Это по счёту мой третий коптер, и первый из тех, который я не смогла разбить не то что в первый день, а даже за неделю. А это многое значит :)))))))) Камера тут просто для галочки, и надпись HD camera тем более, но сам квадрик шустрый и лёгкий в освоении.
Краткие ТТХ:
Модель: Syma X22W
Размеры: 14х14х3см
Разрешение камеры: Заявлено 1мп, на самом деле 0.3мп (640х480)
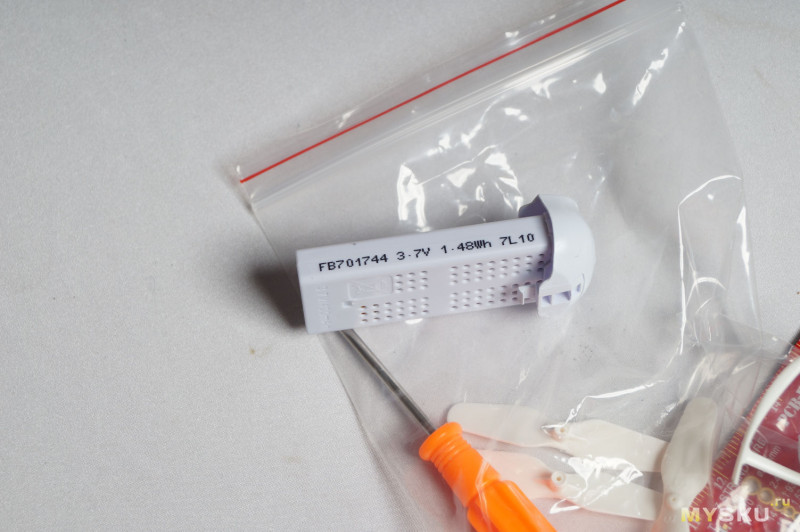
Аккумулятор: 3.7в 400мАч
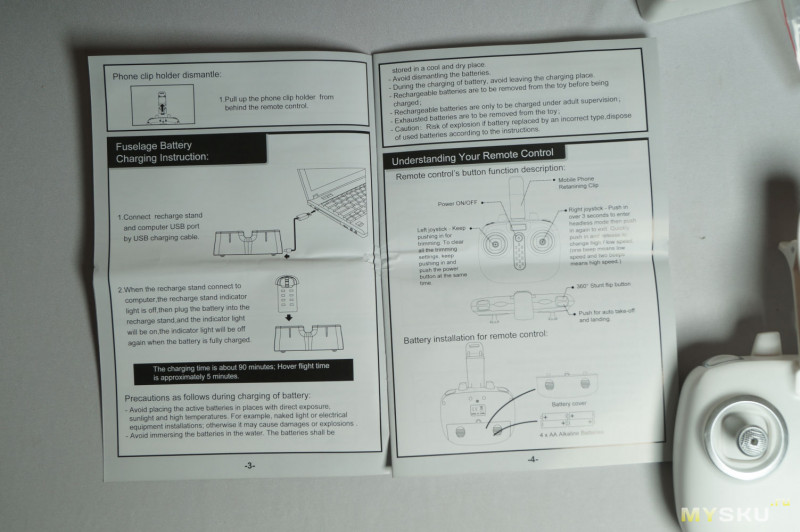
Время зарядки: 90 минут
Подключение к телефону: Wifi через проприертарное приложение
Расстояние работы пульта управления: до 70 метров на открытой местности
Время автономной работы: До 5 минут (с включённым wifi заметно меньше)
Комплектация: Квадрокоптер, защитные насадки на пропеллеры, 4 запасных пропеллера, 1 аккумулятор, сдвоенная зарядка, пульт управления, клипса для установки телефона на пульт управления.
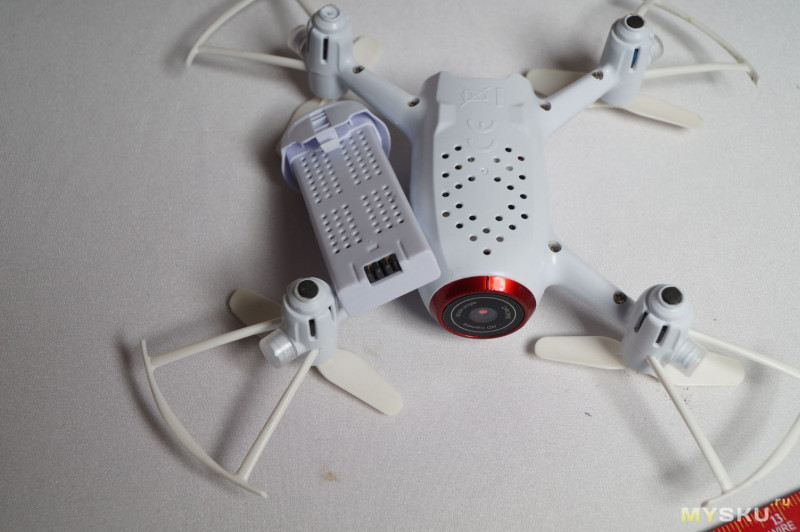
Комплектация вполне стандартная, радует защита на пропеллеры, она мне действительно помогла. Квадрик небольшой и красивый, я выбрала белый цвет, хотя есть и чёрные модели.
Надписи на ободке камеры носят декоративную функцию, и отношение к реальности не имеют.
В плечах коптера по паре красных и зеленных, довольно ярких, светодиодов.
Аккумулятор с «проприертарным» разъёмом, на ибее стоит под 10 долларов, на таобао — 2.
Зарядное устройство интересно тем, что рассчитано сразу на два аккумулятора. Но даже один заряжает больше часа, не знаю как долго он будет заряжать сразу два аккумулятора.
Пульт управления небольшой размером, в руке лежит удобно, но требует для питания 4 элемента формата АА. Почему не сделали ААА, я так и не смогла понять.
В пульт вставляется клипса, для удержания телефона. Клипса реально мощная, вот, даже целую лампочку держит.
Управление коптером возможно как с помощью пульта, так и с приложения в телефоне — Syma Go (скачать можно по QR коду из мануала). Мануал хотя и детальный, но не очень информативный, и только на английском языке.
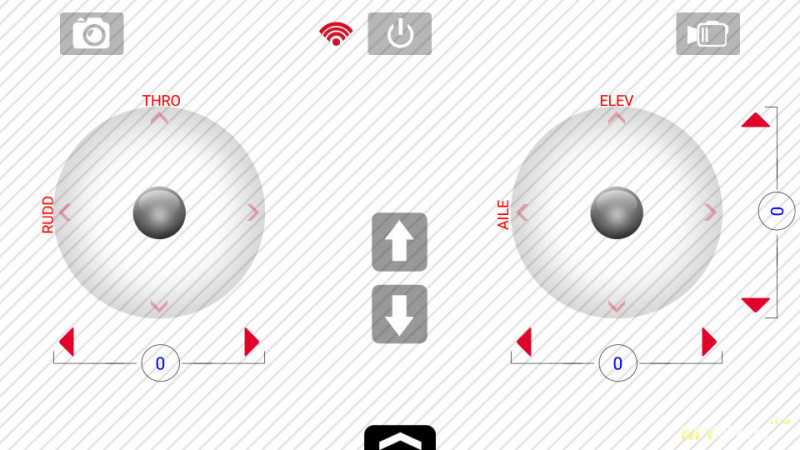
Для использования приложения, до его запуска надо в ручную подключится к точке доступа, которую создаёт коптер. Иначе, в приложении получим белый экран:
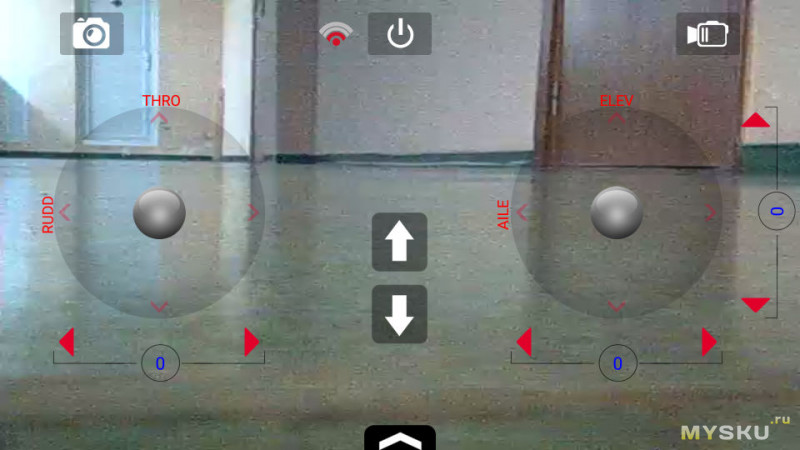
После подключения, в приложении появляется «живое» видео, у которого заметный лаг и есть пропуски кадров.
Управление интуитивно понятное, как на пульте, так и из приложения можно запускать плавный взлёт и посадку, устанавливать направление «носа» коптера, а в приложении даже можно рисовать траекторию полёта, которую коптер по идее будет отрабатывать, но малейший чих и дуновение ветра его сносит с траектории — она не привязана ни к GPS, ни к высоте (хотя фирма и утверждает про встроенный барометрический контроль, но это сказка из той же оперы, что и HD камера).
Камера тут чисто для галочки, слота под SD карточку есть, запись только в приложении на телефон, где видео пишется с разрешением 640х480 пикселей, 20 кадров в секунду и 500кбит битрейта. Качество фото и видео можете оценить по образцам ниже.
Как вы могли убедиться сами, камера явно не главный козырь данного летательного аппарата. Но чем же он мне понравился? А тем, что он достаточно прочный — я его и об стены била со всего размаху, и вниз роняла, и в листву залетал, а ничего не сломалось вообще. Я считаю, только за это коптер достойн внимания.
Товар предоставлен для написания обзора магазином. Обзор опубликован в соответствии с п.18 Правил сайта.
Планирую купить+8Добавить в избранноеОбзор понравился
+10
После третьего запуска со словами «Когда-нибудь починю» относится в кладовку и там гниет, пока внуки не выбросят. У меня вот пульты в рабочем состоянии накопились, вот их жалко, если сгниют, но никому не надо.
Дорогостоящее увлечение если втянуться. Начинается с мелколетов, потом приходит понимание что без барометра ничерта не получиться развивать навыки новичку, потом захочется с GPS, камерой получше и в итоге дом будет завален кучей моделей от 1000 до 30000 рублей минимум, общей стоимостью все 50к ))
Внезапно. Сам приобрёл такой квадрик недавно, и даж думал про обзор.
Крч, пост вполне объективный, квадрик действительно неубиваемый, хотя я врезался на нём в стены, пилил винтами ножки стола, и даже свою руку. Пока все лопасти живы.
Добавлю, что с телефона управлять почти нереально, и дико неудобно. Пульт — единственный нормальный вариант. Угол обзора камеры плохой, объектив фишай был бы гораздо полезнее. По камере в квартире не полетаешь. (полетаешь, конечно, но недолго)
Батарейки хватает минут на 5-6. Смена батареи и зарядка гораздо удобнее, чем у аналогичного, с подключением перетыкиванием проводков.
Аккумулятор: 3.7в 400мАч
Время автономной работы: До 5 минут (с включённым wifi заметно меньше)
Это сколько должен потреблять WiFi чтобы при 5 минут времени полета оказать заметное влияние.
Даже если он будет потреблять 1 Ампер, то «скушает» за 5 минут всего около 33 мАч из 400.
Да, я выше несколько ошибся, спасибо что поправили.
Камера и WiFi при токе потребления в 1 Ампер за 5 минут «скушают» не 33 мАч, а 83, из 400.
Но все равно, неужели так заметно разницу в 20%? Особенно при условии что 1 Ампер это явно с запасом.
Мне кажется, что стиль «вождения» куда как больше может повлиять на время автономности, чем увеличение потребления.
я не смогла разбить не то что в первый день, а даже за неделю. А это многое значит :))))))))
Это по счёту мой третий коптер
Первая фраза полностью объясняет вторую _))
Дело вообще не в том. У меня самым первым коптером был знаменитый в то время Хабсан Х4, а он гораздо прочнее этой Симы, и он тоже прожил у меня меньше недели)) Каким бы не был ваш мануальный коптер, он в любом случае обречен на смерть в первые несколько полётов.
Хотя Симы эти довольно хороши за те деньги, что за них просят.
Спасибо за обзор!
По поводу неубиваемости — все мелколеты долго живут за счет своего веса. Вспомнить cheerson 10 или floureon H101 — у меня они уже несколько лет, спокойно даю гостям «порулить» потому что максимум сломают винты, коих у меня жмень в пакете.
его сносит с траектории — она не привязана ни к GPS, ни к высоте, хотя фирма и утверждает про встроенный барометрический контроль, но это сказка
Так как ТС редко отвечает на вопросы в своих комментариях — отвечу сам себе. Левый стик подпружинен, без барометра невозможно было бы реализовать удержание высоты после возврата стика в центральное положение.
Это, кстати, еще одна причина по которой аппарат еще не пострадал. Чтобы проще было удерживать высоту угол наклона ограничен. В отличии от собратьев со свободным стиком — там при сильном наклоне приходится подгазовывать чтобы компенсировать высоту и разгон получается больше.
Смотрите в первую очередь на удержание высоты — шанс сломать уменьшится во много раз, да и веселья больше, а не полеты до потолка и обратно =) ну и чем меньше модель тем сложнее ее разбить.
я уже однажды задавал безответный вопрос в пространство, попробую переформулировать:
при подъёме на «7»см статическое давление (в спокойном, невозмущённом воздухе) должно упасть на 1Па, из 100000
даже это уже 10^5=2^17=100дБ
так существует ли «датчик», или есть только
вялые настройки расходов
грамотно выставленные задержки реакции
правильно настроенные фильтры судорожных рывков из канала управления
удачно подобранные коэффициенты в пид
и прекрасное понимание=предсказание алгоритмом стиля действий пилота «в целом»?)
я уже однажды задавал безответный вопрос в пространство, попробую переформулировать:
А я вот возьму и отвечу )
при подъёме на «7»см статическое давление (в спокойном, невозмущённом воздухе) должно упасть на 1Па, из 100000
Возможно мозги не отличат 7 см от 10, старшие модели коптеров обычно дают показания с точностью в 1 десятую метра. На низкой высоте(пол метра и ниже) из за множества потоков воздуха могут врать.
За данную модель не скажу, т.к. не владел ей лично и не разбирал, в остальных видел датчики лично.
вялые настройки расходов
грамотно выставленные задержки реакции
правильно настроенные фильтры судорожных рывков из канала управления
удачно подобранные коэффициенты в пид
и прекрасное понимание=предсказание алгоритмом стиля действий пилота «в целом»?)
Слишком сложно. Вот квадрик на высоте 2 метра, барометра нет. Дали газу, аппарат поднялся на 3 метра и Вы опустили стик в середину. Как электроника поймет какие нужны обороты для поддержания данной высоты?
Пусть даже расходы вялые, все равно с подъемом нужны бОльшие обороты для поддержания положения и меньшие при снижении.
Бародатчик стоит копейки, завязать на нем контроль оборотов не потребует больших вычислительных мощностей от «мозгов».
Furibee F36. На Гире часто по $10 проскакивает, сейчас $12 с доставкой (https://www.gearbest.com/rc-quadcopters/pp_571962.html?wid=1433363). Легко рулится, винты закрыты. Удержания высоты, конечно, нет, но он и так легко держится на одной высоте, настроен неплохо.












1 Не знаю нахрена он мне.
2 См. пункт 1.
У меня так с планшетом было…
бакаут→ бальса,бакелит→ балинит — ok!Крч, пост вполне объективный, квадрик действительно неубиваемый, хотя я врезался на нём в стены, пилил винтами ножки стола, и даже свою руку. Пока все лопасти живы.
Добавлю, что с телефона управлять почти нереально, и дико неудобно. Пульт — единственный нормальный вариант. Угол обзора камеры плохой, объектив фишай был бы гораздо полезнее. По камере в квартире не полетаешь. (полетаешь, конечно, но недолго)
Батарейки хватает минут на 5-6. Смена батареи и зарядка гораздо удобнее, чем у аналогичного, с подключением перетыкиванием проводков.
Даже если он будет потреблять 1 Ампер, то «скушает» за 5 минут всего около 33 мАч из 400.
5'=1/12 h, общий бюджет потребления «4.8» A
6'=1/10 h, … «4.0» A
разница 3W брутто;)
Камера и WiFi при токе потребления в 1 Ампер за 5 минут «скушают» не 33 мАч, а 83, из 400.
Но все равно, неужели так заметно разницу в 20%? Особенно при условии что 1 Ампер это явно с запасом.
Мне кажется, что стиль «вождения» куда как больше может повлиять на время автономности, чем увеличение потребления.
Дело вообще не в том. У меня самым первым коптером был знаменитый в то время Хабсан Х4, а он гораздо прочнее этой Симы, и он тоже прожил у меня меньше недели)) Каким бы не был ваш мануальный коптер, он в любом случае обречен на смерть в первые несколько полётов.
Хотя Симы эти довольно хороши за те деньги, что за них просят.
Спасибо за обзор!
отлично — значит, мозгов в нём гарантированно нет
тут надо внимательно смотреть на последнюю букву обозначения и изучать матчасть…
P.S. А на гусеницах — не квадрик))?
То есть левый стик не подпружинен?
Это, кстати, еще одна причина по которой аппарат еще не пострадал. Чтобы проще было удерживать высоту угол наклона ограничен. В отличии от собратьев со свободным стиком — там при сильном наклоне приходится подгазовывать чтобы компенсировать высоту и разгон получается больше.
при подъёме на «7»см статическое давление (в спокойном, невозмущённом воздухе) должно упасть на 1Па, из 100000
даже это уже 10^5=2^17=100дБ
так существует ли «датчик», или есть только
вялые настройки расходов
грамотно выставленные задержки реакции
правильно настроенные фильтры судорожных рывков из канала управления
удачно подобранные коэффициенты в пид
и прекрасное понимание=предсказание алгоритмом стиля действий пилота «в целом»?)
Возможно мозги не отличат 7 см от 10, старшие модели коптеров обычно дают показания с точностью в 1 десятую метра. На низкой высоте(пол метра и ниже) из за множества потоков воздуха могут врать.
За данную модель не скажу, т.к. не владел ей лично и не разбирал, в остальных видел датчики лично.
Слишком сложно. Вот квадрик на высоте 2 метра, барометра нет. Дали газу, аппарат поднялся на 3 метра и Вы опустили стик в середину. Как электроника поймет какие нужны обороты для поддержания данной высоты?
Пусть даже расходы вялые, все равно с подъемом нужны бОльшие обороты для поддержания положения и меньшие при снижении.
Бародатчик стоит копейки, завязать на нем контроль оборотов не потребует больших вычислительных мощностей от «мозгов».
" Мой первый квадрик"
Это в смысле «кто у нас не 1й, тот п.18й »?