключен
// output variable
uint8_t led_1_r; // =0..255 яркость красного цвета индикатора
int8_t level_X; // =-100..100 положение уровня
int8_t level_Y; // =-100..100 положение уровня
uint8_t connect_flag; // =1 if wire connected, else =0
} RemoteXY;
#pragma pack(pop)
/////////////////////////////////////////////
// END RemoteXY include //
/////////////////////////////////////////////
Servo servo_x;
//#define PIN_LED 13
//#define PIN_LED 11
#define PIN_SWITCH_LED 11
#define PIN_LEDB 12
void setup()
{
RemoteXY_Init ();
servo_x.attach(9);
pinMode (PIN_SWITCH_LED, OUTPUT);
pinMode (PIN_LEDB, OUTPUT);
}
void loop()
{
RemoteXY_Handler ();
int PIN_DIR = 4;
int PIN_SPDF1 = 5;
int PIN_SPDB1 = 6;
int PIN_SPDF2 = 7;
int PIN_SPDB2 = 8;
digitalWrite(PIN_LEDB, LOW);
digitalWrite(PIN_SWITCH_LED, (RemoteXY.switch_led==0)?LOW:HIGH);
RemoteXY.led_1_r = (RemoteXY.switch_led==HIGH)?255:0;
//********************************** Y
int pos = RemoteXY.joystick_1_y;
RemoteXY.level_Y = RemoteXY.joystick_1_y; // уровень показывает среднее положение
if (pos>0) { // вперед
digitalWrite(PIN_DIR, HIGH);
analogWrite(PIN_SPDF1, (pos) * 2.55);
analogWrite(PIN_SPDF2, (pos) * 2.55);
}
else if (pos<0) { // назад
digitalWrite(PIN_DIR, LOW);
analogWrite(PIN_SPDB1, (pos) * 2.55);
analogWrite(PIN_SPDB2, (pos) * 2.55);
}
else { // стоп
digitalWrite(PIN_DIR, LOW);
analogWrite(PIN_SPDB1, 0);
analogWrite(PIN_SPDF1, 0);
analogWrite(PIN_SPDB2, 0);
analogWrite(PIN_SPDF2, 0);
}
int SERVO_X_Center = 1500;
int posX = RemoteXY.joystick_1_x;
// int SERVO_Y_Center = 1500;
if (posX>0) { // вперед
servo_x.writeMicroseconds(posX*10 + SERVO_X_Center);
}
else if (posX<0) { // назад
servo_x.writeMicroseconds(SERVO_X_Center + posX * 10);
}
else { // центр
servo_x.writeMicroseconds(SERVO_X_Center);}
}
Примеры видео того, что у меня получилось.
Машинку я замучил до севших батареек. На видео короткий тест — машинка работает.
Сразу скажу про небольшие минусы — нужно одновременно с внеднением контроллера переделывать питание — ставить парочку 18650 + контроллер питания (заряд-разряд-защита). Ну и у меня вылез откуда-то дребезг на серве, нужно устранять.
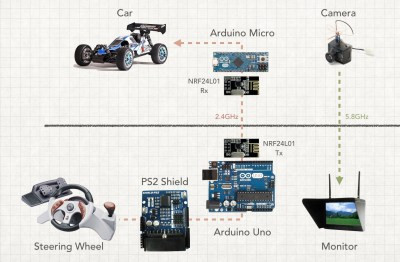
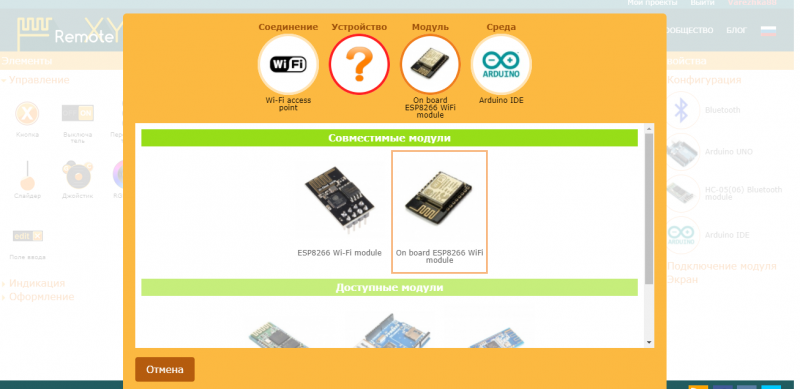
Собственно говоря, все остается как есть — Ардуина + силовые выходы. Добавляется вместо BT-модуля другой — ESP8266, подключение будет либо напрямую к точке доступа, либо через облачный сервер.
С выхода RX/TX ESP8266 команды подаются на Ардуину и все по накатанной.
Ну и применяется соответствующая настройка в приложении.
На фото прописаны контакты RX/TX, а также пароль для подключения к точке доступа.
Ну и все. Скетч нужно пересобрать с указанными изменениями, остальная часть с ШИМ остается такая же, как и с Bluetooth Car. Внешний вид интерфейса управления также не изменяется. Можете попробовать самостоятельно.
Ардуине быть)))) Удобно, наглядно, поучительно.
Брать DIY конструкторы для обучения азам — дороговато. А вот переделать имеющуюся машинку с радиоуправления на контроль через BT/WiFi — бесценно))))
У меня впереди печать корпуса для установки сервопривода, а также печать корпуса-кузова модели. Контроллер на борту значительно расширяет возможности р/у машинки — можно установить дополнительные датчики (препятствия, линии и т.п.) и играться в свое удовольствие.
Что касается краулеров — это действительно удобные и в меру продуманные игрушки, поддающиеся ремонту и переделке. Конкретно модель JJRC Q45 — это неплохой представитель краулеров, отличающийся наличием Wi-Fi управления и курсовой камеры. Можно управлять со смартфона и сохранять фото-видео. Естественно, какого-либо суперкачества фотографий ожидать не стоит — это простая курсовая (FPV) камера. Лично мне понравилась реализация управления через WiFi (выходы Rx/Tx с Марвеловского контроллера).
У меня будет вопрос: нужно ли дальше развивать тематику Arduino и беспроводного управления, т.ч. машинками? Могу вынести полезную информацию в отдельный пост, чуть более подробно, с детальным описанием скетчей и 3д моделями. Возможно, это будет полезнее, чем вот такой сумбурный пост. Особенно, учитывая то, что управление через BT/WiFi подходит не только для краулеров, но и для всех р/у автомобилей, а также других видов игрушек. И даже больше — на подобном подходе можно сделать управление домом и небольшую автоматизацию.
Пишите в комментариях, кому и что именно интересно.
В обзоре была использованы ресурсы сайта-конструктора RemoteXY, по большому счету можно сделать тоже самое другими средствами, например Blink, или аналогичными. Смысл управления от этого не изменяется. Можно написать все с нуля, это даст гораздо больше опыта, пользы и набитых шишек.
Зарегестрировать сотню-другую фейковых аккаунтов и проголосовать). Некоторые обзаратели на этом даже уже палились ибо тупили всё из под одного ip делали))
пысы DIY инструкция по применению ыыыыы)).
Хорошо, доступно)Сын растёт))Занимался ремонтом игрушек на радио… по углам с 10ток машин и 10ток вертолётов)
Думаю — нужно продолжать тему, рукастые с детьми будут благодарны.
























пысы DIY инструкция по применению ыыыыы)).
КремльЗимний дворец тоже…пысы солнечно +16 по Цельсю
Дождь зарядил
Однозначно нужно!
Думаю — нужно продолжать тему, рукастые с детьми будут благодарны.
Тоже неплохой вариант для самоделок.